Scegliere tra regolatori lineari e switching per l’alimentazione dei circuiti RF.
Il progetto della sezione di alimentazione dei circuiti RF è sempre un aspetto delicato, in quanto intervengono considerazioni di diversa natura che vanno dalle dimensioni del circuito, che devono essere ridotte, agli aspetti di efficienza, soprattutto nelle applicazioni con alimentazione a batteria, fino ai problemi di compatibilità ed interferenza elettromagnetica. Di seguito sono riportate alcune considerazioni che possono aiutare a scegliere la soluzione che meglio si adatta alla particolare applicazione.
REGOLATORI LINEARI: PICCOLI MA CON POCA EFFICIENZA
Dal punto di vista della complessità del circuito e, quindi, del numero di componenti e dei costi di produzione, la soluzione spesso più conveniente è rappresentata dall’utilizzo di regolatori lineari. Un regolatore lineare, da un punto di vista di principio, funziona come una resistenza variabile (in pratica un transistor in regione lineare) che regola la caduta di tensione ai suoi capi in funzione della corrente assorbita dal carico e della tensione d’ingresso così da assicurare un valore costante sulla linea di uscita. I vantaggi principali, oltre alla già citata semplicità del circuito (in figura 1 è mostrato lo schema di un regolatore con tensione di uscita programmabile), sono l’assenza di ripple della tensione di uscita ed una buona capacità di reiezione del rumore sulla linea di ingresso.
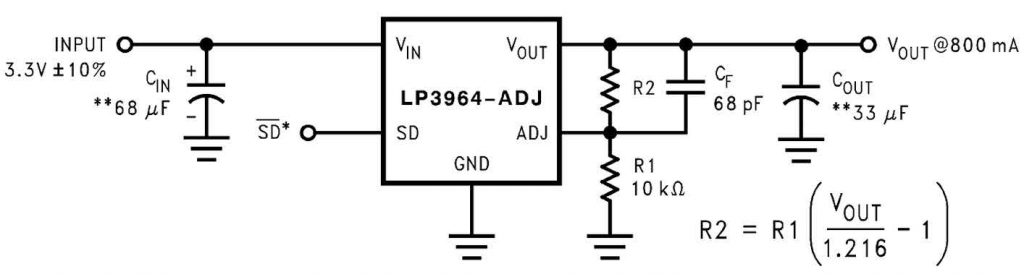
Figura 1: schema di un regolatore lineare con tensione di uscita configurabile.
Lo svantaggio principale è però quello di una ridotta efficienza. Parte della potenza assorbita alla sorgente viene dissipata proprio dal regolatore a causa del suo funzionamento in regime lineare. L’efficienza si può infatti esprimere mediante la seguente relazione:
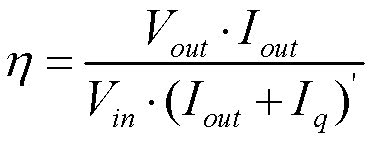
dove Iout è la corrente di carico mentre Iq la corrente ‘quiescente’ assorbita dal dispositivo per il suo funzionamento. Se la corrente di carico è molto maggiore della corrente ‘quiescente’ del regolatore, l’efficienza si può esprimere semplicemente come rapporto della tensione di uscita e di quella d’ingresso. In una tipica applicazione con alimentazione a batteria mediante singola cella a ioni di litio con tensione d’ingresso, quindi, di 3.0V e tensione di carico di 1.8V, ad esempio, l’efficienza del regolatore è solo del 60%. La bassa efficienza comporta la necessità da parte del regolatore di dissipare mediante calore valori elevati di energia, costringendo in alcuni casi ad accorgimenti per il raffreddamento del circuito. Inoltre, i regolatori lineari hanno bisogno di una minima differenza di tensione tra ingresso e uscita (tale differenza è indicata con il termine dropout) per poter funzionare correttamente; maggiore è il dropout minino, minore è evidentemente la massima efficienza che può essere raggiunta. Questo comporta che, nel caso di alimentazione a batteria, poiché la tensione di uscita si riduce con il livello di carica della pila, i regolatori lineari potrebbero non essere in grado di assorbire completamente l’energia disponibile nella cella. Per questo nella maggior parte dei casi sono selezionati regolatori lineari LDO (Low Drop Output), ovvero in grado di lavorare con dropout ridotto. Alcuni regolatori realizzati mediante FET a canale p possono operare anche con dropout fino a 35 mV.
