Il progetto che vado ad illustrare riguarda un sensore magnetico triassiale ad alta sensibilità mirato ad essere utilizzato in un sistema per la tomografia geofisica computerizzata.
Prima di proseguire con l’articolo, è bene dare almeno la definizione di tomografia geofisica magnetica al fine di inquadrare la destinazione d’uso del sensore.
Da Wikipedia: “Per tomografia (dal greco témnó, tagliare, o tómos, nel senso di "strato", e gráphó, scrivere) si intende la tecnica spettroscopica mirata alla rappresentazione del corpo umano o di campioni a strati, in contrapposizione alla radiografia convenzionale la quale dispone sulla superficie bidimensionale della lastra tutto lo spessore del corpo o oggetto. La tomografia trova impiego soprattutto in medicina, ma anche in archeologia, geofisica, chimica e scienze dei materiali”.
In particolare, la tomografia geofisica prevede l’analisi della composizione di un provino o carota geofisica sottoposta ad un campo elettrico o/e magnetico. Si osserva cioè come un campo elettromagnetico viene influenzato in modulo e verso dalle componenti e dai materiali che caratterizzano il provino.
Un tomografo magnetico prevede l’utilizzo di un cilindro contenente il campione geofisico da analizzare, percorso lungo il suo asse da un cavo metallico ben teso e attraversato da corrente. Per la legge di Biot-Savart, la corrente nel filo darà origine ad un campo magnetico uniforme le cui linee di campo sono concentriche all’asse del filo stesso. Se la corrente è ben nota e lo è anche il raggio del provino, è possibile determinare l’ampiezza del campo magnetico alle pareti del cilindro. Se il campo magnetico viene prodotto non in aria ma attraverso una miscela di materiali con particolari proprietà paramagnetiche (tipiche del singolo elemento della miscela), le linee di campo, prima di raggiungere le pareti del contenitore cilindrico, vengono deviate o diffuse. La descrizione vettoriale nello spazio della deformazione del campo può avvenire misurando, lungo le pareti del cilindro campione, l’intensità del campo scomposto nelle tre componenti x, y,e z. La figura che segue esemplifica quanto finora illustrato riguardo la tomografia geofisica magnetica.

In un tomografo siffatto, il cilindro contenente il campione sotto esame viene ripercorso lungo la sua lunghezza da un toroide coassiale costituito da n sensori magnetici triassiali, dove n è funzione della risoluzione spaziale di analisi che si vuole conferire allo strumento.
Lo scopo dell’articolo è dunque illustrare una soluzione per la realizzazione di una singola scheda sensore capace di misurare con adeguata precisione il campo magnetico propagato attraverso il campione, scomposto nelle tre componenti cartesiane x,y,z.
Descrizione del sistema.
Il sistema di analisi, nel suo complesso, dovrà quindi essere costituito da un cilindro in cui andare a contenere il campione da analizzare. Un cavo metallico percorso da corrente genererà un campo magnetico uniforme che andrà a propagarsi attraverso il provino. Per discriminare il campo magnetico somministrato da quello terrestre, si è pensato di rendere il campo generato dal filo lungo il cilindro sinusoidale e con una frequenza di 25Hz (il valore non è casuale, è sufficientemente lontano dai 50Hz di rete e ancora di più dai 100Hz, soglia minima prima di iniziare a considerare importanti effetti induttivi di mutuo/auto accoppiamento).

A seguire sono riportate le specifiche del sensore progettato:
- Range di misura: ±200nT (±2mGauss );
- Risoluzione: 200pT in ambienti non necessariamente schermati dal campo magnetico terrestre;
- Sensibilità del sensore, lungo le singole componenti, indipendente dai campi ortogonali e statici.
- Connessione dati al PC tramite protocollo RS232
- Interfacciamento I2C per l’interconnessione tra i differenti sensori costituenti la corona sensibile del tomografo magnetico.
A tal proposito sono stati utilizzati sensori magnetoresistivi (AMR) prodotti dalla Honeywell poiché, date le ridotte dimensioni (rispetto ai fluxgate, ad esempio) e l’elevata sensibilità (rispetto ai sensori ad effetto Hall) ai campi magnetici nel range imposto dalle specifiche, garantiscono un’elevata risoluzione geometrico-spaziale, requisito importante per applicazioni tomografiche.

