
Anche i circuiti integrati ed i microcontrollori sono fonte di disturbo elettromagnetico, per questo valgono le regole di compatibilità elettromagnetica anche se su scala ridotta.
Ricordiamo brevemente che con ‘Compatibilità Elettromagnetica’ (EMC) intendiamo la capacità per un apparato di funzionare correttamente in presenza di interferenze elettromagnetiche senza subire malfunzionamenti o danni ed, a sua volta, non perturbare l’ambiente influenzando il normale svolgimento delle operazioni di altre apparecchiature. Un insieme di normative nazionali ed internazionali si preoccupa di quantificare i livelli massimi di emissione tollerati ed i livelli di suscettibilità per ogni campo applicativo, descrivendo in dettaglio anche le procedure di misura da impiegare. Superando i livelli definiti dalle normative è impossibile ottenere la certificazione di Compatibilità Elettromagnetica e di conseguenza non si può commercializzare il prodotto. Ricordiamo inoltre che l’analisi di qualsiasi problema di compatibilità elettromagnetica, dimostrato o presunto, comporta l’identificazione di tre enti coinvolti, la sorgente di energia elettromagnetica (aggressore), il meccanismo di accoppiamento e l’apparecchiatura o circuito esposti (vittima). Parlando di compatibilità elettromagnetica, il pensiero va ad antenne, radio, al rumore generato da motori elettrici o alimentatori a commutazione, alle sovratensioni e sovracorrenti generate da scariche elettrostatiche o da fulmini. Non è immediato associare tale concetto al funzionamento dei circuiti integrati, piccoli dispositivi contenuti nelle apparecchiature elettroniche che ormai ci circondano, caratterizzati a prima vista da basse tensioni e ridotte potenze in gioco. Vedremo in questo articolo come sia invece opportuno tenere in considerazione concetti di compatibilità elettromagnetica anche a livello di componente, naturalmente tenendo conto degli opportuni fattori di scala.
SORGENTI DI RUMORE NEI CIRCUITI INTEGRATI
Durante la progettazione, il debug e validazione della maggior parte delle applicazioni si lavora tipicamente nel dominio del tempo. I segnali vengono simulati e poi osservati nella loro evoluzione temporale, pensiamo alle misure con oscilloscopio. La forma dei segnali, la loro corretta sequenza, la posizione nel tempo rispetto ad altri segnali sono gli oggetti di indagine. Lavorando per la compatibilità elettromagnetica, dobbiamo invece preoccuparci di osservare cosa succede nel dominio delle frequenze e verificare se stiamo generando frequenze ed emettendo energia, in bande non indispensabili al funzionamento del nostro circuito o apparato. In altre parole, chiederci se stiamo “inquinando” lo spazio circostante disperdendo energia elettromagnetica. Per passare dal dominio del tempo al dominio delle frequenze è necessaria un po’ di matematica. Fourier ha dimostrato che qualsiasi segnale periodico può essere rappresentato come somma di segnali a frequenza multipla intera della fondamentale (armoniche), segnali presi con gli opportuni valori di ampiezza e fase. Rinviando la trattazione rigorosa ad altrettanto rigorosi libri di testo, qui ci serviremo invece di SPICE per visualizzare il comportamento in frequenza di segnali che ci sono probabilmente familiari nel dominio del tempo, prendere confidenza con l’occupazione dello spettro elettromagnetico che è loro proprio e trarne qualche considerazione. La figura 1 presenta un segnale di clock visualizzato in tensione, ad una frequenza di 20 MHz (fondamentale), frequenza non certo elevata di questi tempi. Questo potrebbe ad esempio essere il segnale clock-out disponibile in molti microcontrollori.
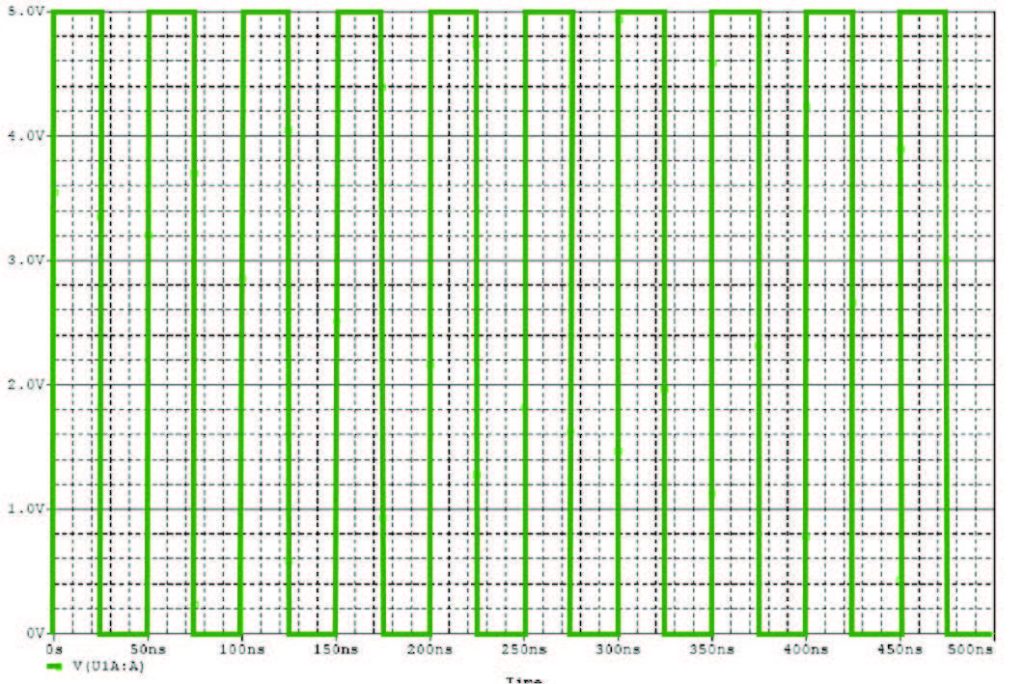
Figura 1: Clock 20MHz trise-tfall 1% del periodo.