CONVERTITORI SWITCHING: ELEVATA EFFICIENZA MA ATTENZIONE AL RIPPLE
Se nella nostra applicazione l’aspetto principale da considerare è l’efficienza, è indubbio che i migliori risultati si ottengono con convertitori DC/DC switching, altrimenti noti con il termine SMPS (Switched Mode Power Suppy). Il principio di funzionamento di tali dispositivi è legato alla commutazione continua di elementi capacitivi e induttivi; nel limite ideale, durante il periodo di on tali elementi assorbono dalla sorgente potenza che erogano al carico durante il periodo di off. In questo modo l’efficienza del circuito, sempre nel limite ideale in cui la resistenza degli elementi capacitivi e induttivi sia nulla, è prossima al 100%. Diversamente dai regolatori lineari, i convertitori switching sono inoltre in grado di derivare tensioni di alimentazione per il carico maggiori della tensione di ingresso. Nel caso di alimentazione a batteria, questo comporta la capacità di lavorare con celle con livelli di carica inferiori a quelli accettabili per regolatori lineari, oltre alla possibilità di ridurre il numero di celle in serie necessarie per l’alimentazione del circuito. I convertitori switching possono essere realizzati sulla base di diverse topologie che presentano ognuna vantaggi e svantaggi. Nel caso di applicazioni RF, per ridurre le dimensioni del circuito, si adottano tipicamente configurazioni non isolate del tipo buck, boost o buck-boost, come mostrato in figura 2. I convertitori buck, ad esempio, (figura 2a) lavorano con una tensione di uscita minore della tensione d’ingresso ed hanno una efficienza tipicamente compresa tra l’80% ed il 90%; i convertitori boost (figura 2b), invece, consentono di derivare una tensione maggiore di quella di ingresso con efficienza fino al 70%. Le configurazioni buck-boost, evidentemente, possono funzionare in entrambe le condizioni.
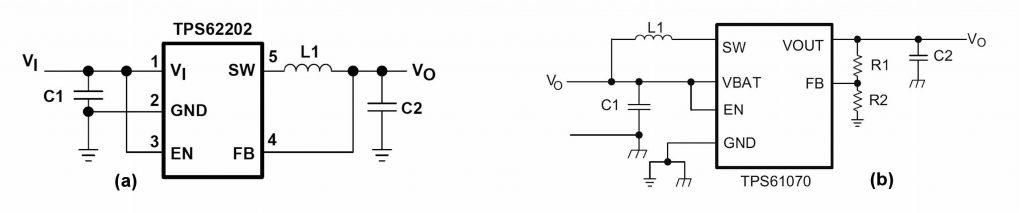
Figura 2: schema di convertitori switching di tipo buck (a) e boost (b).
I convertitori buck e boost, come si diceva, sono di tipo non isolato in quanto non utilizzano un trasformatore per disaccoppiare il circuito di ingresso da quello di uscita e si basano su un induttore immagazzinare la potenza richiesta dal carico. Esistono, però, anche topologie del tipo non isolato (come ad esempio le configurazioni flyback, for ward o push-pull) e quasi-risonante. Nel caso dei convertitori switching l’efficienza può essere calcolata sulla base della seguente relazione:
avendo adottate le stesse notazioni usate in precedenza. Come si vede, la corrente quiescente non può essere trascurata come fatto per i regolatori lineari ma influirà sull’efficienza del convertitore, unitamente al rapporto delle tensioni d’ingresso ed uscita. Nella pratica, i costruttori forniscono tipicamente dei grafici che riportano l’andamento dell’efficienza in funzione della corrente di carico e delle tensioni di lavoro. Supponendo che la corrente del carico vari nel tempo in funzione delle diverse modalità operative, l’efficienza media potrà infine essere calcolata mediante la relazione
dove la sommatoria si intende estesa ai diversi modi operativi considerati, Ii è la corrente assorbita in ognuno di essi e ti la loro durata; i rappresenta invece l’efficienza del convertitore alla corrente di carico Ii. In [1] è riportato un esempio di calcolo dell’efficienza per il convertitore TPS62200 di Texas Instrument quando utilizzato per alimentare il transceiver CC2500 (operante a 2.4 GHz e che richiede una tensione di core di 1.8 V). Le condizioni operative assunte sono quelle di alimentazione a batteria mediante cella con tensione di uscita a 3.6V, cycle-time di 1 s per il transceiver e duty-cycle dell’1%. Si noti che, nel calcolare l’efficienza media, si deve tener conto dei diversi assorbimenti di corrente richiesti (e quindi delle diverse efficienze esibite del convertitore) nella fase operativa del circuito e durante i periodi di tempo necessari all’inizializzazione dell’oscillatore interno ed alla transizione dallo stato di Idle a