
L'articolo non spiegherà la teoria di funzionamento dei servo, in quanto ampiamente trattata in molti articoli del nostro blog. Si soffermerà, piuttosto, sulle soluzioni da adottare per la loro implementazione, in quanto le porte logiche della nostra scheda ESPertino erogano una tensione di 3.3V.
Introduzione
I servo sono utilizzati molto nei sistemi di automazione e danno un grande contributo, probabilmente, pari ai motori passo-passo. Consentono di ottenere precisi movimenti angolari utilizzando una sola connessione verso la porta logica della MCU.
Collegamento a ESPertino
La maggioranza dei servo in circolazione funziona con una tensione di alimentazione di +5V e lo stesso dicasi per il segnale logico di pilotaggio. Il loro funzionamento diretto con ESPertino, pertanto, potrebbe avvenire con molti problemi, dal momento che le uscite digitali assicurano un potenziale di +3.3V. Molti servo motori, comunque, alimentati a 5V funzionano bene anche se il segnale di controllo è limitato a 3.3V quindi, prima di provare a usare circuiterie più complesse, si sperimenti lo schema di base proposto in figura 1. Anche se tale schema è funzionale, converrebbe sempre collegare l'alimentazione del servomotore (filo rosso e nero) direttamente a un'altra fonte esterna. La linea del segnale, invece, è quella più "inoffensiva" e a basso assorbimento di corrente. Esistono, per fortuna, anche diverse soluzioni alternative per effettuare una buona traslazione dei livelli logici.
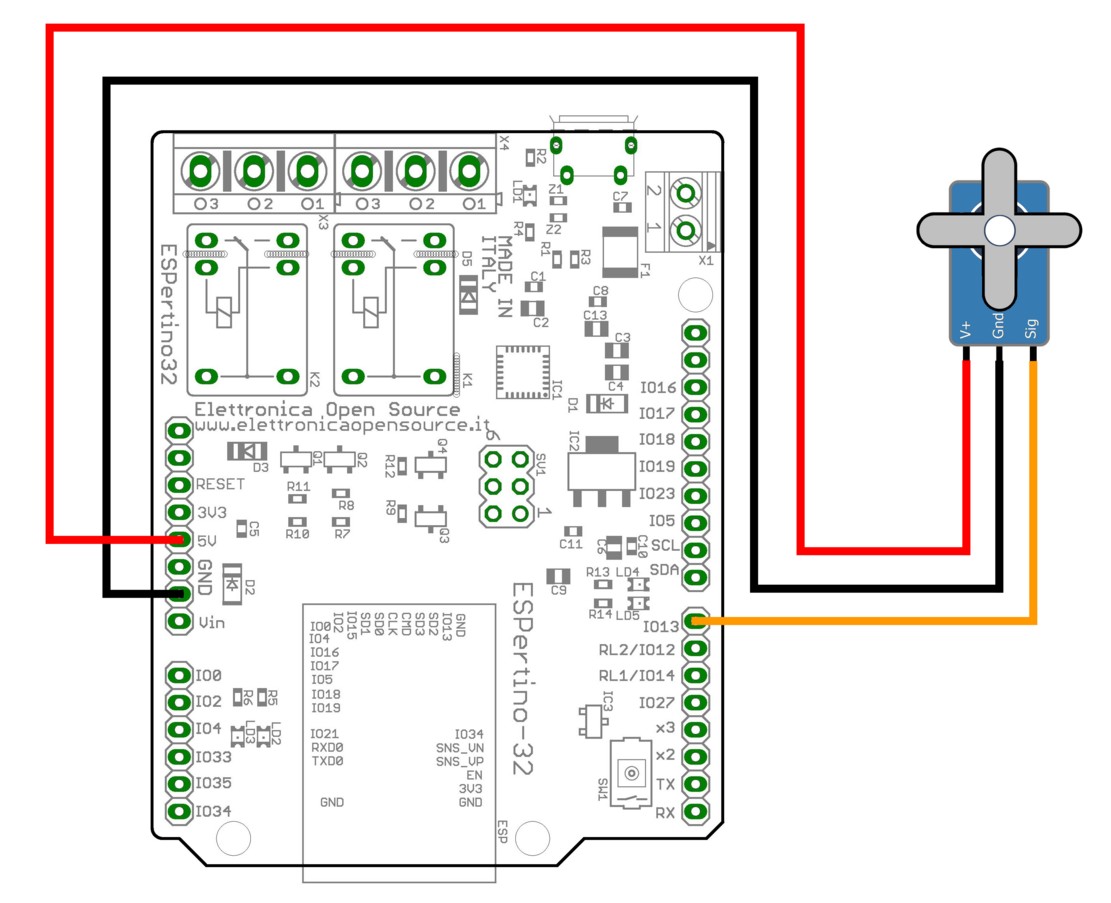
Figura 1: collegamento di principio di un servo a ESPertino
Lo sketch destra, centro e sinistra
Come si sa, per effettuare delle rotazioni occorre "bombardare" il servo con alcuni impulsi modulati (PWM). A seconda del duty cycle dell'impulso cambia la distanza angolare percorsa. Gli impulsi quadri devono avere una durata di circa 20ms totali (pari a una frequenza di 50 Hz). La tolleranza, comunque, è molto alta e anche diverse temporizzazioni funzionano egregiamente. Il fronte attivo (ON) deve avere una durata compresa tra 1ms e 2ms (altri modelli potrebbero esigere diverse temporizzazioni). Diverse durate modificano l'angolo di rotazione. Lo sketch che segue ha il compito di far muovere il perno del servo a sinistra, al centro, a destra e al centro nuovamente, all'infinito, dando luogo al movimento visibile nell'animazione di cui alla figura 2.
