
L'articolo mostra, in chiave educational ed in piccola scala, come realizzare un sensore di velocità acustico passivo utilizzando un semplice microfono per PC ed il software LabVIEW. Il sensore sfrutta l'effetto Doppler per misurare la velocità di spostamento di un veicolo virtuale, simulato mediante la generazione di un segnale chirp riprodotto da un altoparlante. Il caso d'uso mostra il funzionamento dell'intero sistema, partendo dal principio fisico fino ad arrivare ai front panel. Infine, l'articolo fornisce una breve panoramica sulle ragioni che spingono le aziende ad investire sempre di più in tali sistemi, le soluzioni commerciali più utilizzate, ed i pro e contro che le caratterizzano. Si rimanda il lettore più curioso ad approfondimenti riguardo il processo di taratura, oggetto di precedenti articoli sul blog.
Introduzione
Sebbene il concetto di velocità sia un concetto vecchio quanto il mondo, noto quanto le leggi che descrivono la dinamica Newtoniana - tutti conoscono la famosa formula F=ma o il principio di azione e reazione -, le aziende sono continuamente alla ricerca di nuove soluzioni per la realizzazione di misuratori di velocità contraddistinti da maggiore accuratezza, velocità ed economicità, capaci di sfruttare nuove grandezze fisiche, o meglio le loro variazioni rispetto al tempo, e/o migliorare l'efficienza di quelle attualmente in uso. Per capire quanto tale ricerca porti con sè grossi investimenti, basti pensare a quanto annualmente Autostrade per l'Italia spende per aggiornare i propri sistemi di misura della velocità, che mappano l'intera rete autostradale italiana, investimento inferiore solo a quello che Autostrade spende quotidianamente per operazioni di manutenzione, calibrazione ed elaborazione dei dati raccolti.
Tanto per essere pratici, chi non conosce il famoso sistema "Tutor"?! Ahimè, l'incubo di molti automobilisti - primo solo all'autovelox - che percorrono (per lavoro o per raggiungere le mete vacanziere) strade a scorrimento veloce. Il sistema, tanto semplice quanto banale, si occupa di misurare l'intervallo di tempo tra due misurazioni consecutive, il Δt per dirlo in termini ingegneristici, dividendo poi la distanza che separa i due punti di misura per l'intervallo di tempo che intercorre tra i due passaggi, ottenendo così la velocità (media) tra i due punti di misura ovvero quella del veicolo. Senza entrare in inutili tecnicismi, il Tutor sfrutta un sistema di telecamere per acquisire dati provenienti dall'ambiente circostante. Tale flusso è poi elaborato da algoritmi di computer vision che estrapolano (da ogni singolo frame) i numeri di targa degli autoveicoli in transito, numeri collezionati e confrontati all'intero di un enorme database per ricavare la misura di velocità. Come il lettore può facilmente immaginare, seppure il processo sia tanto semplice quanto banale, richiede una mole enorme di capacità di calcolo (necessaria, ad esempio, per estrarre il numero di targa dai singoli frame) nonché grandi spazi di archiviazione in cui immagazzinare tali dati, creando i cosiddetti big data.
Questa è la ragione per cui la ricerca, e dunque le aziende, spingono per la realizzazione di sensori di velocità passivi (a differenza del tutor che è un sistema attivo), capaci di sfruttare la variazione delle onde sonore (il rumore prodotto da ogni singolo veicolo per effetto dell'azionamento delle sue parti meccaniche e dell'interazione dei pneumatici con la superficie stradale) per ottenere una misura di velocità dei mezzi in transito. Lo scopo di questo articolo è mostrare come sia possibile realizzare, in chiave educational ed in piccola scala, un sensore di velocità acustico passivo, utilizzando un semplice microfono per PC ed il software LabVIEW. Capiremo quali sono le soluzioni commerciali comunemente utilizzate, delineandone brevemente pro e contro, i principi fisici dietro il loro funzionamento e quello del sensore, nonché la struttura del software sviluppato per la realizzazione del sensore proposto.
Tecnologie
Quando si parla di sensori acustici passivi per la misura di velocità, due sono i principali attori presenti sul mercato: lo Smartsonic IRD (Figura 1) e lo SmarTekSAS-1 (Figura 2). Il primo rileva la presenza di veicoli in movimento misurando il ritardo tra l'arrivo del suono (delle parti meccaniche del veicolo in movimento) ad una serie di microfoni distanziati verticalmente. Quando il veicolo si trova all'interno della zona di rilevamento, il suono arriva (quasi contemporaneamente) nell'area di ricezione; al contrario, quando il veicolo si trova all'esterno di tale zona, il suono si propaga ai microfoni con un certo ritardo (il Δt) sfruttato per la misura di velocità.