Il segnale, teoricamente un’onda quadra, si presenta in realtà trapezoidale, per tenere conto dei tempi di salita e discesa non nulli, ma rappresentati da un realistico 1% del periodo. La rappresentazione in frequenza dello stesso segnale (spettro), calcolata per noi da SPICE, ci mostra in figura 2 come sia pur riducendosi progressivamente in ampiezza, componenti a frequenza molto più elevata della fondamentale siano presenti nello spettro.
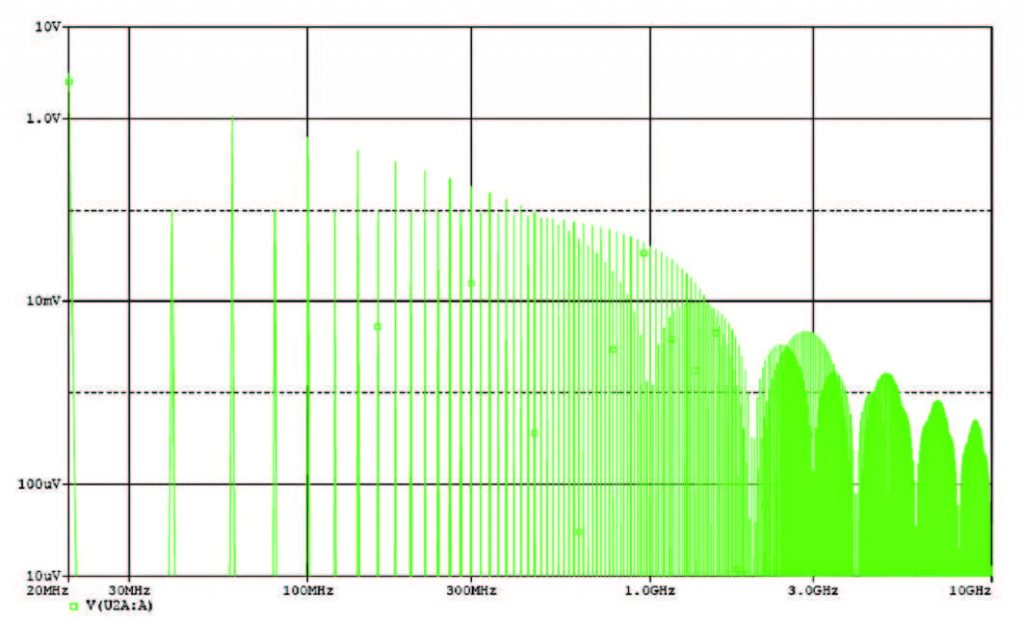
Figura 2: spettro in frequenza del segnale di figura 1.
Analoghe considerazioni si possono fare a proposito dei segnali rappresentati nelle figure 3, 4, 5. Si tratta di segnali PWM (impulsi modulati) con fondamentale a 20 kHz, tipica del controllo di motori in continua. La figura 3 presenta un segnale PWM con duty cycle del 50%, la figura 4 un segnale con duty cycle del 10%, la figura 5 un segnale con duty cycle del 90%. In tutti i casi osserviamo la presenza di componenti armoniche fino nella regione delle decine di MHz, pur partendo da una fondamentale di pochi kHz.
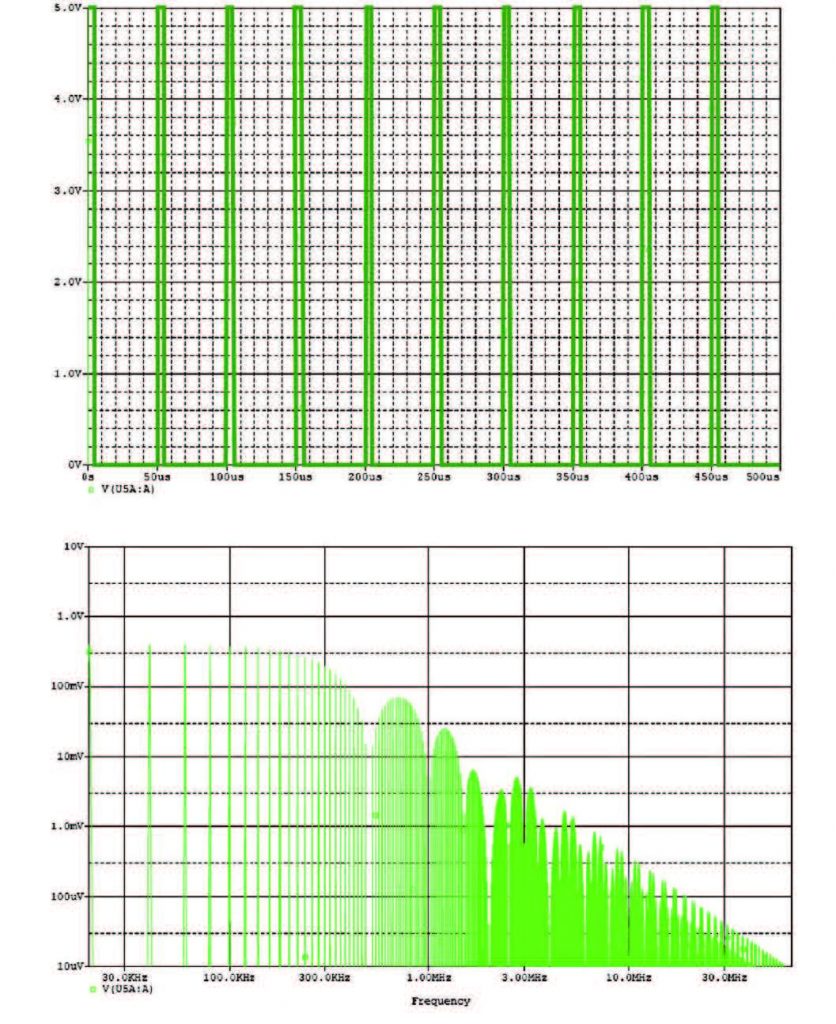
Figura 3: presenta un segnale PWM con duty cycle del 10%, la figura 4 un segnale con duty cycle del 50%.
