
Nel precedente articolo sono stati trattati gli aspetti biologici e le applicazioni nel campo biomedicale di un'interfaccia mioelettrica, citando soprattutto l'uso di quest'ultima nello sviluppo di una protesi.
Nel presente articolo, invece, verrà discusso e delineato un quadro generale della situazione attuale riguardante i dispositivi biomedicali e verrà trattato lo sviluppo vero e proprio di una protesi meccanica per la mano con cenni all'implementazione di una possibile elettronica con Arduino.
In tutto il mondo, dai paesi più sviluppati a quelli emergenti, ci sono numerosi casi di malformazioni congenite e di incidenti che causano l'amputazione di arti.
Shea è una bimba di 9 anni del Wisconsin che ha chiesto a Babbo Natale una protesi che le permettesse di giocare come i suoi coetanei: è nata, infatti, con la mano destra dotata unicamente di palmo e pollice e alcuni movimenti, per molti banali, per lei sono impossibili. Liam, un bimbo di 5 anni del Sud Africa, vive la stessa situazione: è nato infatti con una sindrome chiamata "da banda amniotica" che gli ha causato l’amputazione delle dita prima della nascita. C’è poi Stephens, dodicenne di Moses Lake, che ha voluto una protesi per il suo arto mancante così da potersi sentire più simile ad un supereroe.
Shea, Liam e Stephens sono 3 dei 1500 bambini che ogni anno nascono con deformazioni agli arti superiori e l'80% di 30 mln di individui che hanno bisogno di una protesi ma non possono permettersela. Questo tipo di dispositivi, infatti, ha un costo elevato anche con poche funzionalità e la migliore alternativa per tutti è quella di fare uso di una protesi estetica completamente immobile o, nel peggiore dei casi, nulla.
Quest’ultima era la situazione iniziale di Shea fin quando sua madre, vedendo un video su YouTube di un professore della UNMC University che aveva stampato, tramite una stampante 3D, una mano giocattolo per il proprio figlio, ha deciso di contattarlo e chiedergli se avrebbe potuto fare lo stesso per sua figlia: stamparle un giocattolo che le avrebbe però cambiato la vita.
Da lì molte persone hanno iniziato a vedere nelle stampanti 3D, nel Web, nelle recenti modalità di comunicazione, nell'Open Source, la base per una rivoluzione in ambito biomedicale. Le stampanti 3D permettono, infatti, di stampare qualsiasi oggetto in diversi materiali (ABS, PLA, Nylon, etc.) scaricando, spesso in modo gratuito, i file in formato STL, realizzati tramite software di grafica (Blender, SketchUp tra i più semplici).
La Biomedica è partita dalla versione 1.0 con apparecchiature grezze, lente e ingombranti ed è arrivata oggi, complici lo sviluppo di tali tecnologie ed il costo via via sempre più basso, alla sua versione 2.0, nella quale troviamo dispositivi comodi, sofisticati e capaci di errori minimi. Una Biomedica che però è realizzata e diffusa da e nei paesi sviluppati.
La Biomedica 2.1 invece? E' quella trattata proprio in questo articolo, non sostitutiva della 2.0 ma integrativa, che cerca di affiancarsi alle grandi aziende per consentire la diffusione e lo sviluppo di dispositivi accessibili a tutti, indipendentemente dalla posizione geografica e dalla disponibilità economica, sfruttando l'animo umano e la forza del DIY e dell'Open Source.
Ed è proprio su queste basi che è nata l'Open Biomedical Initiative, un'organizzazione non-profit tutta italiana, volta alla realizzazione e alla diffusione di tecnologie biomedicali low-cost, Open Source e riproducibili tramite stampa 3D.
All’interno ci sono ingegneri, biotecnologi, medici, makers, curiosi, ma l’intento è di mettere in contatto quante più persone possibile, e da ogni parte del mondo per fare insieme la differenza. Ogni aiuto è prezioso e non importa quale sia il tuo lavoro, la tua posizione sociale, il luogo dove abiti: ogni persona può fare la differenza per una biomedica fatta da tutti, per tutti.
Il primo progetto di questa Iniziativa è una protesi meccanica dell’arto superiore dal costo di qualche decina di euro, il suo nome è First Hand.