L’ampiezza della zona di rilevamento per dispositivi di questo tipo varia tra i 6 e gli 11 metri, ed è caratterizzata da un'elevata sensibilità. Come contro, lo strumento fa uso di algoritmi computazionalmente onerosi, ed è consigliato per applicazioni nelle quali non sono richiesti sensori intrusivi (ad esempio, ponti) o dove il traffico veicolare è caratterizzato da veicoli la cui velocità minima non è mai inferiore ai 32 km/h.

Figura 1: Sensore acustico passivo Smartsonic IRD
Il secondo (lo SmarTekSAS-1), invece, utilizzando una disposizione distribuita dei microfoni, consente il rilevamento di velocità fino ad un massimo di 6 corsie. La zona di rilevamento, rispetto al precedente sensore, è più bassa (si aggira intorno ai 3.6 metri nella direzione del traffico) e richiede un'altezza di installazione che varia tra i 5 ed i 12 metri. Il sensore, inoltre, è in grado di fornire volume, occupazione e velocità veicolare di ogni corsia.

Figura 2: Sensore acustico passivo SmarTekSAS
L'idea alla base del progetto
Per capire come realizzare al meglio un sensore acustico passivo, consideriamo un osservatore fermo ed un veicolo in movimento verso la direzione dell'osservatore. L'onda sonora generata dal veicolo in movimento, percepita dall'osservatore fermo, può essere descritta da un segnale chirp (Figura 3), ovvero un segnale la cui frequenza varia linearmente con il tempo. In particolare, con l'avvicinarsi del veicolo all'osservatore, quest'ultimo percepirà un aumento della frequenza, in altre parole un suono che da flebile diventa sempre più intenso e ravvicinato, dando l'idea che il veicolo è in avvicinamento. Ma come questa descrizione può essere trattata da un punto di vista fisico? E soprattutto, a cosa è dovuta?
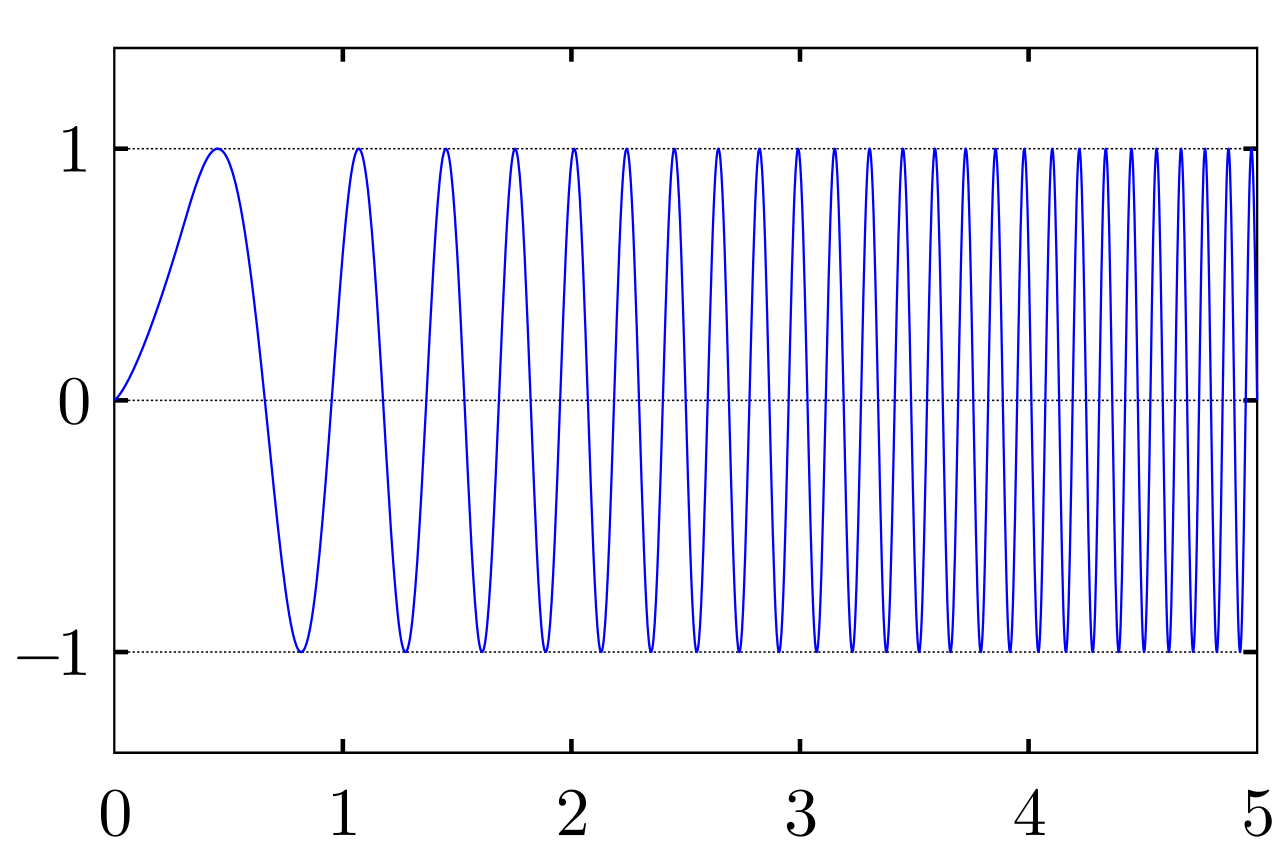
Figura 3: Tipico esempio di segnale chirp
Principio fisico
Il principio fisico che regola il funzionamento del sensore è noto come effetto Doppler. Il fenomeno fisico consiste nel cambiamento apparente, rispetto al valore originario, della frequenza o della lunghezza d'onda percepita da un osservatore raggiunto da un'onda emessa da una sorgente che si trova in movimento rispetto all'osservatore stesso. Se la sorgente e l'osservatore si muovono entrambi rispetto al mezzo di propagazione delle onde, l'effetto Doppler totale è ottenuto dalla combinazione dei due movimenti.
