Fermatevi un attimo e prendetevi un momento per guardare con attenzione l'immagine principale di questo articolo: non vi sembra incredibile? Il nuovo modulo GPS firmato Telit è davvero piccolissimo.
Sono rimasto sinceramente colpito, non so voi, dalle dimensioni di questo modulo. Specie perché, dopo averne letto le specifiche tecniche, mi sono reso conto che esso non ha assolutamente nulla da invidiare ai suoi concorrenti di più grandi dimensioni.
Il nuovo Jupiter SE880 è effettivamente il più piccolo, ultra sensibile e più avanzato modulo SiP GPS a 48 canali. Tra i suoi aspetti più significativi, e certamente più interessanti, c'è anche una nuovissima tecnologia 3D che migliora il TIFF e permette anche la rilevazione indoor (vero tasto dolente della concorrenza) in modalità cold-start e con una sensibilità che arriva fino a -148 dBm (-165 dBm in modalità navigazione e tracking).
Tutto questo permetterà lo sviluppo di applicazioni davvero compatte e l'immagine lo suggerisce bene: potrebbe tranquillamente essere collocato all'interno di un anello. Insomma, i vecchi film di James Bond sembrerebbero aver fatto davvero da ispirazione agli autori e progettisti di questo dispositivo.
Questo genere di soluzione è anche vantaggiosa non soltanto per le semplici dimensioni del modulo ma perché la BOM (Bill Of Materials) è estremamente contenuta, non prevede grandi necessità di hardware di interfaccia e il circuito finito può essere realizzato su un'area complessiva inferiore a 40 mm2. Davvero un risultato notevole, specie se comparato con la tecnologia PCB odierna.
Tutto questo è possibile grazie al package QFN, che garantisce, nel contempo, anche le prestazioni in termini di temperature tollerate e dissipazione. Così, il Jupiter SE880 diventa il candidato perfetto per applicazioni ultra compatte e dispositivi di tracciamento sia professionali sia consumer. Immaginate un computer di bordo da bicicletta cosa potrebbe fare se solo integrasse questo dispositivo. Al di là delle solite funzioni che permettono di calcolare la velocità istantanea, la velocità media e così via dicendo, dotandolo di questo modulo, e di una semplice micro-SD, potrebbe permettere la memorizzazione dei dati del percorso. Immaginate che cosa vorrebbe dire riuscire ad analizzare la velocità e le prestazioni in funzione anche della distanza percorsa, anche con l'aumentare dei giorni. Si potrebbe studiare la propria performance nel corso del tempo con un sistema facilmente portabile, molto leggero e minimale.
Tutto questo supportato dal Satellite Based Augmentation System (SBAS).
Il Jupiter SE880 è fornito di un motore SW interno in grado di prevedere localmente la posizione delle effemeridi (o efemeridi). Si tratta di tabelle che contengono la posizione degli astri all'interno del cielo in funzione della data, dal momento che, come chiunque abbia usato un astrolabio sa, la porzione di cielo visibile dipende dalla posizione della Terra in funzione della data. Certo, tutto questo prima che lo Tsunami inclinasse l'asse terrestre ma sebbene questo abbia causato una leggera variazione di ciò che vediamo, non è stata modificata in alcun modo la posizione "vera" delle stelle fisse. La predizione che il dispositivo è in grado di fare ha una "autonomia" di tre giorni.
Il processore del quale il modulo è equipaggiato è dotato di un LNA integrato, un filtro da 2,4 GHz; il dispositivo è in grado di fornire le informazioni GPS tramite standard NMEA oppure interfaccia seriale.
Abbiamo anticipato la sua nuova ed avanzata tecnologia 3D; questa permette la migliore sensibilità disponibile anche quando ci sono soltanto antenne passive in maniera tale da garantire la migliore stabilità nelle performance anche e soprattutto in funzione della temperatura. Questi dati vanno intesi comparati con le analoghe prestazioni attualmente offerte nell'ambito della tecnologia PCB "convenzionale".
Questo modulo, oltre a garantire una grande fruibilità nelle applicazioni portatili, rappresenta la soluzione ideale se si voglia utilizzare la coppia Wireless+GPS per ottenere un'ottima integrazione anche in funzione del time-to-market.
Features
E dopo questa lunga introduzione è arrivato il momento di vedere nello specifico cosa è interessante di questo modulo e perché esso rappresenti una grande opportunità per tutti i progettisti. Ecco le features.
Per quanto riguarda le prestazioni bisogna segnalare:
- altissima sensibilità anche senza un'antenna attiva;
- motore di navigazione PVT con sensibilità fino a -165 dBm;
- 48 canali;
- SBAS (WAAS, EGNOS, QZSS).
Per quanto riguarda il consumo di potenza:
- <10 mW richiesti per la modalità Trickle Power;
- consumo di corrente medio compreso tra 50 e 500 uA all'ora per garantire l'hot start.
Jammer Removal in 3 stadi (attivo e passivo):
- preselezione integrata del filtro SAW alla porta d'antenna;
- filtro notch integrato sintonizzato alla frequenza di 2.4 GHz;
- jammers removal in-band fino a 80 dB-Hz;
- fino ad 8 jammer CW.
Funzioni di navigazione avanzata:
- sincronizzazione veloce 1-SV per l'aggiornamento UTC;
- interfaccia I2C;
- Data logger interno;
- smoothing delle misure per la modalità "on foot";
- A-GPS.
La semplicità d'uso è garantita perchè, tra le caratteristiche, ci sono:
- soluzione su PCB 2-layers;
- memoria esterna opzionale (Flash SPI oppure EEPROM seriale);
- GPIO Baud Rate;
- supporto per I2C host, SPI e UART.
