Se c’è una cosa che ti lascia in eredità il corso di elettromagnetismo è che i campi magnetici sono antipatici. Quelli elettrici sono facili: basta tirare un po’ di freccette e grosso modo si capisce che forma avrà il campo totale o da che parte si muoveranno le cariche. I campi magnetici tirano dentro i rotori e la regola della mano destra; devi iniziare a ragionare in termini di vettori entranti o uscenti dalla pagina e via di questo passo. Ma la presenza dei rotori nelle equazioni di campo magnetico, oltre a introdurre complessità, introduce anche possibilità. Costruire campi magnetici che ruotano è facile: basta saper giocare con le correnti. E con i campi magnetici che ruotano ci si possono fare tante cose, dalla risonanza magnetica ai motori elettrici. Come questo sia possibile lo scoprirete in quest’articolo.
Le magie dei campi magnetici
Tutti quanti, ad un certo punto della vita, ci siamo trovati a giocare con le calamite. Ci sono i giochini semplici, quelli che fai avvicinando due calamite per capire qual è la distanza minima dopo la quale iniziano ad attrarsi, o tenendo una calamita sospesa sopra ad un qualche oggetto metallico e facendola scendere pian piano, fino a che, ad un certo punto, se l’oggetto è abbastanza leggero… Magia! L’oggetto salta su e si va ad attaccare alla calamita! Oppure prendi calamite di poli opposti e ne usi una per respingere l’altra: le avvicini, forzandole a stare una contro l’altra, anche se le senti chiaramente tremarti in mano e tentare di sfuggirti dalle dita. I più arditi tentano esperimenti più sofisticati, tipo quelli che prevedono di cospargere un foglio di limatura di ferro e di poggiarci sotto (mi raccomando, bambini, non sopra, sennò fate un macello!) una calamita. Magicamente dovrebbero formarsi le linee di campo magnetico. Anche se l’esperimento non dovesse funzionare, rimane intatto lo stupore davanti alle piccole particelle di ferro che si muovono da sole, attratte dalla calamita (per non parlare delle scintille che sprizzavano dalla mola che avete usato per farla, quella limatura!).
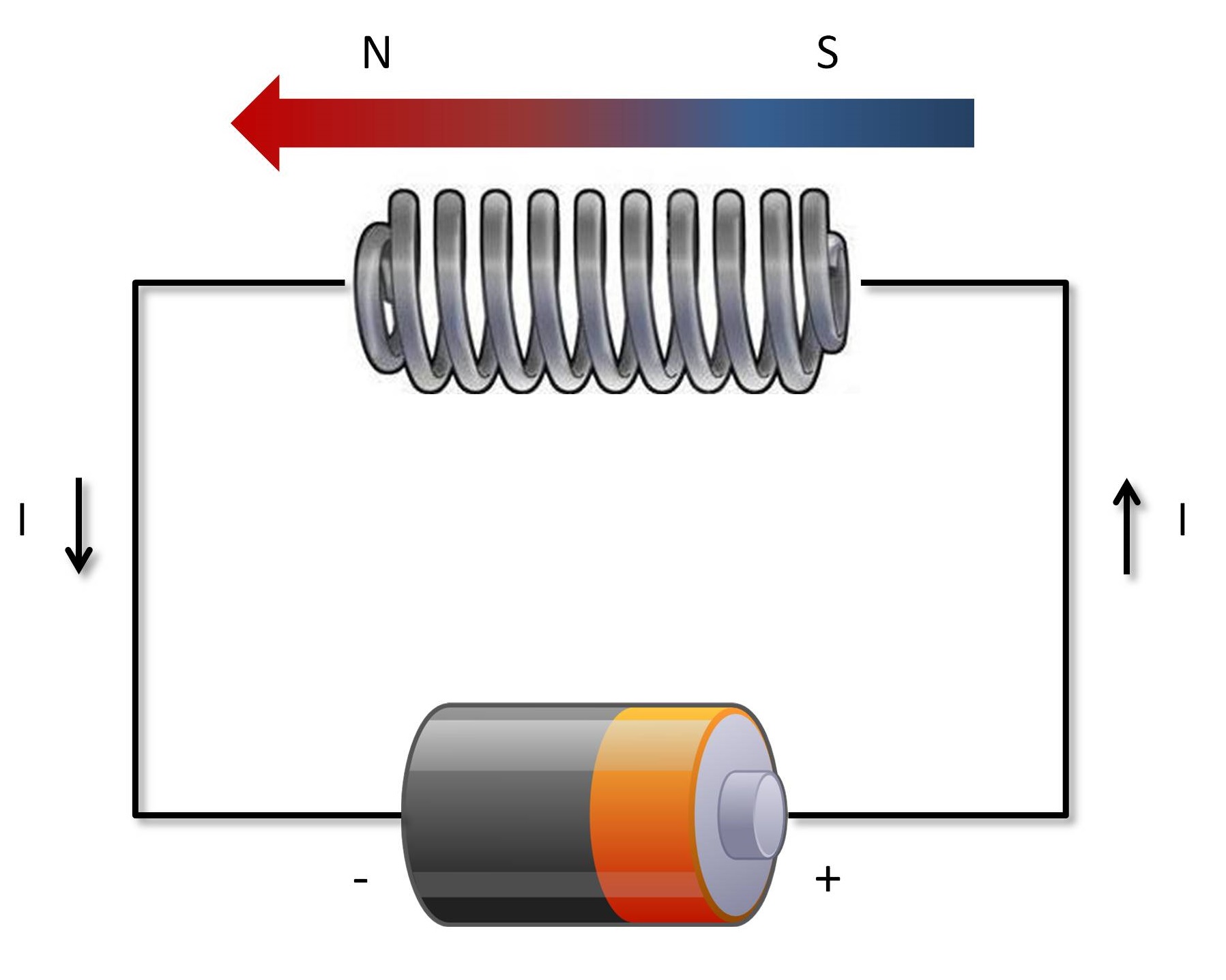
Figura 1: L'elettromagnete.