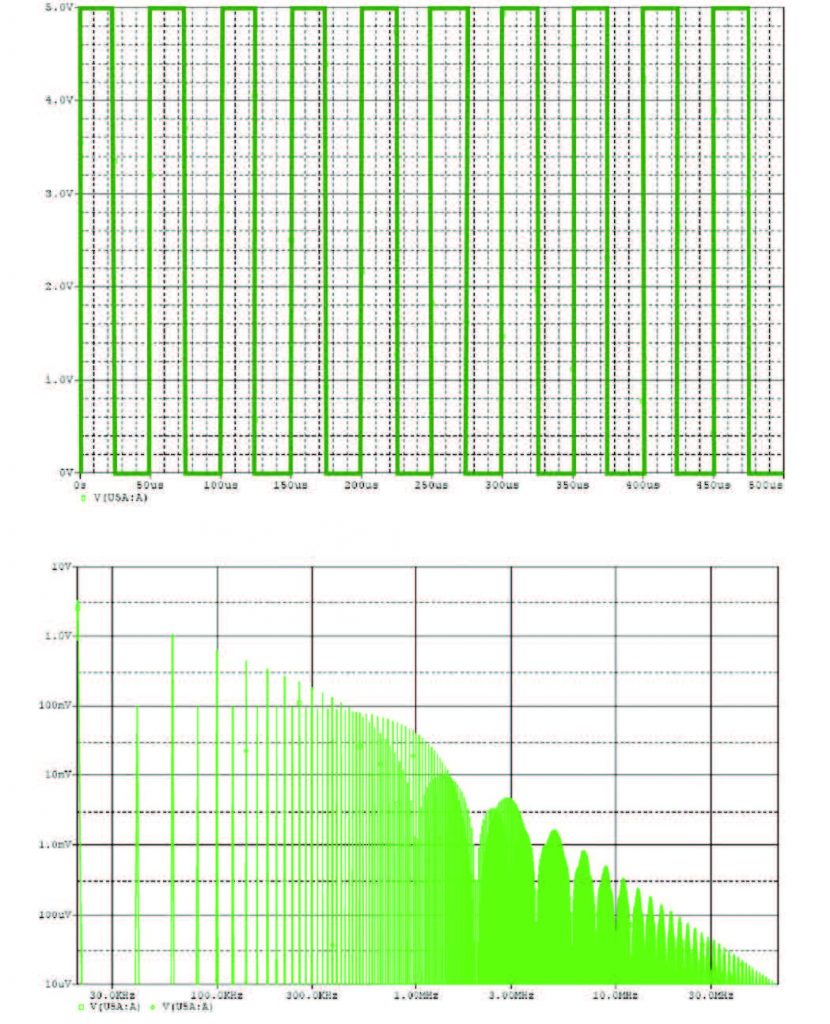
Figura 4: (a) Segnale PWM 20kHz Duty Cycle 50%; (b) Spettro in frequenza.
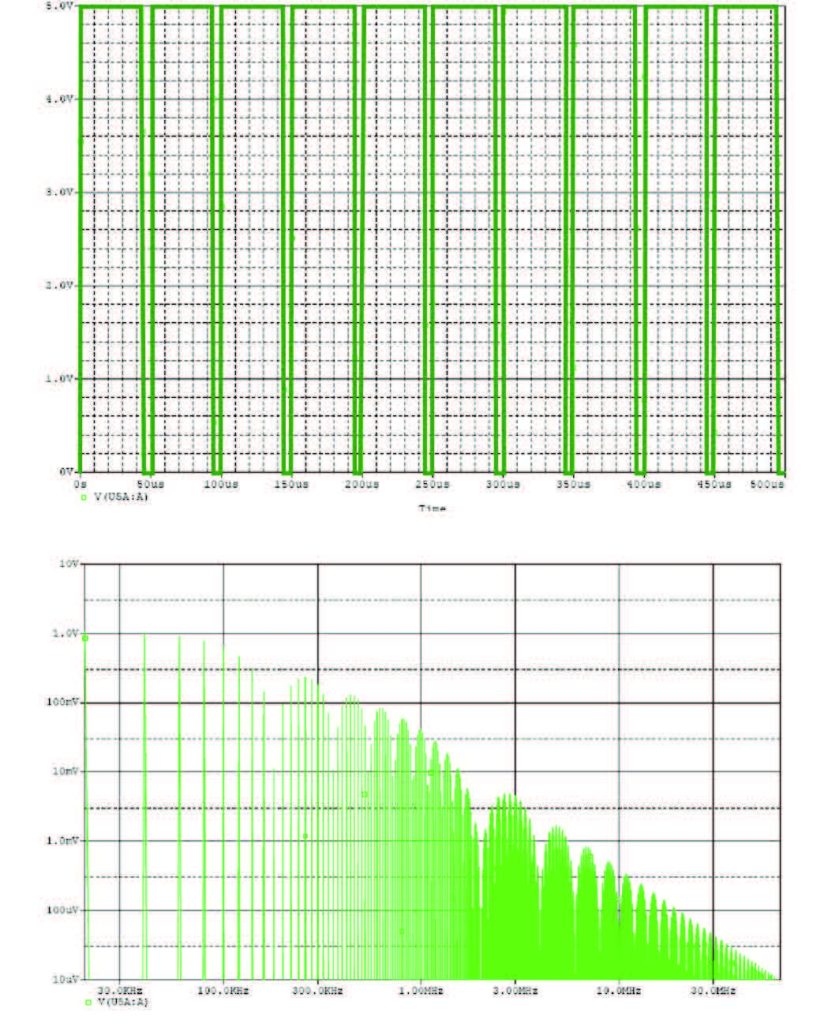
Figura 5: (a) Segnale PWM 20kHz Duty Cycle 90%; (b) Spettro in frequenza.
