
Chi non vorrebbe avere un modellino personale di quadricottero radiocomandato, magari dotato di videocamera HD, e stupire gli amici con emozionanti manovre e riprese dall'alto mozzafiato? Questo sogno si può realizzare seguendo le istruzioni di Russell de la Torre, che ci insegna come auto-costruirsi un quadricottero basato su Arduino.
Russell voleva a tutti i costi avere un quadricottero tutto suo, ed essendo un amante del fai-da-te, ben sapeva che le soddisfazioni maggiori le avrebbe avute solo auto-costruendolo, pezzo per pezzo. Certo, esisteva anche la possibilità di acquistare un kit disponibile in commercio, ma Russell preferì comunque seguire la propria strada, una scelta che avrebbe comportato la necessità di spendere molto tempo per reperire tutte le informazioni necessarie. Non voleva però limitarsi a questo, il suo obiettivo era soprattutto quello di mettere a disposizione di tutti il know-how e gli strumenti hardware e software necessari per realizzare autonomamente il progetto; in altre parole, realizzare un vero e proprio progetto open-source. Russell ha avuto successo, ed il progetto è stato pubblicato nel suo blog.
Il risultato è stato un quadricottero basato sulla piattaforma hardware open-source Arduino, battezzato con il nome "Scout UAV". Per la cronaca, ricordiamo che UAV è l'acronimo di Unmanned Aerial Vehicle, cioè un velivolo in grado di operare senza pilota, quindi comandato a distanza. In particolare, il produttore Northrop Grumman ha sviluppato un elicottero UAV denominato MQ-8 Fire Scout, al quale presumibilmente l'autore del progetto si è ispirato. La realizzazione del quadricottero Scout UAV comporta una spesa variabile tra un minomo di circa 300 dollari ed un massimo di quasi 1200 dollari, a seconda del tipo di materiali che si intende impiegare (la spesa complessiva può ulteriormente scendere se si hanno già a disposizione alcuni dei componenti richiesti per il progetto). Russell ha elencato sul suo sito non solo la lista dettagliata dei componenti, ma anche le possibili alternative disponibili sul mercato, con il costo associato. Il progetto del quadricottero, visibile nell'immagine di apertura dell'articolo, è corredato del firmware necessario per programmare Arduino. Al di là delle considerazioni o valutazioni che ognuno può esprimere su questo progetto, ritengo che sia comunque da encomiare il lavoro svolto da Russell, vero interprete della filosofia open-source.
Prima di vedere più in dettaglio gli aspetti tecnici del progetto, godiamoci questi due video girati con lo Scout UAV. Il primo si riferisce al primo volo outdoor del quadricottero, mentre il secondo mostra delle immagini catturate da una on-board camera installata sul velivolo. Quando è stato girato quest'ultimo video, Russell stava ancora testando il comportamento in volo dello Scout "appesantito" dalla presenza della videocamera, che inevitabilmente diminuisce l'agilità del velivolo e rende più critica la stabilità dello stesso.
I sensori
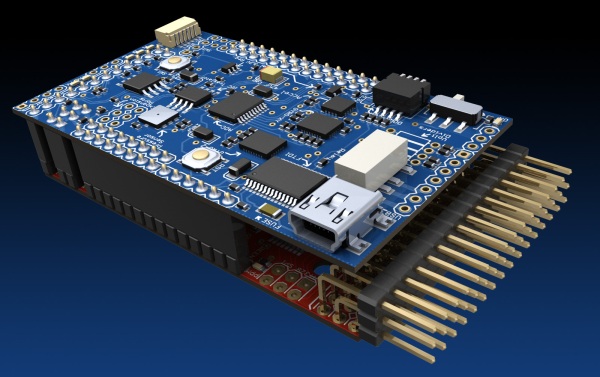
La sensoristica gioca un ruolo fondamentale per la navigazione e l'orientamento del velivolo. Non viene utilizzato un sensore unico, bensì un set di sensori che, cooperando tra di loro, garantiscono il corretto funzionamento dello Scout. Questi sensori includono fondamentalmente giroscopi e accelerometri, ai quali recentemente si sono aggiunti anche i magnetometri, utilizzati per calcolare la direzione di volo. In commercio esistono delle schede specializzate che incorporano tutti questi sensori e forniscono in uscita i valori di velocità, direzione, e forza gravitazionale su assi multipli. Queste schede vengono chiamate IMU (Inertial Measurement Unit), e la scelta di Russell è ricaduta sul modello ArduPilot Mega IMU, uno shield progettato per funzionare con la scheda ArduPilot Mega, visibile nell'immagine seguente.