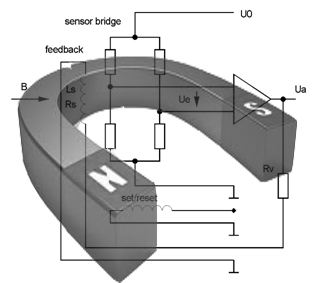
Senza entrare troppo nel dettaglio del principio di funzionamento di un sensore AMR, al momento ci basta sapere che si tratta di un particolare resistore costituito da una lega che gode della proprietà magnetoresistiva. Posizionando adeguatamente 4 resistori di questo tipo in un package plastico è possibile ricreare una configurazione a ponte di Wheatstone facile da condizionare analogicamente attraverso un amplificatore differenziale per strumentazione. Oltre agli elementi sensibili veri e propri, il package di ogni singolo sensore contiene al suo interno due piccoli avvolgimenti (on-chip, quindi 1-2 spire), uno di reset e l’altro di compensazione dell’offset. L’avvolgimento di reset, posizionato in modo che il campo magnetico generato abbia linee di campo ortogonali alla direzione preferenziale del sensore (non dimentichiamo infatti che si tratta di sensori altamente sensibili e direttivi), ripristina la posizione dei bipoli magnetici della lega magnetoresistiva riportando ai valori nominali sensibilità e direttività (se il sensore è sottoposto ad un campo magnetico che porta a saturare la sua dinamica di lettura (basta una calamita), i bipoli magnetici della lega che lo compongono tendono a variare la loro posizione compromettendo la sensibilità o la direttività del sensore stesso; prima di ogni ciclo di lettura è bene “ripristinare” sempre la posizione dei bipoli dando un impulso al circuito di eccitazione dell’avvolgimento di reset).
L’avvolgimento di offset si commenta nella sua denominazione, ovvero permette di generare un campo magnetico di offset da sovrapporre alla misura. Nel seguito dell’articolo verrà mostrato come questo avvolgimento sia di fondamentale importanza per rigettare la misura del campo magnetico terrestre.
Soluzione a feedback di campo
Tipicamente la dinamica di lettura di un sensore AMR, come per altri sensori con struttura a ponte di Wheatstone, viene esplorata e ampliata attraverso un amplificatore differenziale (meglio se per strumentazione ad alto CMRR). Questo approccio richiede però un’attenta valutazione dell’entità della tensione di offset all’uscita del sensore che, se non opportunamente compensata, limita la risoluzione del sistema complessivo. Ciò è dovuto al tetto massimo di guadagno imponibile al fine di evitare la saturazione della catena amplificatrice di condizionamento.
Al fine di compensare gli effetti dei campi statici sulla sensibilità del sensore, è stato implementato un circuito di retroazione di campo, sfruttando l’avvolgimento di compensazione precedentemente descritto.

Perseguendo l’approccio della retroazione di campo è possibile quindi ottenere un sensore compensato in continua (il campo magnetico terreste+offset) e sensibile al solo campo magnetico variabile a 25Hz propagato attraverso il provino.
Lo svantaggio di tale soluzione riguarda essenzialmente la variazione di sensibilità al variare della temperatura dovuta al calore prodotto per effetto Joule dalla corrente che passa nella retroazione. Questo effetto, tuttavia, può essere considerato trascurabile (la retroazione aiuta inoltre a compensare le derive termiche dei vari componenti). Inoltre è possibile trascurare l’effetto di mutuo accoppiamento tra i sensori (3, uno per ogni asse di lettura) risiedenti sulla stessa scheda poiché gli avvolgimenti di compensazione del singolo integrato sono ridotti alla geometria dei relativi sensori (l’HMC1002 integra due sensori in ortogonalità e i relativi avvolgimenti di compensazione nello stesso package, senza il timore di mutui accoppiamenti magnetici)


Lo schema riportato sopra mostra tutto il necessario per il condizionamento del sensore AMR per un singolo asse. Poiché la misura è triassiale, la scheda sensore complessiva disporrà di 3 circuiti siffatti. In particolare:
- Voutx+ e Voutx- rappresentano l’uscita del sensore AMR, ovvero i punti del ponte di Wheatstone soggetti a sbilanciamento a fronte di un campo magnetico esterno;
- OFFX+ è il positivo dell’avvolgimento di compensazione, il negativo è direttamente connesso a GND;
- OUTx è l’uscita del circuito di condizionamento che viene campionata dal microcontrollore dedito all’elaborazione dei segnali, previo filtraggio di tipo passa basso.
Nello schema, il trimmer R3 permette di variare il guadagno dell’intero stadio di condizionamento.
Filtro passa banda.
Come già anticipato, il microcontrollore deve essere in grado di campionare tre tensioni sinusoidali rappresentative della variazione del campo magnetico propagato lungo il provino sotto analisi. Per dare un’impronta al segnale da discriminare, il campo magnetico viene somministrato attraverso il provino ad una frequenza di 25Hz. All’uscita del circuito di condizionamento, la tensione da campionare viene dapprima filtrata con un filtro attivo passa banda del 4° ordine, perfettamente centrato attorno alla frequenza portante del campo misurato. A seguire lo schema del filtro attivo per singolo asse.