La figura 6a è probabilmente ancora più interessante, rappresentando il segnale di clock in tensione e la forma d’onda della corrispondente corrente assorbita dal circuito logico in esame. Sappiamo infatti che un circuito logico in tecnologia CMOS ha assorbimento praticamente nullo negli stati ‘0’ ed ‘1’ per assorbire invece corrente durante le transizioni tra uno stato e l’altro. Tale assorbimento è essenzialmente dovuto alla carica e scarica delle capacità di carico viste dai transistor MOS. Il consumo dovuto al leakage presentato dalle moderne tecnologie sub micrometriche, anche qualora non soppresso dalle precauzioni del costruttore, non cambia il discorso per quanto riguarda le emissioni elettromagnetiche come vedremo tra poco, trattandosi di un consumo in corrente continua. Osservando in figura 6b lo spettro corrispondente alla corrente triangolare, possiamo notare anche qui la ricchezza di contenuto armonico e l’estensione in frequenza. Vediamo quindi come sia l’alimentazione propria della logica che la generazione di segnali utili al resto della circuiteria componente l’applicazione, siano potenziali ‘inquinatori’ dal punto di vista elettromagnetico, se non correttamente trattati. Questo per quanto riguarda i circuiti digitali. Tipicamente i circuiti integrati analogici destinati ad elaborazione del segnale sono molto meno rumorosi, la vorando con segnali di livello inferiore e con transizioni meno ripide. Vedremo tra poco come questo possa non essere vero per la totalità dei circuiti analogici.
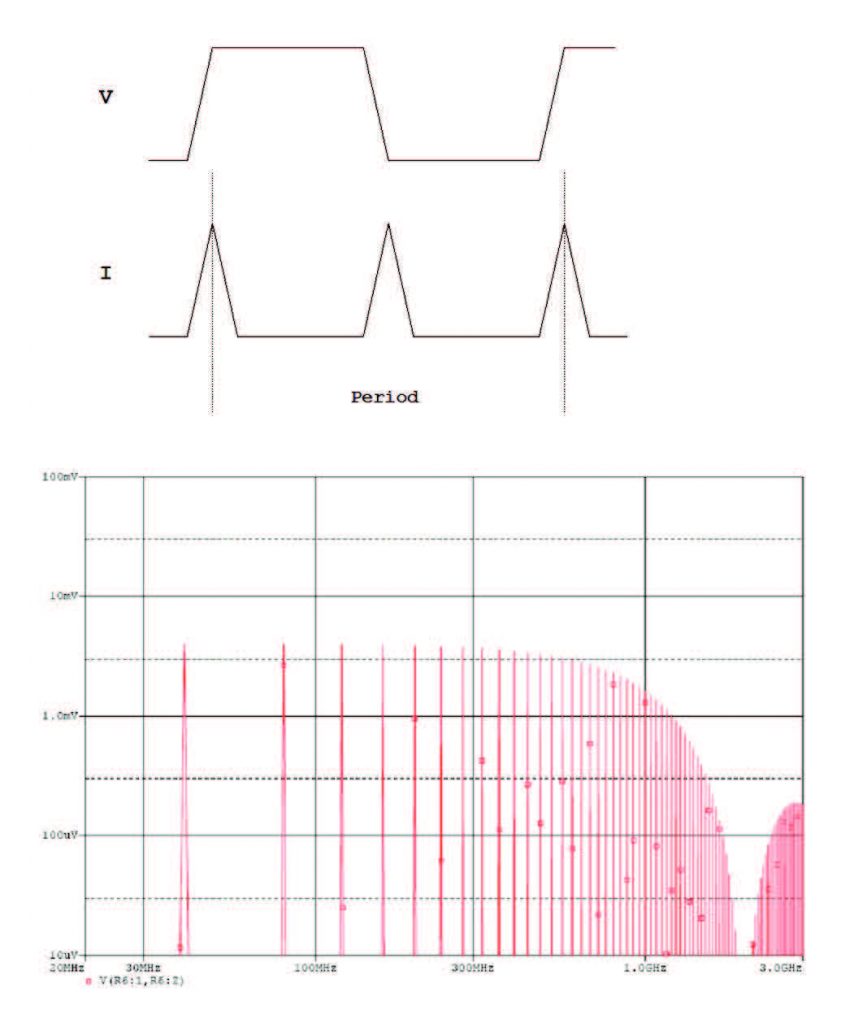
Figura 6: (a) Segnale di Clock a 40 MHz e consumo in corrente; (b) Spettro del segnale in corrente (misurato come caduta di tensione su shunt 1 ohm).
EMISSIONI
Cerchiamo ora di riconoscere anche i meccanismi di accoppiamento tra le emissioni prodotte da un circuito integrato ed il suo ambiente, in senso lato. Distinguiamo tre modi fondamentali.
# Emissione radiata diretta
# Emissione Condotta attraverso i collegamenti di alimentazione
# Emissione Condotta attraverso i collegamenti di segnale
Vediamoli in dettaglio, tenendo presente la figura 7 che rappresenta un semplice modello di un generico circuito integrato digitale.
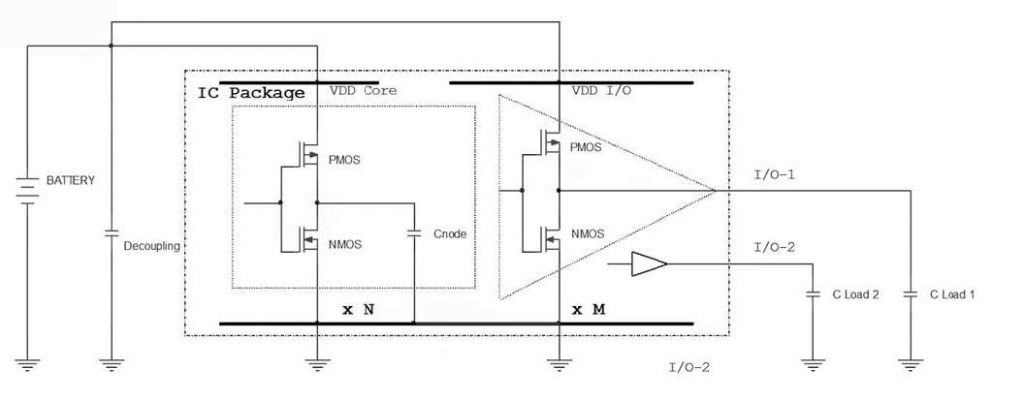
Figura 7: Modello semplificato di circuito integrato digitale.