E veniamo, in ultimo, alle caratteristiche meccaniche:
- Dimensioni: 4.7 x 4.7 x 1.4 (mm3);
- Package: LGA 0.4mm 34 pin;
- Peso: 0.08g.
L'azienda fa anche sapere, come sempre tiene a precisare, che tutti i suoi prodotti, e questo non fa eccezione, sono stati realizzati con particolare attenzione alla direttiva RoHS che, per chi non lo sapesse, è un documento dell'Unione Europea, in particolare la 2002/95/EG, che si occupa di mettere al bando materiali e sostanze ritenute pericolose per l'ambiente. Nella produzione, continuano, è stato utilizzato un metodo eco-friedly che ha permesso di risparmiare circa il 15% di acqua ed elettricità, oltre a produrre minori quantità di rifiuti tossici o pericolosi.
Sulla documentazione ufficiale del prodotto (che si può reperire a questo indirizzo) troviamo prima di tutto il suo diagramma a blocchi:
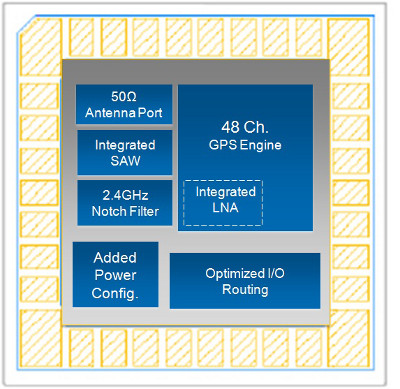
ed ancora l'elenco dei principali componenti:
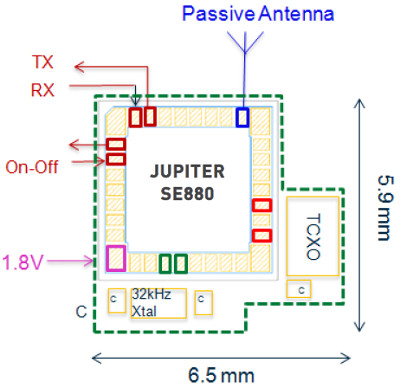
in particolare, riguardo quest'ultima figura, si nota chiaramente come il sistema sia completamente configurato se dotato di 2 clock esterni (TCXO da 16.369 MHz ed un quarzo, XTAL, da 32.786 MHz), un'antenna (in questo caso passiva ma, come abbiamo detto, può essere anche attiva), ed una alimentazione da 1.8 V che sia dotata di caratteristiche estremamente precise, e specificate, che vedremo tra un attimo.
L'alimentazione può essere supportata da un LDO che fornirà un valore tipico di 14 uA quando il GPS sia in ibernazione.
Parlavamo di condizioni specificate; esse riguardano, prima di tutto, la tensione di ingresso a RF, il cui valore deve essere di 3V. Il valore di potenza in ingresso, invece, deve essere pari a 10 dBm.
L'alimentazione principale, VDD, dovrà essere pari a 2.2V mentre la tensione di riferimento per la protezione da scariche elettrostatiche (ESD) è pari a 50 V.
Completano la tabella dei valori tipici le tensioni poste ai pin in ingresso ed in uscita, entrambe pari a 3.6V.
Nella caratterizzazione del dispositivo ruolo fondamentale ricopre anche la temperatura operativa (che coincide con quella di storage), compresa tra un minimo di -40 ed un massimo di 85 °C.
Le premesse, dunque, sembrano essere davvero interessanti per un modulo che promette meraviglie soprattutto per la sua capacità di essere integrato davvero con poca elettronica "intorno". E voi, per che cosa lo usereste? Che applicazione avete in mente?

Per ulteriori informazioni potete scrivere a questa email: [email protected]


Scusate ma non ho capito i valori di sensibilità.. è -148 o -165?
Sono relativi a diverse condizioni di funzionamento.
In particolare, -165 dBm è il valore relativo al “regime” (modalità navigation).
Quando il segnale non è del tutto/ancora sincronizzato, allora il valore è più basso, naturalmente. E questo si traduce in un valore restituito meno preciso (mai notato che ci son volte, durante la sincronizzazione) che sulla mappa non compare un punto preciso ma un’area cerchiata più ampia? Ecco, quella è una fase di sincronizzazione non ancora completata. 😉
no scusate, non ho capito.. Mi spiegate la differenza tra quei valori? Che cambia tra applicazioni indoor e non?
dunque, la questione è molto semplice. Quando viene attivato il ricevitore GPS, esso deve agganciarsi al segnale del satellite. Questo perché naturalmente ricevendo il segnale può posizionare l’indicatore sulla mappa. Naturalmente, se avete provato ad utilizzare un dispositivo dotato di GPS, è facile rendersi conto che il ricevitore funziona al meglio quando si è in campo libero ma soprattutto quando si è su una strada possibilmente principale.
Il ricevitore funziona molto peggio innanzitutto all’avvio, specie in condizioni di cold start (ovvero quando parte e deve sintonizzarsi da zero piuttosto che quando viene riattivato ed aveva già raggiunto la sincronizzazione con il satellite, condizione conosciuta con il nome di warm start), se ci si trova in stradine di campagna, per esempio, oppure all’interno di gallerie, naturalmente in ogni altro luogo che sia chiuso. Anche all’interno di un appartamento la sincronizzazione sarà molto difficoltosa ed è proprio per questo motivo che in questi specifici casi la soluzione migliore è quella di affiancare alla ricevitore GPS una connessione dati, magari anche sfruttando il Wi-Fi.
Se si prova a mettere insieme questi elementi, si ottiene certamente una più veloce sincronizzazione.
Questo si traduce, o meglio viene espresso, grazie ai numeri che avevamo riportato.
Più chiaro ora? 🙂