
Di seguito verrà spiegato il meccanismo biologico di funzionamento del muscolo; per comodità si prenderà in considerazione l'arto superiore, e si spiegherà l'applicazione di Arduino e del Muscle Sensor Kit, al fine di approfondire l'aspetto protesico nel campo biomedicale. Nel prossimo articolo verrà inserito, invece, il codice sorgente adattato per stabilire la comunicazione tra Arduino e muscolo e verrà presentato il progetto biomedicale da cui l'articolo ed il codice prendono spunto. Di questi, lo sviluppo di una protesi mioelettrica Open Source è uno dei progetti attivi.
Questo articolo vuole essere un'introduzione al prossimo che uscirà a breve e che riguarderà un progetto di cui la protesica mioelettrica è uno dei campi d'azione. Si è deciso di dividere il tutto in due parti e trattare qui l'argomento del funzionamento biologico di un muscolo e delle applicazioni della tecnologia mioelettrica nel campo della protesica per evitare un unico articolo troppo lungo e per approfondire in maniera adeguata un aspetto che vede una forte interazione tra elettronica e biologia.
In questo articolo, oltre all'approfondimento prettamente biologico, verrà spiegato l'uso del kit Muscle Sensor insieme ad Arduino, acquistabile dallo store Conrad.
Il kit Muscle Sensor può avere diversi applicazioni:
- Video games;
- Robots;
- Dispositivi medici;
- Elettronica indossabile;
- Esoscheletri.
L'applicazione che andremo a trattare sarà quella riguardante i dispositivi medici, per essere più precisi, biomedicali.
Andiamo quindi per gradi e iniziamo ad approfondire l'aspetto medico/biologico di un muscolo generico.
Biologia del muscolo
Per comodità verrà preso in esame il muscolo dell'avambraccio ma il funzionamento biologico è comune a tutti i muscoli del corpo.
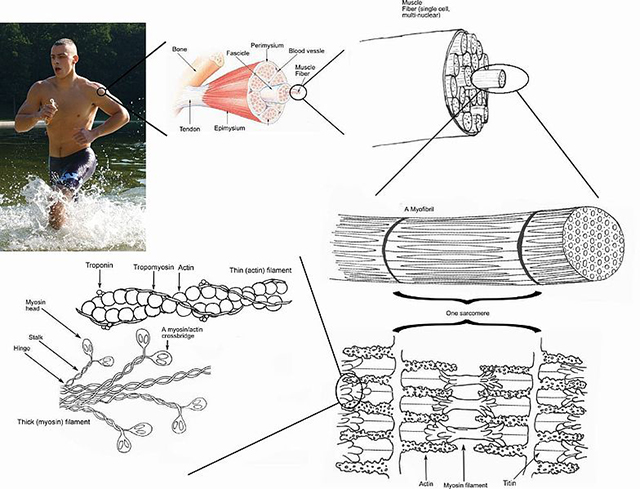
Il muscolo è un organo costituito da tessuto muscolare con proprietà contrattili. Ci sono diversi tipi di muscoli, distinti in base alle proprietà del tipo di tessuto muscolare che lo costituisce: quello preso in esame appartiene alla categoria dei muscoli striati scheletrici.
Come si può vedere dall'immagine sopra, questo tipo di muscoli è costituito da unità di fibre muscolari di forma allungata, detti sarcomeri, che si contraggono in seguito agli impulsi nervosi inviati dai motoneuroni. Un sarcomero è costituito a sua volta da tue tipi di filamenti che, in fase di contrazione, sono collegati tra loro:
- Filamenti di actina;
- Filamenti di miosina.
La contrazione muscolare si può dividere in tre fasi principali:
- Contrazione;
- Rilassamento;
- Fase latente.
Molto sinteticamente, la contrazione avviene quando uno stimolo elettrico, proveniente dai motoneuroni, arriva ai bottoni sinaptici, i quali liberano il neurotrasmettitore acetilcolina che apre i canali del sodio e depolarizza la membrana plasmatica delle fibre muscolari. Questa prima depolarizzazione dà origine ad un potenziale d'azione di 70mV che, propagandosi lungo la fibra, permette la diffusione di ioni calcio e quindi l'unione di actina e miosina con una precisione di 45°.
Nella fase di rilassamento il procedimento è sostanzialmente eseguito al contrario. Ciò che varia sono i neurotrasmettitori coinvolti, specifici nell'inibire il rilascio di acetilcolina.