L’inverter sulla sinistra rappresenta una gate generica appartente alla logica interna del dispositivo, la CPU ad esempio, nel caso di un microcontrollore. I circuiti logici digitali possono essere modellizzati come un gran numero di inverter con il proprio carico capacitivo costituito dalla capacità vista da ogni nodo interno (nell’ordine dei femtofarad, quindi piccolissima ma non nulla). Tipicamente questa circuiteria è alimentata a bassa tensione (tra 1V e 1,8V), in qualche caso attraverso un regolatore integrato nello stesso IC. Le linee di alimentazione e massa sono i soli terminali accessibili all’esterno del circuito integrato. L’inverter sulla destra rappresenta invece il buffer che pilota i pin esterni del circuito, con la capacità di carico costituita dalle tracce del circuito stampato e la capacità di ingresso degli altri integrati o cavi cui può essere connesso. Tipici valori di carico possono andare dai 10pF ai 150pF. L’alimentazione in questo caso più elevata, dovendo alimentare carichi maggiori, oggi compresa tipicamente tra 1.8V ed i 5V. Il modello è molto semplificato per chiarezza espositiva. Per una qualsiasi analisi circuitale, tutti i collegamenti, rappresentati come ideali, vanno invece sostituiti con la propria induttanza, per piccola che sia. L’uscita I/O-1 è supposta commutare ad una data frequenza, I/O-2 rappresenta un pin adiacente statico, ad un livello logico fisso.
EMISSIONE RADIATA DIRETTA
Questo modo di emissione trae origine da concetti fondamentali dell’elettromagnetismo, reperibili in molti buoni testi di fisica ed elettrotecnica, in Rif.1 il mio preferito. Correnti variabili creano nello spazio circostante un campo magnetico ed un campo elettrico variabili. Questi campi sono a loro volta in grado di indurre tensioni in conduttori in esso immerso e di propagarsi nello spazio circostante. Nel nostro caso, le correnti impulsive circolanti nelle sottili metallizzazioni che costituiscono i conduttori interni del circuito integrato, ad ancor di più, i fili di connessione tra il chip ed i pin esterni del package ed i pin stessi, creano un campo elettrico e magnetico intorno ai conduttori che attraversano, quindi nello spazio circostante i circuiti integrati in oggetto. Le strutture metalliche ora viste, completate dal circuito di ritorno delle correnti in gioco, costituiscono in altre parole tante piccole antenne ad anello (loop antenna). Perché un’antenna sia efficace, la sua lunghezza deve essere pari ad almeno un quarto della sua lunghezza d’onda. Allontanandosi da tale lunghezza l’efficienza di emissione diminuisce. La lunghezza d’onda in metri si può calcolare come rapporto tra 300 e la frequenza espressa in Megahertz. Considerando le dimensioni di un circuito integrato, e le lunghezze d’onda ad esse associate, comprendiamo che difficilmente l’emissione diretta dal circuito integrato sarà causa di problemi di interferenza. Le tensioni e correnti indotte nel circuito stampato e tutti gli altri conduttori circostanti (pareti di contenitori metallici, cavi, flat-cables, dissipatori) andranno però ad aumentare il rumore ad alta frequenza complessivo dell’apparecchiatura. Il rumore complessivo su massa, alimentazione, segnali, si comporta come generatore di correnti ad alta frequenza nei confronti di fili e cavi che lasciano il PCB. Avendo questi lunghezze che possono diventare significative frazioni o multipli della lunghezza d’onda, si può venire a creare una sorgente di emissioni sufficienti a far fallire i test di conformità. In altre parole, il nostro Circuito Integrato può essere fonte di problemi indirettamente, anche se la sua emissione diretta non è in grado di creare problemi. Particolarmente subdolo può rivelarsi il comportamento radiante di un dissipatore di calore, che a sua volta può assumere dimensioni significative nei confronti della lunghezza d’onda delle frequenze in gioco. Questo meccanismo di emissione è chiamato interferenza radiata proprio perché sostanzialmente analoga alla generazione di onde elettromagnetiche irradiate da un’antenna. La fondamentale differenza è che siamo qui in presenza di un fenomeno parassita indesiderato, invece che una intenzionale trasmissione di segnale utile. Il livello di emissione nelle immediate vicinanze della sorgente (Near Field), cresce al crescere della frequenza dei segnali in gioco, in termini matematici è proporzionale al quadrato della frequenza.
EMISSIONE CONDOTTA ATTRAVERSO I COLLEGAMENTI DI ALIMENTAZIONE
Le correnti impulsive introdotte nel paragrafo precedente sono solo parzialmente smorzate dalle capacità intrinseche o intenzionalmente integrate nei Circuiti Integrati. Esse circolano nei collegamenti di alimentazione interni ed esterni e sul PCB da/verso alimentazione e massa. I condensatori di decoupling costituiscono un fondamentale presidio per smorzarne il livello, creando riserve locali di carica cui attingere per soddisfare il fabbisogno durante le ripide transizioni della logica. Contemporaneamente all’emissione radiata, abbiamo qui anche una propagazione di emissione condotta, cioè una tensione variabile ad alta frequenza indesiderata sovrapposta ai conduttori fino alla sorgente di alimentazione in continua. Notare che il consumo di corrente continua non ha alcuna influenza sui fenomeni EMC che stiamo considerando. Questo tipo di emissione viene anche spesso indicato con i termini di IR-Drop o Delta-I Noise, a sottolineare la caduta di tensione provocata e il rumore dovuto a repentine variazioni di corrente. Eccessivi livelli di rumore possono essere nocivi per il funzionamento dello stesso integrato, portando sia pur per brevi istanti, la logica a lavorare al di sotto della tensione di alimentazione minima garantita con possibili errori logici dovuti a violazioni interne dei tempi di setup (livello insufficiente al momento del campionamento del segnale).