Amplificatore lock-in.
L’amplificatore lock-in analogico è un dispositivo che permette di misurare l’ampiezza dei segnali periodici in ambiente rumoroso migliorandone il rapporto segnale-rumore (PSD – Phase Sensitive Detection). L’ausilio di un amplificatore lock-in permette di ottenere un filtraggio del segnale di interesse con un fattore di merito anche superiore a 10000 (difficile da ottenere con un comune filtro attivo/passivo).

Realizzare un demodulatore di questo tipo in analogico può rappresentare una vera sfida progettuale. Molto più semplice è invece la corrispettiva versione digitale, implementabile semplicemente in un microcontrollore con architettura ad 8bit (per frequenze relativamente basse come i 25Hz della nostra applicazione).

Il segnale di riferimento per il Lock In può essere generato in quattro modi differenti, dai quali derivano altrettanti algoritmi di implementazione:
- Generazione interna al micro del segnale di riferimento attraverso l’utilizzo di una LUT;
- Campionamento tramite convertitore ADC di un segnale di trigger generato esternamente al circuito (nel caso in cui si tratti di una sinusoide);
- Variazione del segno del campione acquisito in funzione dello stato logico di un pin I/O eccitato da un segnale digitale esterno avente la stessa frequenza della portante di modulazione (nel caso di riferimento ad onda quadra);
- Generazione di un segnale di trigger per la sincronizzazione della scheda sensore con la corrente iniettata (senza far ricorso a PLL o circuiti di sfasamento)
Per l’applicazione specifica oggetto dell’articolo si è pensato di optare per la terza soluzione, più semplice da sviluppare (anche su architetture ad 8bit) e certamente più stabile rispetto a un blocco PLL per la sincronizzazione segnale/riferimento.
Microcontrollore
L’elaborazione del segnale in uscita dallo stadio di condizionamento dei sensori viene demandata ad un microntrollore a 8bit, nello specifico un PIC18F4423, in cui è implementato l’amplificatore lock-in nella sua versione digitale e il relativo filtraggio di tipo passa basso.
Il motivo per cui si è optato per il PIC18F4423 è da ricercare soprattutto nella risoluzione di 12bit del convertitore A/D messo a disposizione dal uC, in accordo con quanto richiesto dalle specifiche di progetto circa la risoluzione finale del sensore. Infatti, per ottenere una risoluzione di 200pT su un intervallo di misura di 400nT (±200nT), occorre un convertitore analogico digitale a 11bit minimo:

Il taglio standard disponibile per i convertitori A/D subito superiore a 11 bit è il 12 bit.
Nel firmware vengono inoltre configurate ed utilizzate le seguenti periferiche del µC:
- Periferica EUSART configurata per essere bene adattata al protocollo RS232 (tramite il quale verranno inviati i dati al PC);
- Periferica I2C impiegata per la comunicazione tra le schede costituenti lo scanner MERIT;
- Timer0 e relativo prescaler per la gestione hardware del periodo di campionamento dei tre assi.

Accorgimenti hardware lato microcontrollore
Lato µC, i dettagli dello schematico che vale la pena evidenziare riguardano principalmente la tensione di riferimento dell’ADC che è ricavata direttamente dalla tensione di alimentazione del ponte di Wheatstone dei sensori AMR (+/-5V) e dimezzata tramite due partitori resistivi e due buffer ottenendo una tensione duale di +/-2.5V.