Tale effetto può essere facilmente constatato ascoltando come varia il suono emesso dalla sirena di un mezzo di soccorso quando si avvicina e quando si allontana rispetto alla nostra posizione, oppure quello emesso da un treno in avvicinamento ed in allontanamento dalla stazione ferroviaria. L'effetto è tanto più evidente quanto più il mezzo è veloce. L'effetto è anche più evidente quando l'oggetto o la fonte che emette il suono si trova vicino ad un osservatore.
Componenti hardware e software
Poche e banali sono le componenti che costituiscono il sensore:
- un generatore che simula il passaggio di un veicolo ad una data velocità generando un segnale chirp all'interno di un fissato range di frequenze (Figura 4). Tale segnale è generato utilizzando LabVIEW, collegato ad un altoparlante attraverso una scheda di acquisizione audio ed un jack da 3.5''. La stessa interfaccia software è utilizzata anche per la taratura dello strumento.
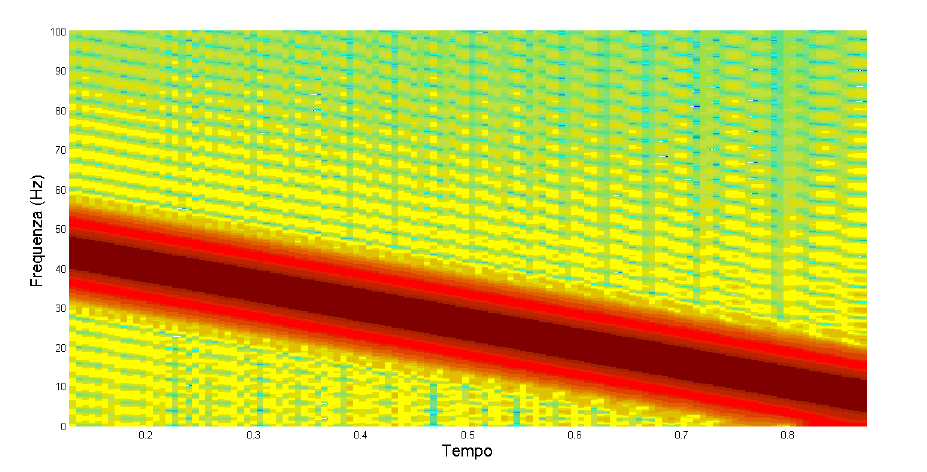
Figura 4: Shift di frequenze del segnale chirp generato da LabVIEW
- un sistema di acquisizione, composto da un semplice microfono, che registra il segnale audio proveniente dal generatore e lo elabora al fine di riconoscere la variazione di frequenze e conseguentemente la velocità del veicolo. Il microfono è collegato ad un PC, dotato di una scheda audio. In particolare, per il caso d'uso è stata utilizzata un'appartenente alla famiglia Realtek High Definition Audio, capace di campionare un segnale alla frequenza di 44100 Hz.
In Figura 5 lo schema a blocchi riassume il funzionamento dell'intero sistema, dall'emissione del suono fino alla misura di velocità.