EMISSIONE CONDOTTA ATTRAVERSO I COLLEGAMENTI DI SEGNALE
Analogamente, è possibile e particolarmente nociva, l’emissione condotta sovrapposta a linee di segnale, cioè i pin funzionali del circuito integrato. L’origine può essere molteplice in questo caso, derivante da accoppiamenti capacitivi o induttivi con il rumore delle alimentazioni del core o derivante da fluttuazioni prodotte nell’alimentazione degli stessi I/O da commutazioni di altre uscite appartenenti al medesimo dominio di alimentazioni. E’ anche possibile avere rumore dovuto a Crosstalk (diafonia) con pin adiacenti in commutazione (I/O-2 del nostro modello), quindi induzione di tensioni sul pin statico, in corrispondenza delle transizioni di livello logico del pin in commutazione. Mentre il rumore condotto sulle alimentazioni viene filtrato dall’aggiunta di condensatori di decoupling (e/o più costose e problematiche induttanze), più difficile e costoso risulta filtrare le singole uscite di segnale. Oltre al numero di linee da trattare molto maggiore, occorre qui preservare le caratteristiche dinamiche del segnale in uscita, questo riduce molto il margine di manovra. Inoltre le connessioni esterne ad esempio, linee di comunicazione, con le loro lunghezze misurabili facilmente in metri, possono costituire buone, involontarie, antenne in bande di frequenza sensibili quali quelle usate per radiocomunicazioni. Notiamo che i circuiti integrati analogici destinati al comando di attuatori, alimentatori switching e simili, essendo sede di correnti transitorie di valore anche elevato, possono costituire generatori di emissioni con modalità simili a quanto visto per i circuiti digitali ed effetti ancor più significativi.
SUSCETTIBILITÀ
La suscettibilita` indica la predisposizione al malfunzionamento di un componente o sistema, dovuta a tensioni o correnti generate da interferenze elettromagnetiche. Anche in questo caso possiamo distinguere tra grandezze elettriche transitorie anomale radiate nello spazio o condotte, propagate lungo i collegamenti elettrici di segnale o alimentazione. Una categoria particolare e molto importante di disturbi elettrici è costituito dalle scariche elettrostatiche (ESD), molto comuni e quindi da trattare con attenzione. L’argomento è già stato introdotto sulla rivista ‘Fare Elettronica’ (vedi Rif. 3) e non ci dilungheremo ulteriormente qui. L’effetto di segnali elettrici anomali puo` essere molto vario. Si possono creare malfunzionamenti temporanei, risolvibili con un reset del microcontrollore vittima, reset magari autogenerato dalle precauzioni prese nella progettazione (watchdog). Il circuito più delicato in un’applicazione sincrona è sicuramente l’oscillatore che genera il clock di sistema. Segnali sovrapposti possono portare alla cancellazione o distorsione di un periodo di clock o all’inserimento di clock spuri. In entrambi i casi, l’applicazione è esposta al rischio di errori logici dovuti alla violazione dei tempi di setup ed hold. Ingressi come il pin di reset e gli interrupt esterni potrebbero essere attivati senza ragione da interferenze di sufficiente ampiezza, portando il programma in situazioni di crash, recuperabili appunto con un reset. Naturalmente, la tollerabilita’ di questa situazione va analizzata in funzione della frequenza con cui il fenomeno si presenta e l’effetto sull’applicazione. Un controllo automatico destinato alla regolazione di processi fisici lenti, quali un climatizzatore ambientale, tollerera’ periodi di “cecita’“ molto meglio che un regolatore della velocita’ di un motore elettrico. L’acquisizione e conversione di dati analogici potrebbe restituire un dato digitale completamente errato, qualora acquisito con la sovrapposizione di un disturbo. In casi più seri, l’ampiezza del disturbo può essere tale da innescare fenomeni di latch-up potenzialmente distruttivi e risolvibili solo con la temporanea interruzione di alimentazione. Ampiezze ancora maggiori possono causare danni permanenti. Mentre è auspicabile una intrinseca robustezza del circuito integrato, è impossibile pensare che da solo possa resistere ad effetti tanto catastrofici. Protezioni esterne andranno quindi previste per riparare dai fenomeni più energetici. I circuiti integrati digitali manifestano una buona resistenza alle interferenze grazie agli elevati livelli di tensione con cui lavorano. I componenti CMOS tollerano rumore sovrapposto al segnale utile con ampiezza nell’ordine del 30% della tensione di alimentazione (noise margin). I componenti analogici si rivelano invece molto piu` sensibili, essendo il segnale utile da essi elaborato spesso di valore molto piccolo. Le interferenze si manifestano come segnale spurio sovrapposto e del tutto indistinguibile dal segnale che si vuole elaborare.
PERCHÉ PREOCCUPARCI DI EMC?
Sia le emissioni che la suscettibilità dipendono da fattori strutturali e costruttivi, come abbiamo in parte già visto. I livelli di emissione elettromagnetica dipendono sostanzialmente dai fattori seguenti:
- intensità delle correnti ad alta frequenza in gioco
- ripidità dei fronti di salita e discesa dei segnali
- frequenza dei segnali
- accoppiamenti conduttivi, induttivi e capacitivi parassiti
- natura dei materiali impiegati dimensioni fisiche
- presenza di strutture conduttive, intenzionali o meno, in grado di comportarsi come antenne (loop antenna).