La fase latente è la fase successiva allo stimolo in cui il muscolo deve riadattarsi al potenziale di origine. In questa fase, le fibre muscolari non sono in grado di ricevere un nuovo stimolo a meno che il nuovo impulso non sia superiore a quello ricevuto precedentemente. In alcuni casi, il muscolo è sottoposto anche ad un periodo refrattario durante il quale le fibre muscolari non sono in grado di rispondere a nessun tipo di stimolo, anche di forte entità.[1]
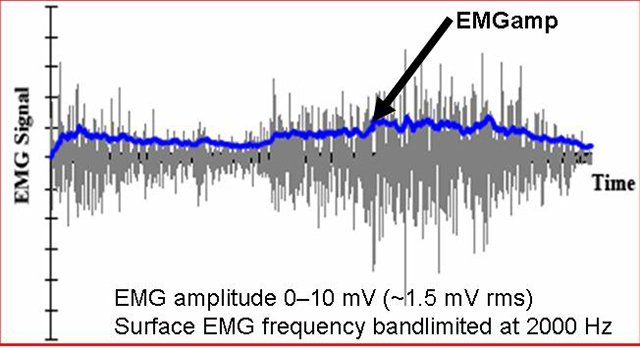
La fase di contrazione può essere monitorata tramite tracciato EMG (elettromiogramma). L'elettromiografia misura i potenziali d'azione che si generano durante la contrazione volontaria di un muscolo. Questo esame viene effettuato normalmente grazie all'uso di elettrodi superficiali che amplificano e registrano l'impulso nervoso.
Essendo depolarizzazioni della membrana cellulare, un singolo potenziale d'azione corrisponde, nel caso dell'uso di elettrodi interni, all'attività di una singola unità motoria (un'unica fibra muscolare collegata ad una terminazione nervosa) oppure, nel caso di elettrodi superficiali, ad un gruppo di unità motorie.
Di seguito possiamo vedere un elettromiogramma normale.
Come si è detto ad inizio articolo, stiamo prendendo in considerazione solo i muscoli dell'avambraccio poiché sono quelli interessati per l'uso di una mano protesica.
Nell'immagine seguente si possono vedere i muscoli soggetti ai diversi movimenti della mano.
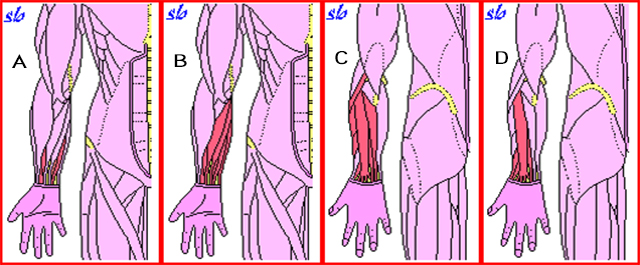
- IMMAGINE A. Flessione delle dita: flessore profondo e superficiale delle dita; flessore lungo del pollice;
- IMMAGINE B. Flessione del polso: grande palmare; cubitale anteriore; flessore profondo e superficiale delle dita;
- IMMAGINE C. Estensione del polso: 1° e 2° radiale esterno; cubitale posteriore; estensore comune delle dita;
- IMMAGINE D. Estensione delle dita: estensore comune delle dita; estensore proprio dell'indice e del mignolo.[3][4]
Dopo questo approfondimento, possiamo passare a parlare della reale applicazione della tecnologia usata per effettuare l'EMG in campo biomedicale con le nuove board affiancabili ad Arduino.
Muscle Sensor Kit
Tenendo in considerazione tutto ciò che è stato detto finora, siamo in grado di comprendere il funzionamento che c'è alla base dell'EMG e quindi passare a spiegare le caratteristiche del Muscle Sensor Kit. Questo è composto da:
- Board;
- Cavetti (Blu, Rosso, Nero);
- Elettrodi.
Il kit è in grado di misurare il potenziale elettrico di ogni muscolo creando un tracciato EMG. E' stato sviluppato per l'uso diretto con microcontrollori e, per questo motivo, i sensori non emetteranno un segnale EMG grezzo ma avremo un segnale amplificato, rettificato e ripulito che riuscirà a lavorare in modo ottimale con l'ADC del microcontrollore.
Le caratteristiche tecniche della board sono le seguenti:
- Dimensioni ridotte: 25,4 x 25,4mm;
- Connettore cavetti 3,5mm;
- Compatibile con breadboard;
- Alimentazione: min +/-3V (max 30V);
- Voltaggio segnale in uscita (rettificato e ripulito): 0V/+Vs (in base all'attività registrata nel muscolo).
