
Da un pretesto didattico per interessare i ragazzi all’elettronica e all’automatica, già in tenera età (8-13 anni) dopo aver letto alcune iniziative on line, è scaturita una idea che, per gioco, abbiamo usato per partecipare al “Contest EOS” vincendo una delle 20 schede Infineon per Arduino per il controllo di motori in cc.
Partendo da una richiesta che ogni genitore, prima o poi si sente fare dai propri figli ("papà, voglio un cane!!") e, cercando un po’ di tergiversare pur volendo accontentare mia figlia di otto anni, alla ennesima volta ho risposto che forse un cane ce lo avevamo già, ed era un cane elettronico che per miracolo si era salvato tra i giochi distrutti dai fratelli perché era finito in cantina a causa di un filo staccato che io avrei sempre dovuto saldare ma non ho mai trovato il tempo di farlo, le ho promesso che lo avrei messo a posto subito per farlo ripartire, placando momentaneamente la sua richiesta.
Essendosi dimostrata entusiasta ho subito rimesso in moto il cane!!! Faceva parte di una serie di giochi per autocostruzione di “robottini” che simulavano i movimenti di animali che avevo comprato per i due fratelli più grandi in qualche aeroporto europeo nei tempi in cui per lavoro giravo molto… il cane era l’unico sopravvissuto!!


Presto però la sola simulazione della camminata (secondo mia figlia “un po’ robotica”) non era abbastanza per far sembrare “vero-simile” il nostro cane elettronico e quindi mia figlia ha immediatamente presentato la critica che voleva un cane che sembrasse più vero e cioè che avrebbe dovuto fare altre cose … che fanno tutti i cani come il mio Snoopy che avevo quando ero piccolo (...come dire tu hai avuto un cane da piccolo, me lo ha raccontato la nonna, perché io no!!)!!
E’ scaturita così la necessità di richiederle quali per lei fossero i movimenti più realistici che dovesse avere un cane per assomigliare ad uno vero: Subito è stato sentenziato; “un cane vero fa la pipì alzando la zampetta e quando piove e si bagna si scrolla l’acqua da dosso vibrandosi dalla testa alla coda!!”.. questa è stata poi l’idea vincente per il contest!!
In quei giorni avevo preso un nuovo kit Arduino e stavo leggendo il manuale, quando mi è arrivato l’alert di EOS sul contest ed ho pensato che almeno per uno dei due movimenti richiesti per far sembrare più reale il cane la scheda sarebbe potuta andar bene. In particolare per le vibrazioni, avendo l’opportunità di poter comandare due motori, di quelli con ventola disallineata che si possono ricavare nei vecchi cellulari utilizzati per i vibracall, facendo partire in sequenza prima uno (vibrazione testa), poi l’altro insieme (vibrazione intera), poi solo il secondo (vibrazione coda) utilizzando uno sketch temporizzato magari in un ciclo FOR


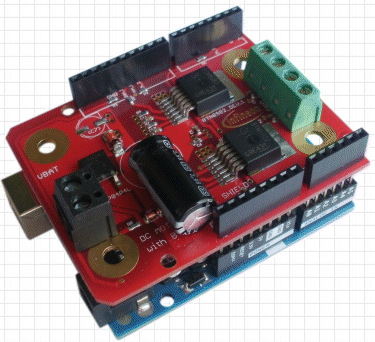
Controllo due motori unidirezionali
Per utilizzare un due motori unidirezionali con lo shield, effettuare le seguenti operazioni:
- collegare il motore 1 a OUT1 e GND, il motore 2 OUT2 e GND
- collegare VBAT E GDN
- set INH1 e INH2 a HIGH (dopo arresto camminata)
- utilizzare IN1 per controllare il motore 1, IN2 per il motore 2 tramite in cicli come descritto sopra (per vibrazione testa, corpo, coda) dopo aver spento la camminata!
L’effetto dovrebbe essere descritto in Questo flow A

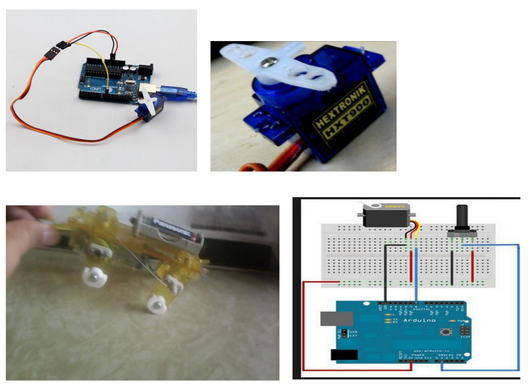
Mentre per l’alzata della zampetta (per semplicità di tutte e due le zampe su di un lato contemporaneamente) avrei potuto utilizzare il motore di servocomando in dotazione nell’Arduino starter kit con uno sketch che in PWM imponesse una doppia mezza rotazione al “sollevatore di zampa” per il quale si utilizza la levetta del servocomando o una camme appositamente smontata da un altro gioco affinché in cinque passi venisse fornito l’effetto pipì con:
Questo flow B