In questo modo si effettua una misura ratiometrica in quanto una variazione sulla tensione di alimentazione del ponte si ripercuote con il medesimo peso sul riferimento dell’ADC.
Implementazione del Lock-in amplifier versione digitale.
Nella versione digitale dell’amplificatore lock-in, l’uscita dal filtro passabanda analogico viene campionata attraverso un convertitore A/D e viene successivamente moltiplicata per un segnale di riferimento sinusoidale (digitalizzato) alla medesima frequenza di modulazione del segnale campionato. Nel nostro caso, le componenti di campo magnetico variano alla frequenza di modulazione della corrente che genera il campo magnetico all’interno del provino (25Hz). Il segnale di riferimento adottato nel progetto, ai fini della demodulazione, è ricavato direttamente campionando la tensione sinusoidale che genera il campo magnetico nel provino alternativamente al campionamento del segnale che porta la misura del campo lungo un determinato asse. In questo modo si è certi che il segnale di riferimento sia effettivamente agganciato alla portante del segnale da demodulare e anche se i campionamenti dei due segnali non avvengono in contemporanea (perché il µC consente il campionamento di un canale per volta), lo sfasamento tra i campioni, pari ad un intervallo di campionamento, resta comunque costante e quindi ben compensabile tramite un adeguato fattore di scala (come si è visto, la componente continua che si estrae all’uscita del filtro passa basso è proporzionale al coseno dell’angolo di sfasamento tra il segnale modulato e il segnale di riferimento).

Il prodotto della demodulazione conterrà una componente continua la cui ampiezza è proporzionale alla misura del campo magnetico misurato e che si va ad estrarre tramite due filtri FIR passa basso in cascata: tale accorgimento permette di mediare i campioni su un intervallo di tempo abbastanza elevato senza per questo utilizzare buffer circolari troppo estesi che, dato il numero di campioni da dover mediare, non si riuscirebbero ad ottenere con la sola memoria dati interna al microcontrollore (circa 700Byte). Per aggirare il problema dell’occupazione di memoria, la media viene implementata in parte online (durante i campionamenti) e in parte offline (alla fine, prima di inviare il risultato via RS232). Nel nostro caso, il filtraggio LP è realizzato su due medie successive, una interna ogni 64 campioni e una esterna su 32 valori mediati. Il risultato è quello di ottenere una media complessiva su un intervallo di integrazione di 10sec utilizzando soltanto 192 celle di memoria RAM.
Sempre per facilitare l’estrazione dell’ampiezza del campo magnetico misurato e per minimizzare le operazioni svolte dal microcontrollore, si è fissata l’ampiezza del segnale di riferimento a 2.5V in modo tale che la sinusoide esplori tutta la dinamica del convertitore A/D (bipolare).
Il sincronismo tra le varie operazioni, compresi i campionamenti, viene ricavato attraverso l’interrupt di overflow del Timer0 configurato per funzionare a 8 bit, con prescaler 1:4 e come sorgente di clock la frequenza del quarzo esterno (4,096MHz).
Flowchart del firmware implementato nel microcontrollore

PCB - Bottom layer

PCB - Top layer

PCB - Silkscreen layer




Complimentoni!
Gran bel progetto!
Una curiosità, quanto tempo ci vuole per fare una analisi completa ?
Grazie Daniele! 😉
Ciao Livio, Grazie per i complimenti!! 🙂
Ti dico, il tempo per un’intera analisi dipende da diversi fattori, come la lunghezza del cilindro contenente il provino, il tempo utile al PIC per effettuare delle medie temporali sufficientemente lunghe da garantire un’adeguata reiezione del rumore bianco-1/f, la risoluzione spaziale richiesta dall’analisi. Ipotizzando un provino lungo 30cm e con una velocià di spostamento della corona sensori di 1cm/10s (imponendo una risoluzione spaziale di 1cm e una media su 10 secondi ad ogni spostamento della corona)allora occorreranno 5 minuti per un’analisi completa del provino. Ora sto facendo delle prove riducendo alla metà l’intervallo temporale su cui effettuo le medie, guardando a cosa accade in termini di prestazioni e capacità di reiezione del rumore.
Sarei molto curioso di vedere quali immagini si ottengono alla fine.
Sono tomografie tipo TAC ?
Si, qualcosa di simile, ma al momento sto ancora curando l’interfaccia grafica e mettendo a posto qualche bug sull’intercomunicazione tra le schede (bus I2C). Quando avrò le prime immagini “decenti” le publicherò!! 😉
Buongiorno
Complimenti per il suo progetto
Da molti anni sono alla ricerca di uno strumento che analizzi la temperatura interna di un corpo di plastica riscaldato intorno ai 100°C
Credo che con la sua applicazione sia possibile ricavarne la distribuzione del calore al variare del campo magnetico.
Sarei molto curioso di vedere la tomografia; l’applicazione a livello industriale potrebbe essere estremamente interessante
Cordiali saluti
Cristian