Anni dopo, di solito dalle parti del liceo, ti presentano un concetto simile, che è quello di elettromagnete. Prendete del filo percorso da corrente e avvolgetelo attorno ad un bullone (Figura 1): il tutto si comporterà come una calamita! E se scambiate il verso della corrente (basta scambiare i morsetti della batteria), la calamita cambia polarità! Sarà solo all’università che ti spiegheranno i solenoidi, la regola della mano destra e il fatto che se non ci metti il bullone per aumentare la µ il campo è troppo basso per servire a qualcosa, ed è solo lì che capirai come funziona un elettromagnete. Ma non ci vuole una comprensione così profonda per iniziare a pensare un po’. Muovete una calamita accanto all’ago di una bussola e quello seguirà fedelmente la calamita. Spostate bruscamente la calamita da un capo all’altro della bussola e l’ago ruoterà vorticosamente per riallinearsi alla calamita. Ma se attaccassi un’asse all’ago della calamita, quello inizierebbe a ruotare, tipo motore? In effetti sì. E in effetti, spostare la calamita da un lato all’altro della bussola equivale a invertire la polarità del campo magnetico esterno in cui è immerso l’ago. Quindi, se posso generare un campo magnetico pompando corrente in un solenoide, e se per invertirlo mi basta scambiare il verso della corrente, e quindi all’atto pratico semplicemente come sono collegati due fili, non è che riesco a far ruotare un’asse semplicemente giocando con i versi delle correnti?
I motori in corrente continua

Figura 2 - Un semplice motore elettrico.
Supponiamo di mettere una calamita tra due elettromagneti (Figura 2). La calamita la imbulloniamo per bene ad una superficie, magari facendo passare una vite per il suo centro, abbastanza lasca da farla ruotare. La calamita tenderà a ruotare in senso orario, così da allineare il suo polo nord al solenoide sud e il suo polo sud al solenoide nord. Se nel momento in cui la calamita si allinea ai solenoidi (o, meglio ancora, leggermente prima) cambiassimo la loro polarità, la calamita si troverebbe con il polo nord sul solenoide nord e con il polo sud con il solenoide sud, e tenderebbe a continuare a girare in senso orario. Se, una volta allineata di nuovo nord con sud e sud con nord, cambiassimo di nuovo la polarità dei solenoidi, la rotazione continuerebbe. Se attaccassimo una ruota alla calamita, avremmo un motore elettrico!
Questo, sostanzialmente, è il principio di funzionamento dei cosiddetti motori in corrente continua. Questi motori utilizzano un commutatore a spazzole per cambiare la polarità dei solenoidi. Una spazzola è semplicemente un contatto strisciante, tipo tergicristalli, che passa da un contatto all’altro ogni tot tempo. Si tratta di motori molto [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3756 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:

HackRF One una guida pratica: dalla decodifica dei segnali al Penetration Testing – Seconda parte
IoT è chi IoT lo fa: uno smart-stand per il nostro smartphone
Metodo della funzione descrittiva per lo studio di un Ring Oscillator
Come l’Intelligenza Artificiale sta rivoluzionando la diagnostica medica

Pulizia e linearità è quello che serve per mandare giù argomenti poco amichevoli come questi, bell’articolo, grazie.
Ora ti esorto a fare il salto, ed a pensare sulla stessa linea espositiva un articolo sull’ Half Stepping; apparentemente riconducibile alla semplicità appena vista.
Salve, ero alla ricerca di un articolo divulgativo per degli studenti e mi sono imbattuto in questo lavoro, leggendolo mi sono accorto che qualcosa non torna. L’affermazione: “Cambiando il duty cycle, possiamo cambiare anche la tensione efficace applicata al gate dei transistor, pur continuando a lavorare con segnali digitali. Quindi, possiamo anche cambiare la velocità di rotazione del motore.” mi pare si riferisca ad un brushless, giusto? se così è errata.