quello, appunto, di trasmissione/ricezione dei dati. Così facendo e sommando i diversi contributi sulla base delle formule indicate in precedenza, si vede che l’efficienza media è circa dell’dell’80,7%; nel caso di un regolatore lineare si avrebbe invece un’efficienza soltanto del 49,8%! A dispetto della migliore efficienza, tuttavia, i convertitori switching sono caratterizzati, in confronto ai regolatori lineari, da una maggiore complessità, che si traduce in costi del circuito maggiori, e soprattutto in un ripple maggiore sulla tensione di uscita. Nel caso di sistemi RF, questo può rappresentare un serio problema in quanto riduce la sensibilità del circuito a radiofrequenza oltre a poter indurre componenti spurie nello spettro di emissione a causa di effetti di inter-modulazione. In linea di principio, se si analizza lo spettro di rumore del convertitore si trova una componente significativa proprio alla frequenza di switching del circuito; fortunatamente molti convertitori possono operare a diverse frequenze di commutazione, oltre a poter essere sincronizzati dall’esterno così da consentire di realizzare la soluzione che meglio si adatta alla particolare applicazione. Inoltre, molti di essi supportano una modalità chiamata ‘light load’ attiva quando la corrente richiesta dal carico è inferiore ad un certo valore. In tale modalità il convertitore commuta soltanto quando la tensione di uscita, come effetto della potenza assorbita dal carico, scende al di sotto di una soglia; genera quindi una serie di uno o più impulsi di carica dell’induttanza di uscita per riportare la tensione al valore desiderato. Si parla in questo caso di modulazione PFM (Pulse Frequency Modulation) del circuito o modulazione PWM (Pulse Width Modulation) con ‘pulse skipping’. Il risultato è che il rumore del convertitore viene ‘spalmato’ su uno spettro più ampio di frequenze. La figura 3 mostra ad esempio l’andamento del rumore in funzione della frequenza di switching e con una corrente di carico di 0.5 mA per il convertitore TPS61070 della Texas Instrument; si tratta di un convertitore di tipo boost con controllo PWM.
![Figura 3: spettro di rumore del convertitore boost TPS61070 a diverse correnti di carico (da [1]).](https://it.emcelettronica.com/wp-content/uploads/2018/10/spettro-di-rumore-1024x427.jpg)
Figura 3: spettro di rumore del convertitore boost TPS61070 a diverse correnti di carico
Come si può vedere, nelle condizioni light load rappresentate, la componente di rumore nello spettro intorno alla frequenza di switching nominale (1.3 MHz) è piuttosto larga e di minore intensità. Si fa più stretta e più intensa, invece, a mano a mano che aumenta la corrente di carico e, con essa, la frequenza del treno d’impulsi necessario per compensare il drop sulla tensione di uscita. Contemporaneamente compaiono nello spettro del rumore componenti non trascurabili in corrispondenza della frequenza di tale burst (dell’ordine di 20-30 KHz per il modello considerato). In condizioni di massima corrente di carico erogabile, infine, il convertitore funziona praticamente in modalità PWM continua; la componente legata al burst scompare ma quella intorno alla frequenza di switching nominale si fa più stretta ed intensa. Ovviamente il ripple può essere ridotto mediante opportuni circuiti di filtro dell’alimentazione o lavorando con tensioni di uscita più elevate (i circuiti RF supportano in genere un ampio range di alimentazioni di ingresso disponendo di un regolatore interno LDO); in questo secondo caso, ovviamente, si ha una riduzione dell’efficienza del circuito.
![Tabella 1: confronto tra regolatori lineari e convertitori switching (da [2]).](https://it.emcelettronica.com/wp-content/uploads/2018/10/regolatori-lineari-e-convertitori-switching-1024x396.jpg)
Tabella 1: confronto tra regolatori lineari e convertitori switching

Articolo davvero molto chiaro con la tabellina finale che sintetizza i principi di scelta. Veco che come sempre nel mondo dell’ingegneria non esiste una soluzione unica, ma la risposta è sempre “dipende!”