Grazie a questa piccola board, affiancata ad Arduino, possiamo registrare e mostrare l'attività muscolare e può, inoltre, essere sfruttata per controllare pulsanti, modificare livelli, muovere joystick ed utilizzare protesi mioelettriche.
Per semplicità, si tratterà solo l'interfacciamento di Muscle Sensor board con Arduino. Nel prossimo articolo verrà mostrato l'interfacciamento specifico con una protesi.
Lo schema elettrico della board è molto semplice:
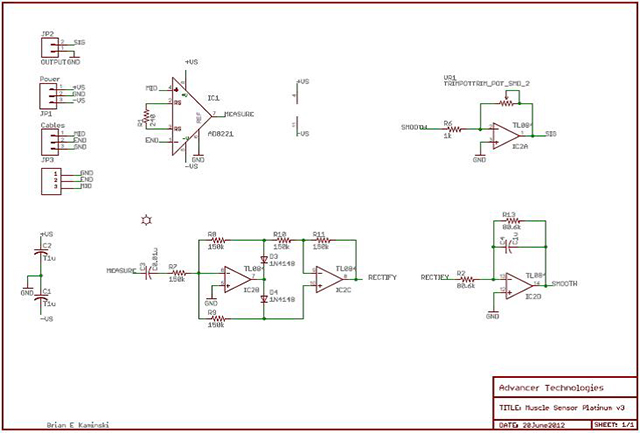
- Power è costituito da tre ingressi: +Vs/GND/-Vs;
- JP2 (OUTPUT) da due uscite: SIG/GND;
- Cables da tre ingressi (MID/END/GND) riuniti in un'unica presa da 3.5mm.
E' possibile collegare la board con Arduino in modo semplice e veloce come viene mostrato nell'immagine seguente
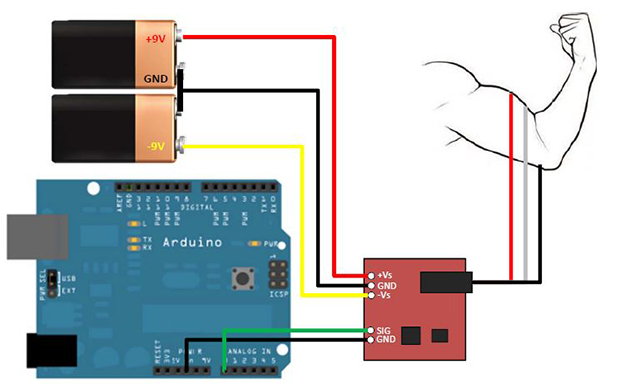
- Cavetto rosso+elettrodo a metà avambraccio interno;
- Cavetto blu+elettrodo in corrispondenza del polso;
- Cavetto nero+elettrodo in un punto non attraversato da muscoli (ad es. articolazione del gomito);
- Collegare il jack 3.5mm nell'apposita entrata.
A questo punto basterà collegare il pin SIG e GND della board rispettivamente con un pin analogico (A0) e GND di Arduino.
In allegato troverete i codici di esempio per Arduino.
Conclusioni
Al giorno d'oggi, il controllo di dispositivi tramite sensori interfacciati con il sistema nervoso umano sta prendendo sempre più il largo. Un esempio più sofisticato è Myo, un bracciale con il quale è possibile controllare, tramite Bluetooth 4.0 Low Energy e sensori EMG, diversi dispositivi.
Con questo articolo si vuole dare una base medica/biologica, oltre che elettronica, da cui partire per poter anche pensare di sviluppare da sé nuove applicazioni.
Nel campo biomedicale questa tecnologia consente di agevolare i portatori di protesi e di rendere più facile la loro vita quotidiana. Ma per approfondire ciò aspettate il prossimo articolo in cui si parlerà di un progetto molto ampio nato da pochissimo, totalmente italiano, PRIMO in Europa nel suo genere.
Non vi resta che rimanere aggiornati per il prossimo articolo e, se vi è piaciuto questo, condividete su Facebook, Twitter, Google+ affinchè tutti conoscano questa tecnologia affascinante.
Bibliografia
[1] [3] M. Bentivoglio, Anatomia umana e Istologia, Edizioni Minerva Medica 2010, Torino.
[2] Ted Clancy
[4] Besport
Allegati


{kind=link}
Articolo davvero interessante.
Non ho ben capito una cosa, come è possibile agevolare un portatore di protesi se egli, appunto, non possiede una parte dell’arto e quindi non posso applicare gli elettrodi in quel punto?
Ti rispondo subito.