Il duty cycle della PWM controlla la corrente di statore del sincrono, che non deve eccedere per non saturare il ferro di statore, ma per variare la velocità del BLDC serve variare la frequenza della PWM, che è cosa ben diversa. Sbaglio?
Grazie
AS
Ciao, no, se vari il duty cycle vari anche la velocità. Considera che ad un duty cycle maggiore corrisponde una tensione maggiore sul transistor, cui corrisponde più corrente di drain, cui corrisponde un campo magnetico più elevato all’interno del solenoide, da cui derivano maggiori forze di attrazione\repulsione tra statore e rotore, dunque una maggiore rapidità nel riallineamento dei poli e quindi una maggiore velocità di rotazione. Il contrario se il duty cycle diminuisce.
Se interpreto bene il tuo ragionamento, variando la frequenza della PWM varia anche il tempo in cui i transistor sono accesi\spenti e quindi il modo in cui il motore si muove, dunque la sua velocità. Forse potrebbe anche funzionare, ma devi considerare una serie di problemi tecnici:
– modulare in frequenza un segnale trapezoidale non è semplice. Gli impulsi in uscita in genere sono multipli o sottomultipli interi del clock interno; se usi un microcontrollore, la frequenza di clock e i suoi divisori possono essere variati, ma non in maniera particolarmente fine, e comunque giocare con la frequenza di clock mentre il micro sta lavorando l’ho sempre trovato difficoltoso. Considera anche che, se controlli il motore in retroazione con un PID, la frequenza di clock andrebbe cambiata di continuo. I micro moderni invece contengono già della circuiteria dedicata per la generazione della PWM, e per cambiare il duty cycle basta cambiare il valore di un registro: operazione semplice, immediata, indolore, e con risultati molto più precisi.
– La modulazione in frequenza è ancora più complicata se volessi generare un multiplo non intero della frequenza di clock. Dovresti progettare della circuiteria dedicata che prima sovracampioni e poi sottocampioni il clock, e i fattori di sovra\sottocampionamento devono variare di continuo…
– Far commutare i transistor a frequenze elevate (come potrebbe succedere) produce tutta una serie di problemi. Considera che qui stiamo cercando di pilotare un circuito induttivo, che in quanto tale ha un tempo di reazione non nullo. Ce la farebbe a seguire i continui spegnimenti\accensioni del transistor?
– Transistor che commutano troppo velocemente generano problemi di compatibilità elettromagnetica, in quanto al momento della commutazione si associa l’emissione di impulsi EM che possono dare fastidio agli apparati circostanti.
– Ancora, il consumo di un circuito digitale è direttamente proporzionale alla sua frequenza di commutazione: più rapidamente commuta il transistor, più elevato è il consumo.
Ciao, grazie delle spiegazioni, a parte le problematiche tecnologiche che sono altra cosa… continuo a non essere d’accordo sulla spiegazione di principio, la semplice variazione della PWM non modifica direttamente la velocità, il BLCD è cosa diversa da un brushed.
Non è mia volontà dilungarmi troppo, ma ora provo a spiegarmi meglio…
Se stiamo parlando di un BLCD, cioè di un motore sincrono con rotore composto da magneti permenenti, il fatto di aumentare la corrente delle fasi (limitatamente alla possibilità ferromagnetiche) porta certamente ad un aumento della forza attrattiva e quindi della coppia. Tuttavia l’unico modo di portare in rotazione il rotore è quello di produrre un campo rotante per mezzo della composizione di tre correnti sfasate di 120 gradi. Ora nella migliore delle ipotesi queste correnti sono sinusoidali, nella peggiore quadre. Oppure come si fa di solito, le correnti sinusoidali sono realizzate per approsimazione con un PWM a freq fissa e modulata con legge sinusoidale. Tuttavia volendo che il rotore giri il campo deve ruotare e volendo variare i giri la frequenza, ovvero il periodo della modulazione sinusoiddale della PWM deve variare. Qundi la freq della PWM rimane costante (poniamo 10 o 20KHz), ma la legge di modulazione sinusoidale con cui variamo la PWM deve cambiare di frequenza in maniera poporzionale ai giri, così lavorano gli inverter. Nei BLCS c’è poi il problema di mantenere il sincronismo tra campo di rotore e statore, cosa che negli asincorni non c’è… ma questa è un altra storia 🙂
Grazie e buon Natale
A presto
Bè, direi che stiamo dicendo la stessa cosa… Come affermi giustamente tu, la frequenza della PWM rimane costante e si applica una modulazione alla larghezza dei suoi impulsi, quindi al duty cycle… E tale modulazione dipende dall’effetto che si vuole ottenere sul motore. E’ esattamente così che funziona.
Buone feste anche a te!