L’immunità (suscettibilità) dipende inoltre dai margini di rumore tollerato, propria ad esempio ad ogni tecnologia digitale integrata. Quasi tutti questi parametri sono,almeno in parte, sotto il controllo del progettista, qualora considerati nelle fasi di impostazione del progetto, ma costituiscono caratteristiche costruttive intrinseche all’applicazione e quindi sostanzialmente non modificabili a posteriori, una volta costruito il prototipo o la pre-serie. Intervenire a posteriori sarà quindi costoso in termini di ritardi introdotti nella commercializzazione del prodotto e nel rifacimento di hardware, cablaggi, meccanica. Con maggiore o minore severità, tutte le apparecchiature hanno oggi obbligo di ottenere una certificazione di aderenza a normative EMC nazionali ed internazionali, per poter essere poste in commercio. Queste sono le fondamentali ragioni per preoccuparsi di EMC a tutti i livelli del progetto. Osservando la varietà e quantità di apparecchiature elettroniche presenti in una moderna automobile, nelle nostre case o nei posti di lavoro, ci rendiamo conto della necessità di garantire la coesistenza di oggetti sempre più complessi e funzionanti a frequenze sempre più elevate. Questo è lo spirito delle normative cui facevamo cenno. Altra buona ragione è dovuta al fatto che purtroppo correnti relativamente piccole, poche decine di microampere, possono rivelarsi sufficienti a superare i limiti imposti dalle normative per la commerciabilità del prodotto. Una certa cura va quindi riservata durante tutto il processo di sviluppo di nuovi prodotti ed in particolare alla scelta dei componenti ed alla progettazione dei circuiti stampati.
DATI REPERIBILI A PROPOSITO DI EMC IC
I livelli di emissione e di suscettibilità non sono ancora riportati sistematicamente nei datasheet dei circuiti integrati, anche se si iniziano a trovare, in particolare per componenti destinati ad applicazioni particolarmente critiche dal punto di vista EMC, come l’elettronica per auto. I livelli dichiarati sono ottenuti a livello componente, misurati secondo normative internazionali SAE1752 o IEC61967. Poiché non è possibile stimare le prestazioni EMC del componente isolato, la scheda utilizzata nelle misure ed il software in esecuzione sono oggetto di specifiche indicazioni da parte delle normative, in modo da costruire un ambiente di riferimento il più possibile simile tra i diversi dispositivi e le possibili applicazioni. Malgrado il molto lavoro fatto negli ultimi venti anni in materia (vedi Rif. 2), restano molti problemi aperti. Anzitutto, basse emissioni ed elevata immunità costituiscono sempre più un vantaggio competitivo per il produttore di componenti verso i suoi concorrenti. Buone performance EMC si traducono infatti in schede applicative complessivamente meno costose, a parità di altre prestazioni (meno filtri, schermi, ferriti eccetera). Questo fa si che nella maggior parte dei casi i risultati delle misure e test condotti secondo SAE/IEC non siano di pubblico dominio, ma ottenibili solo con contatto diretto con la casa produttrice e previa sottoscrizione di documenti con valore legale, a garanzia della riservatezza e non ridistribuzione dei dati ricevuti (documenti chiamati NDA, Non Disclosure Agreement). Non c’è nessun problema in questo per grandi aziende, in grado di avere contatti diretti, potendo garantire grossi volumi, mentre può essere più complesso avere accesso a tali dati da parte di tutti gli altri. Una volta ottenuti i dati di misura, la loro interpretazione e valutazione nei confronti della propria applicazione finale è comunque tutt’altro che semplice, in mancanza di esperienza precedente e risorse interne in grado di correlare i dati o servirsene per completare ambienti di simulazione. Le misure sono infatti eseguite intenzionalmente a livello componente, come richiesto dalle normative e suggerito dal buon senso, e non possono da sole garantire a priori i livelli EMC dell’applicazione finale. Esistono vari studi circa la correlazione tra performance EMC a livello componente (IC) a livello applicazione (PCB e suo contenitore) ed infine a livello sistema completo (es. automobile). Anche in questo caso occorrono però risorse non indifferenti da dedicare allo studio e spesso si tratta di iniziative pilota, ancora lontane dall’essere praticamente utilizzabili dal progettista medio. Il prossimo paragrafo cerca di rispondere alla legittima domanda che tutti noi ci facciamo a questo punto, di fronte al complesso e poco amichevole ambiente delineato finora, cioè cosa fare praticamente, assumendo che vogliamo considerare la Compatibilità Elettromagnetica come uno dei vincoli nei nostri progetti ed operiamo in ambiti con ridotte esperienze e risorse investibili in questo ambito.
EMC IC NEI NOSTRI PROGETTI
Come abbiamo visto nel paragrafo ‘Perché preoccuparci di EMC?’, emissioni e suscettibilità dipendono da parametri fisici e costruttivi dell’oggetto in questione e per questo risulta costoso,in qualche caso impossibile, rimediare a posteriori. Le performance EMC devono quindi essere prese in considerazione fin dall’inizio del progetto, fin dalla scelta dei componenti. Se avete avuto la pazienza di leggere fino qui, siete già sulla strada giusta, dimostrando di avere acquisito la giusta sensibilità per la materia. Livelli di emissione e suscettibilità dovrebbero essere considerati nella scelta ad esempio del microcontrollore da adottare, insieme a tutti gli altri parametri che guidano la selezione (capacità di elaborazione, dotazione di periferiche, consumo, costo componente, costo di sistema, sistemi di sviluppo, dotazione di librerie sw, precedenti esperienze acquisite ecc…). Privilegeremo nella scelta componenti di cui siano disponibili nel datasheet o come rapporti separati, i dati di emissione e suscettibilità, questo indica se non altro, una speciale sensibilità del costruttore in materia EMC. In assenza di questi, osserveremo la disponibilità di Application Notes dedicate al controllo delle performance EMC del componente di nostro interesse. Se non vi sono Application Notes dedicate al singolo componente, analizzeremo le AN dedicate al progetto hardware o le cosiddette “Getting Started with…”. Normalmente comprendono suggerimenti circa le precauzioni da prendere per minimizzare le emissioni e ridurre la suscettibilità. Cercheremo poi Application Notes non specifiche ma dedicate ad una tipologia di componenti (es. microcontrollori). Sia nel caso di fallimento delle ricerche descritte, sia nel caso qualche documento venga trovato, può risultare utile prendere contatto online con il supporto tecnico del costruttore, tipicamente accessibile dal sito web principale. Una email che descrive brevemente chi siete, quale componente volte utilizzare, quale applicazione intendete farne e, informazione gradita, quanti pezzi pensate di acquistare per anno di produzione, vi potrebbe aprire le porte a una piccola consulenza gratuita e personalizzata capace di fornirvi qualche dritta. Ricordate che voi ed il supporto tecnico del fornitore (Application Engineering) avete alcuni interessi in comune. Entrambi volete evitare problemi nell’applicazione in modo che il cliente finale sia soddisfatto (vostro interesse) e continuare ad acquistare i medesimi componenti (interesse del vostro interlocutore). Una volta ottenuti informazioni e consigli attraverso i canali suggeriti, spetta ovviamente solo a voi implementarli al meglio nella vostra applicazione, applicando il mix di compromessi tra esigenze diverse e spesso contrapposte che costituisce il cruccio quoti diano di ogni progettista. A complemento di quanto sopra, conviene adottare alcune regole base, sempre valide in campo EMC:
- Adottare componenti con frequenze di funzionamento leggermente maggiori della frequenza operativa di vostro interesse, senza sovradimensionamenti eccessivi. In altre parole, usate sempre i componenti più “lenti” compatibili con le vostre esigenze.