I motori
Inizialmente è sorto il seguente problema: meglio utilizzare un motore a spazzole oppure un brushless? I motori brushless hanno certamente delle prestazioni superiori, dovute alla mancanza di punti di contatto tra statore e rotore ma, conseguentemente, anche il loro costo è maggiore rispetto ai motori a spazzole. Il vantaggio però è che virtualmente non richiedono alcuna manutenzione, ed hanno una durata maggiore. La scelta è ricaduta perciò su un motore brushless, e più precisamente su un modello outrunner, particolarmente indicato per basso numero di giri ed elevata coppia.
Le eliche
Dopo vari tentativi e test sperimentali, la scelta delle eliche è ricaduta su un modello a 2 pale 8x4. Si noti come, per ragioni di stabilità, sul quadricottero occorre installare una coppia di eliche con orientamento delle pale orario ed una coppia con orientamento antiorario.
La radio
Lo Scout è controllato tramite un radiocomando, con il quale si può variare la velocità e la direzione. Il numero minimo di canali richiesti per controllare un quadricottero è pari a 6: 4 servono per i motori, mentre gli altri 2 servono per commutare tra modo acrobatico e modo stabile, e per abilitare o disabilitare la localizzazione GPS durante il volo. Un numero di canali maggiore di 6 permette ovviamente di controllare altri dispositivi come le luci, la videocamera, o i carrelli. La scheda ArduPilot Mega supporta la comunicazione seriale tra il quadricottero ed un computer. Questa comunicazione viene utilizzata per uploadare il software, modificare i parametri, e per modificare il piano di volo. La scelta è ricaduta su dei moduli XBee 2.4GHz da 1mW.
Il software
Esistono varie community che sviluppano software per la scheda ArduPilot Mega, tra le quali ricordiamo: ArduCopter, ArduPirates e AeroQuad. La scelta dell'autore è ricaduta sul codice di ArduCopter, ben commentato, e più semplice da capire e modificare.
Sul sito di Russell sono infine presenti le istruzioni passo-passo per la costruzione del quadricottero.
Arduino è disponibile da Farnell





questo è un tri-cottero basato su arduino
http://shrediquette.blogspot.com/
e sembra altrettanto interessante.
Il progetto e’ molto affascinante, non so quanto complicato, se ho ben capito la funzione di Arduino e’ quella principalmente di interpretare i comandi impartiti da un classico radiocomando al quarzo, sostituendo la funzione dei soliti servomotori, integrando alcuni sensori tipo giroscopi etc. Non e’ in realta’ un sistema autonomo in grado di volare rispettando un piano di volo? Facendo qualche ricerca ho trovato una cosa simile e simpaticissima. di questi sistemi impressiona l’estrema stabilita’ nei movimenti, probabilmente legata proprio al fatto di avere 4 motori che se ben sincronizzati consentono evoluzioni incredibili.
il sistema usa un ATmega 48 e AVR assembly, anche qui sono presenti tutti i dettgali di progetto e il software.
http://www.rcgroups.com/forums/showthread.php?t=1191843
http://www.rcgroups.com/forums/showthread.php?t=1143569
http://www.youtube.com/v/2vA7XQkHYeA&hl
Caspita, davvero interessante! Mi chiedo come viene fatta la stabilizzazione: ho visto che è prevista una procedura di “tuning” e c’è scritto che la stabilizzazione viene fatta attraverso un controllore PID. Mi piacerebbe provare quanto è difficile stabilizzare l’oggetto e come si pilota. A parte la meccanica e l’elettronica per i motori infatti penso che la cosa realmente difficile di un progetto del genere sia proprio realizzare il software di controllo. Sono molto curioso… mi viene sempre voglia di comprare dei kit del genere, ma so che il tempo è sempre troppo poco… magari, approfittando del fatto che il progetto è open-source, almeno darò un’occhiata al codice. Qualcuno si è già fatto un’idea della complessità dell’algoritmo utilizzato?