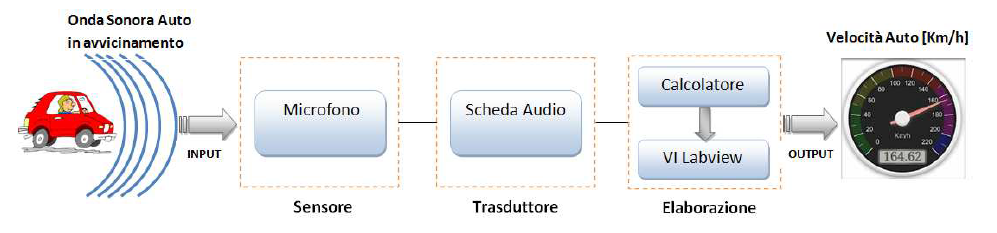
Figura 5: Schema a blocchi del misuratore di velocità acustico passivo
Generatore
Il front panel LabVIEW (Figura 6), utilizzato come interfaccia per la generazione del segnale chirp, ha come parametri di ingresso più importanti
- la velocità del veicolo, espressa in km/h
- la frequenza iniziale dell'auto, supposta pari a 332 Hz (frequenza tipica di un veicolo in movimento)
per poi sintetizzare il segnale attraverso l'algoritmo riportato in Figura 7.
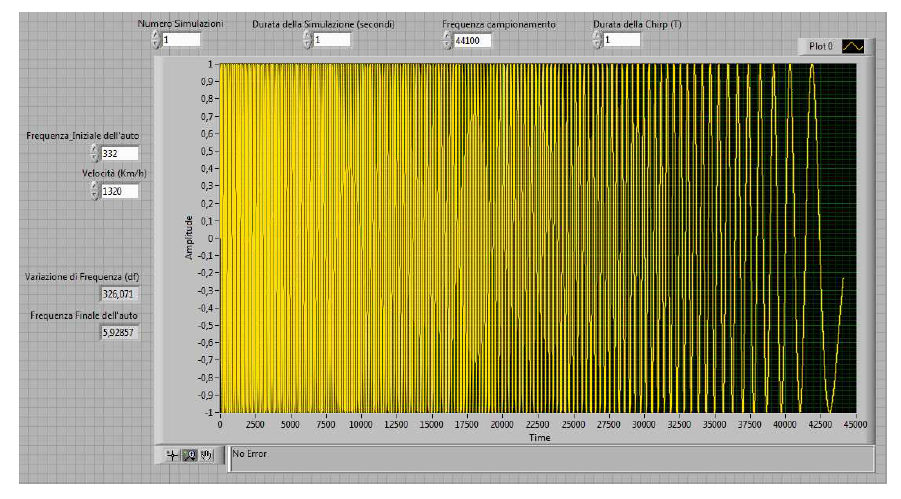
Figura 6: Front panel LabVIEW per la generazione del segnale chirp
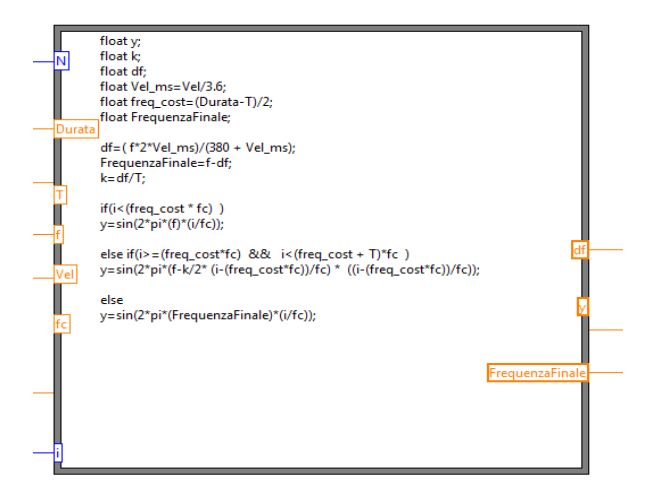
Figura 7: Algoritmo per la generazione del segnale chirp
In particolare, il segnale chirp è generato come la somma di tre segnali sinusoidali a tre diverse pulsazioni, che rappresentano i tre casi fondamentali del fenomeno, ovvero: l'avvicinamento dell'auto all'osservatore, il passaggio davanti all'osservatore ed il conseguente allontanamento dell'auto.
Il primo segnale (avvicinamento dell'auto all'osservatore) avrà una frequenza pari a quella iniziale dell'auto. Il secondo (passaggio davanti all'osservatore) è la porzione lineare del segnale chirp, in cui il segnale parte dalla frequenza iniziale dell'auto e via via diminuisce sempre più in frequenza sino ad arrivare alla frequenza di allontanamento. Il terzo (allontanamento dell'auto) mantiene l'ultima frequenza raggiunta dalla chirp fino alla fine del segnale. Nello specifico, la variazione di frequenza lineare per la sintesi del chirp segue l'equazione [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3065 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
La progettazione dei circuiti stampati militari e aerospaziali
Progettiamo i nostri filtri con FilterPro della Texas Instruments

Microcontrollori e crittografia
Il Nuovo Sistema di Controllo Operativo GPS Satellitare OCX
Otto resistori in cerca di un DAC