- Ricordare che i tempi di salita e discesa dei segnali sono ancora più importanti della frequenza operativa. Anche qui non largheggiate, se possibile, e mettete in campo precauzioni atte a limitare la ripidità dei fronti. Piccoli resistori in serie alle linee di selezione, indirizzo, dato di un’interfaccia di memoria, possono rivelarsi molto efficaci in tale lavoro. Notate che ci sono alcune severe controindicazioni, il costo dei componenti aggiuntivi ed il fatto che normalmente vengono pubblicati i valori massimi (worst case) dei tempi di transizione, difficilmente i valori minimi, considerati best case ma di nostro maggior interesse in questa sede. Di nuovo, la completezza del datasheet costituisce fattore discriminante. Ovviamente ci sono anche vincoli funzionali, in una interfaccia di memoria non siamo liberi di “arrotondare” a piacere i segnali tra microprocessore e memoria, pena errori di lettura/scrittura, magari intermittenti.
- Osservate la vostra applicazione e di videtela in blocchi in funzione delle frequenze operative. Nel layout della vostra circuiteria tenete lontani i circuiti sensibili (es. analogici a basso livello) ed i connettori di ingresso/uscita dai blocchi a maggior frequenza.
- Curare il percorso di ritorno di ogni segnale veloce (impropriamente chiamato “massa”) tanto quanto il polo caldo del segnale stesso.
- Progettare la distribuzione di alimentazione ed il relativo decoupling con cura e come prima parte del vostro layout, evitate di “far passare l’alimentazione dove si può” dopo aver posizionato i segnali. Possibilmente utilizzate almeno una coppia di piani di alimentazione e massa adiacenti con distanza minima possibile per sfruttarne la capacità distribuita intrinseca.
- Seguire le indicazioni su tipologia e numero di condensatori di decoupling, non risparmiate proprio in questo campo, riducendone il numero o accettando compromessi sulla loro qualità.
- Applicare con scrupolo le regole di layout suggeritevi dal costruttore, ma dopo esservi assicurati di comprendere bene la ragione dietro ciascuna di essa. Interi libri sono stati scritti circa la realizzazione di PCB e probabilmente si potrebbe realizzare una collezione di “EMC Guidelines”. L’argomento è troppo vasto per essere analizzato qui, potremmo ritornarci sopra con un articolo dedicato, qualora venga dimostrato interesse per l’argomento.
- Mantenere separati i ritorni di segnali logici o analogici dai ritorni di potenza quali comandi di motori, elettrovalvole, relè e simili.
- Cercare di lavorare con le tensioni di alimentazione maggiori possibili, per garantirvi più elevati margini di immunità al rumore. Notate che questo aumenta l’immunità del circuito ma anche il livelli di emissioni. Occorrerà quindi decidere se nella specifica applicazione siano più critici l’uno o l’altra.
- Avere cura del layout del vostro generatore di clock, spesso costituito da un oscillatore a cristallo. Mantenete il layout compatto ed evitate che la sua area sia attraversata da altri segnali, specie se ad alta frequenza.
- Prevedere nel layout l’inserimento di componenti di filtro opzionali. Risulta più semplice lavorare “per sottrazione”, eliminando o non montando componenti che aggiungerne a posteriori dove non sia stato previsto il footprint opportuno. Identificate le zone critiche e limitatevi a lavorare su queste, ovviamente per evitare sprechi di spazio sul PCB e complicazioni inutili. Zone dove conviene intervenire sono le alimentazioni di porzioni critiche quali oscillatori, circuiterie analogiche, convertitori analogico-digitali e le linee di ingresso ed uscita soggette a commutazioni veloci. L’ingresso alimentazione delle apparecchiature alimentate dalla rete sono anche punti da tenere in considerazione per la possibile l’installazione di filtri.
EVOLUZIONI FUTURE
Le tendenze visibili sono essenzialmente le seguenti: aumentare, seppur faticosamente, la disponibilità di dati di Compatibilità Elettromagnetica dei componenti. Rendere disponibili modelli di emissione e suscettibilità dei componenti da usare nei simulatori circuitali per ottimizzare le performance anche sotto questo profilo, prima della costruzione fisica dei prototipi o pre-serie. Lavori sono in corso ad esempio, per estendere in tal senso i modelli IBIS (vedi Rif. 4), ormai di uso abbastanza diffuso nella simulazione del comportamento elettrico dei circuiti di ingresso-uscita (Signal Integrity). Anziché considerare separatamente Signal Integrity, Power Integrity ed EMC, si tende a mettere a punto metodologie di progetto e strumenti in grado di fornire una visione integrata e coerente di materie separate più da differenti evoluzioni storiche e sensibilità, che dalla fisica di base. Per quanto riguarda la suscettibilità, purtroppo non ci sono buone notizie. La tendenza a ridurre la tensione di alimentazione, imposta dall’esigenza di ridurre la potenza dissipata, erode anche il margine di rumore, rendendo le tecnologie più moderne meno robuste verso le interferenze. Questo aspetto andrà quindi seguito con crescente attenzione.

La tecnica spread spectrum applicata sul segnale di clock può alleviare i problemi di compatibilità EM.