void setup() {
pinMode(13, OUTPUT);
}
//-------------LOOP----------------
void loop() {
for(int k=0;k<20;k++) {
digitalWrite(13,HIGH);
delayMicroseconds(1000);
digitalWrite(13,LOW);
delay(19);
}
delay(500);
for(int k=0;k<20;k++) {
digitalWrite(13,HIGH);
delayMicroseconds(1500);
digitalWrite(13,LOW);
delay(18.5);
}
delay(500);
for(int k=0;k<20;k++) {
digitalWrite(13,HIGH);
delayMicroseconds(2000);
digitalWrite(13,LOW);
delay(18);
}
delay(500);
for(int k=0;k<20;k++) {
digitalWrite(13,HIGH);
delayMicroseconds(1500);
digitalWrite(13,LOW);
delay(18.5);
}
delay(500);
}
Figura 2: l'animazione di un servo mosso dallo sketch proposto
La larghezza dell'impulso alto determina, dunque, il grado di angolazione del servo motore. Scegliendo opportunamente diversi valori, compresi tra il minimo e il massimo, è possibile orientare il perno in qualsiasi direzione consentita, come mostrato in figura 3.
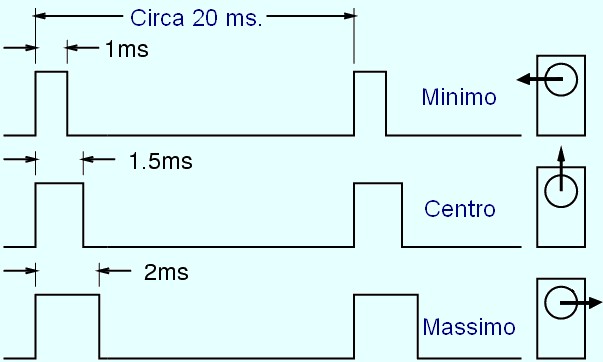
Figura 3: la larghezza dell'impulso determina una diversa angolazione
Traslazioni dei segnali
Per innalzare, a ogni modo, il livello del segnale logico da 3.3V a 5V sono possibili diverse soluzioni. Alcune di esse sono le seguenti:
- usare un transistor o un mosfet in uscita. Fare attenzione alle inversioni di fase del segnale;
- usare i traslatori a pompa di carico LTC1516 o LTC1754-5 della Linear Tecnology (vedi figura 4);
- usare i traslatori MAX1840 o MAX1841;
- usare il MAX3370;
- e molte, molte altre...
La cosa più importante da considerare, al di la della corretta tensione elettrica in uscita, è quella che il traslatore deve assicurare un'alta velocità di commutazione e deve "seguire", alla perfezione, il segnale in ingresso, senza "perdere colpi".

Figura 4: Il regolatore DC/DC LTC1754 con pompa di carica


Bello questo articolo, sia pure di vecchia data, capita a puntino, dal momento che si attende l’utilizzo del nostro Espertino, molto importante invece, tenere presente il particolare che questa scheda lavori a 3,3v. Anziché i classici 5 v. Di conseguenza al di là dell’utilizzo, bisogna usare i circuiti adattatori d’interfaccia atti a risolvere questa necessità. Un tipico esempio come servomotore mostrato nell’articolo, l’utilizzo del regolatore DC/DC LTC1754 molto dedicato.
Anche per me risulta comodo per lo sviluppo di alcune applicazioni sul modellismo; domanda: quanti servomotori posso controllare con una scheda ESPertino? E’ difficile ricreare un movimento sincronizzato dei vari servo (con angoli differenti)? o ci si perde nei calcoli dei temi esatti? Avrei bisognio di uno spunto per creare lo sketch ad esempio impostando degli angoli e ricreandoli in automatico con tempi stabiliti uno dopo l’altro…. quanti potrebbero essere i servo collegabili senza incorrere in temporizzazioni errate?
Grazie!