Dopo la realizzazione modificando gli sketch presenti nelle librerie on line dovrebbe essere possibile che le routine descritte nei flussi A e B vengano comandate da pulsanti in modo asincrono (Mia figlia suggerisce di fare un cavo/guinzaglio alla cui estremità del cavo possiamo metterci dei pulsanti che fanno partire le routine) o anche inserendo qualche sensore a piacere (lo vedremo nella successiva fase di costruzione) si potrebbe far riconoscere un palo (dove fermarsi per alzare le zampette) o un sensore di bagnato per la scrollata.
Questa è stata l’idea prototipo di base che mi ha portato a partecipare al contest.
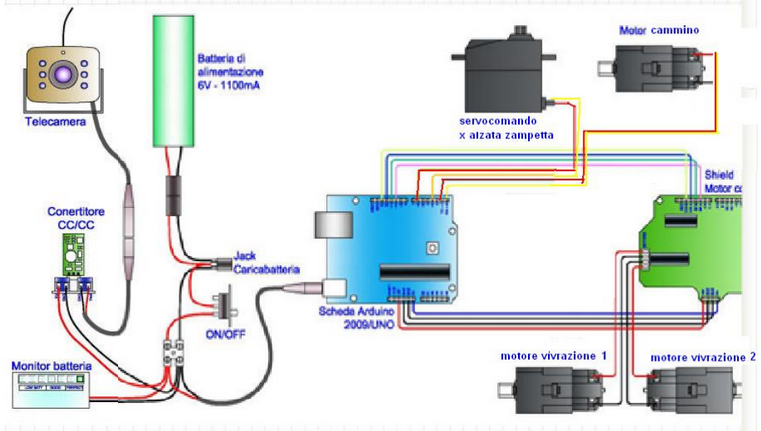
Ho poi cercato di trovare qualche ispirazione da chi ha una certa esperienza ed ho trovato davvero tanto (oltre ad una grande disponibilità al contatto) sul sito di Adriano (in particolare ho cercato ispirazioni da questo modello poichè a mia figlia piaceva molto l’idea di poter vedere sullo schermo con gli occhi del nostro cane!!) e mi son procurato anche una telecamera con trasmettitore. Alla fine lo schema dovrebbe essere qualcosa infatti molto simile a questa:

Ho quindi predisposto tutto e cercato di coinvolgere mia Figlia in questa fase di progettazione e poi nella successiva fase di costruzione ma… ben presto la piccola e suo fratello mi hanno iniziato a fare giustamente delle domande più basilari tipo che cosa fosse una scheda elettronica, cosa sono i suoi componenti come funziona un led o una lampadina, come un motore, un sensore, cos'è l’energia elettrica e in definitiva… l’elettronica.
Ho quindi realizzato che dovevamo iniziare da ancor prima con le spiegazioni, almeno se volevamo con questo progetto rispettare l’intento e l’obiettivo principale didattico di “coinvolgimento di giovani e i giovanissimi”!!
Allora in un negozio di materiale usato ho trovato un interessante libretto con dei moduli per esperimenti che abbiamo iniziato a sfogliare.
e ci siamo ripromessi che solo dopo aver fatto un po' di elettronica di base durante l’estate avremmo iniziato poi ad assemblare tutti i pezzi del nostro cane, realizzato fisicamente l’animaletto di cui al progettato/prototipo descritto e generato (adattando quanto si trova in questo fantastico mondo open source) gli sketch per il suo controllo e che comunque poi, ne avremmo fatti tanti altri, ogni volta migliorati e di dimensioni diverse (print 3D) con sensori differenti e movimenti altrettanto particolari proprio come i tanti che sono nell’area sgambatura del parco vicino casa!
…chissà se ce la faremo mai!!


Grazie per aver pubblicato questo articolo,Io e Maria Sofia siamo veramente contenti.
Volevamo scrivere qualcosa che potesse solo raccontare il nostro entusiasmo e il tentativo di coinvolgerci in questa avventura di conoscenza e sperimentazione.
Spero che ciò ci possa spronare ancora di più a realizzare il nostro progetto, ormai quasi del tutto definito.
buona fine di Agosto.
Ciao massimo
Ottimo articolo, attendiamo ora gli sviluppi!
Ti ringrazio poi della citazione mia e del mio sito.
Segnalo che per maggiori informazioni e per indicazioni della possibile modifica delle morsettiere della scheda motore, potete consultare la pagina del mio sito.
http://www.adrirobot.it/arduino/infineon_motor_Shield/infineon_motor_Shield.htm
Grazie acte Adriano.
Ho trovato molte informazioni interessanti nel tuo sito e, anche se non abbiamo ancora avuto modo di confrontarci concretamente, la tua pronta disponibilità ci ha incoraggiato molto ad andare avanti. Citare ció era il minimo che potessimo fare.
Grazie ancora, anche per questi link.
…. per la Giochi Preziosi .. … Noi siamo pieni di altre idee …. se volete contattarci .. possiamo trovare un accordo di collaborazione 🙂
https://www.youtube.com/watch?v=W6aW0zDFShM
[email protected]