Certamente è un progetto affascinante, mi è sembrato che di notte possa tranquillamente essere scambiato per un UFO, come i modellini degli elicotteri sono hobby abbastanza costosi, fra l’altro si devono prevedere più pacchi batteria, i cinesi come ogni cosa hanno realizzato dei kit più economici e più semplici da costruire, probabilmente copiando qualcuno.
Credo siano parametri che si riferiscono a specifici settori di modellismo.
Nei motori brushless il 3D dovrebbe significare che è specifico per Aeromodelli 3D fino a XX grammi. Sport è sicuramente un parametro simile in quanto viene spresso sempre in g.
Quindi Sport e 3D dovrebbero essere tipi di aeromodelli.
Ci vorrebbe un esperto aeromodellista!
salve a tutti quelli che leggono.c’è qualcuno che sa dove andare sui siti.
Io vorrei sapere dove si possono trovare dei disegni che ti indicano come assemblare un drone 6/8/motori e la componentistica,sono nuovo in questo mondo
oltre a non esserci le istruzioni passo passo per costruire un drone… è tutto maledettamente scritto in inglese!!
ci sono soluzioni o siti in italiano dove andare a vedere??
sei in grado di aiutarmi a costruire un drone a 8 eliche? ma esiste un sistema meno macchinoso di usare arduino? io ho trovato questi pezzi ma non so che farmene e vorrei sapere cosa è mglio comprare. in alternativa hai un tuo sito dove poter "rubare" qualche tecnica costruttiva?
http://www.hobbyhobby.it/contents/it/p458_Ardupilot_mega_kit_completo_di_gps_saldato.html
http://www.hobbyhobby.it/contents/it/p915_Prodotto_909.html
http://www.hobbyhobby.it/contents/it/p892_DJI_Naza_IOSD_Mini.html
http://www.hobbyhobby.it/contents/it/p857_DJI_Innovations_NAZA_M_LITE_con_gps.html
grazie in anticipo. Emanuele
salve sono un nuovo utente e inesperto di questo affascinante mondo, ma come molti con molta fantasia:
la mia domanda esiste qualche progetto già ideato per radiocomandare automodelli o elimodelli tramite il bluethoot dello smartphone?
o sempre dallo smartphone comandare servocomandi agganciati …che sò alla portiera di un'auto o al alzavetri??
grazie
ciao,
ho letto un articolo dell’applicazione di droni o quadricotteri nel settore dell’agricoltura. Facendo una ricerca su Google sono arrivato a questo articolo.
Vorrei, infatti, avvicinarmi al mondo Arduino visto che provengo (come diploma) da un istituto tecnico con specializzazione elettronica e trovare applicazioni interessanti.
Ho letto l’articolo e visto i vari progetti ma per uno che si accosta a questo mondo sono un tantino complicati. Volevo, dunque, chiedervi se c’è qualche progetto semplice, ben spiegato (anche in inglese) che mostri passo passo come costruirsi un tale dispositivo, con la parte hardware e software.
In ultimo ci sono kit già pronti in commercio, a che costo? Quali negozi on line li hanno?
So che ho fatto molte domande ma spero che qualcuno mi dia indicazioni.
Grazie mille!
Giuseppe
Ciao a tutti,
sono un elimodellista di lunga esperienza e costruisco ed utilizzo multirotori fin dalla loro comparsa.
Se vi servono suggerimenti contattatemi pure [email protected].
Sto costruendo un sistema radio con Arduino mini e la trasmissione a 868 mhz da utilizzare come sistema di terminazione del volo. Vorrei avere qualche aiuto, non avendo particolare esperienza su arduino avrei bisogno di aiuto per affinare gli sketch lato tx e lato rx.
Bellissimo progetto e molto interessante ma mi sorge solo un dubbio.
Non si potrebbe fare anche utilizzando un semplice arduino mega e una adafruit motorshield per controllare i motori.
La motor shield è in grado di controllare 4 motori DC contemporaneamente ed è abbastanza semplice da programmare.