Innanzitutto grazie per il complimento. Gli elettrodi vengono applicati, nel caso della mancanza della sola mano, sull’avambraccio (e non sulla mano perché appunto manca) poiché lì si trovano le terminazioni nervose dei muscoli che comandano la gestualità della mano. In caso di mancanza fino al gomito, gli elettrodi si mettono invece sul pettorale (destro o sinistro a seconda dell’arto), bicipite/tricipite e, a volte, anche sulla spalla. Questo è possibile perché anche con la perdita (o mancanza) di un arto, le terminazioni nervose sono comunque presenti come anche la sensazione dell’arto. Con degli elettrodi e un amplificatore si può bypassare la parte mancante e collegare le terminazioni nervose dei muscoli “precedenti” con la protesi.
Un articolo interessantissimo, complimenti all'autore.
Riescie a riassumere in maniera semplice argomenti innovativi e eterogenei come l'integrazione elettronica/biologia.
Complimenti ancora.
Ti ringrazio per i complimenti, resta aggiornato per il prossimo articolo 😉
Ciao, ottimo articolo, complimenti!
Qualche mese fa su EOS si parlava anche di Myo e delle ricerche della Microsoft nel campo delle "muscle-computer interfaces".
Noi di BESOS stiamo lavorando per fornire ai makers, ai ricercatori, agli innovatori, agli artisti e a tutti gli entusiasti dell'Open Source gli strumenti per realizzare sistemi di Natural User Interface (NUI) che permettano di interagire con i dispositivi elettronici di uso quotidiano attraverso i propri segnali fisiologici…
I campi d'azione di BESOS e "openbiomedical" (Cristian ti ho "googlato" :D) sembrano essere molto simili… Let's keep in touch ;D
Ti ringrazio Luigi! 🙂
Sono venuto a conoscenza di Myo qualche settimana fa e mi sono innamorato! 😀
Non pensavo ci fosse una realtà come voi in Italia, ottima cosa! Noi come Open Biomedical Initiative stiamo cercando collaborazioni, a maggior ragione se sono organizzazioni italiane! 😉
Anch’io stravedo per Myo. Magari il video di presentazione è un po’ “pompato” ma ha le caratteristiche per essere una tecnologia rivoluzionaria.
Per ora siamo in pieno “work in progress” ma stiamo lavorando sodo per raggiungere gli obiettivi prefissati. Ho visto che anche voi siete “giovani”… potremmo aiutarci e crescere insieme 😀
Mi accodo agli altri: molto bravo.
Quando uscirà il prossimo?
Esattamente, Luigi 😉
Giovanissimi, 2 mesi dalla nascita 😀
Siamo “work in progress” anche noi e cerchiamo di instaurare collegamenti con tutti quelli che vogliono collaborare. Sicuramente può nascere un’ottima collaborazione, i punti in comune tra di noi sono tanti ;D
Grazie mille Giorgio! 🙂
Il prossimo uscirà nelle prime settimane di Maggio, a seconda dei tempi di revisione 😉
salve, non trovo il seguito dell’articolo..
Complimeti davvero, sono ansioso di leggere i prossimi articoli!
Grazie mille Ivan, i complimenti fatti da un mastino di EOS come te valgono doppi! 😉 Stay tuned 😉
Ora che li ho letti per bene, tutti, posso dirlo.
Complimenti davvero: è tra i migliori in gara!
Grazie ancora Giorgio! 🙂
Alla fine conterà la classifica in ogni caso, indipendentemente da chi sia il migliore. Spero di vincerla perché sarebbe molto utile per portare avanti la mia causa 😉
Articolo bel organizzato e semplice da capire, complimenti! CristianPadovano dato che è la prima volta che leggo questo blog, vorrei sapere dove posso trovare gli allegati che hai messo a disposizione con questo articolo.
Allegati OK
Grazie della segnalazione 🙂
Super veloce Emanuele! 😀
Grazie mille Sonny! Presto, molto presto, pubblicherò un articolo su questo filone tendente al biologico con rimandi alla stampa 3D 😉
Salve, articolo davvero interessante, complimenti! Volevo chiedere una cosa. Sarebbe possibile, dopo aver effettuato i collegamenti spiegati sopra, collegare il tutto a un piccolo motore elettrico (e ovviamente farlo funzionare)che appunto utilizzi come energia quella delle pile e funzioni attraverso gli impulsi muscolari? Se sí, bisogna utilizzare per forza Arduino o si può collegare il piccolo motore elettrico direttamente alla “board rossa”? Grazie mille in anticipo!