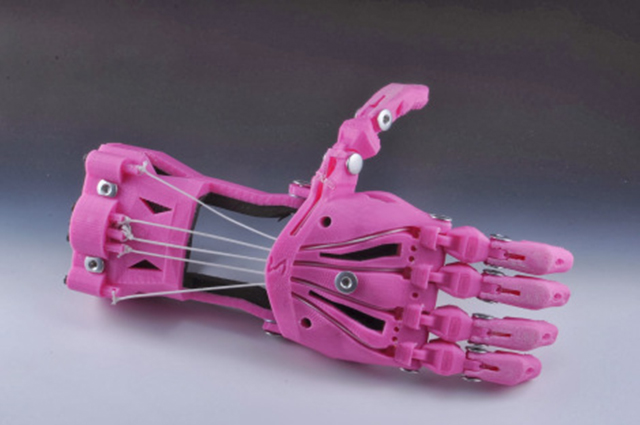
Una protesi meccanica ha un semplice funzionamento: tramite dei cavi elastici presenti nelle dita, e bloccati con dei tiranti sul supporto del braccio, è possibile, con un semplice movimento, chiudere la mano e compiere azioni che prima non erano possibili.
Qui di seguito verranno trattate le singole parti della protesi, la loro stampa e una breve spiegazione del loro montaggio.
Stampa 3D
I file per la stampa, presenti al link della cartella Drive, sono in formato STL. Questo tipo di file può essere aperto con Slic3r, un programma Open Source che permette l'esportazione del G-code utile ad eseguire la stampa. I modelli 3D sono stati già corretti per l'uso su stampanti di "fascia bassa" (è stata usata una RepRap), con normali configurazioni. I parametri principali della configurazione sono descritti di seguito ma per la configurazione completa si rimanda al file presente nell'archivio dei file di stampa, da caricare in Slic3r:
- Materiale: PLA;
- Layer height: 0,28mm;
- Fill density: 0,3;
- Consigliato il materiale di supporto;
- Diametro filamento: 3mm;
- Temperatura estrusore: 200°C (primo strato) e 210°C (strati successivi);
- Temperatura piano: 80°C (primo e successivi strati);
- Dimensioni piano: 200x200 mm;
- Zona di stampa: 100x100 mm;
- Diametro ugello: 0,37 mm.
I file sono pronti per la stampa ma devono essere prima ridimensionati singolarmente in base alle dimensioni dell'utente che userà la protesi. Per fare questo basta seguire questi passi per ottenere la percentuale di ridimensionamento da inserire nel tool "Scale" di Slic3r.
- Misurare la larghezza del dorso della mano a livello delle nocche (in millimetri);
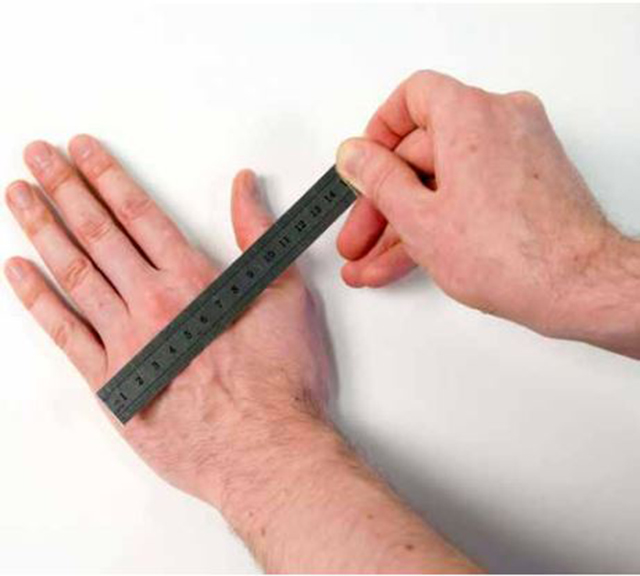
- Aggiungere 5mm alla misura;
- Dividere il risultato per 55mm (la misura standardizzata dei file);
- Moltiplicare il risultato per 100;
- Inserire la percentuale nel tool "Scale" e stampare tutti i file con lo stesso dato di ridimensionamento.
ATTENZIONE! Il file "Gauntlet+5M2" è già ridimensionato per una misura del dorso di 80 mm. Se la percentuale che si ottiene è minore del 130%, si potrebbe compromettere la struttura della protesi.
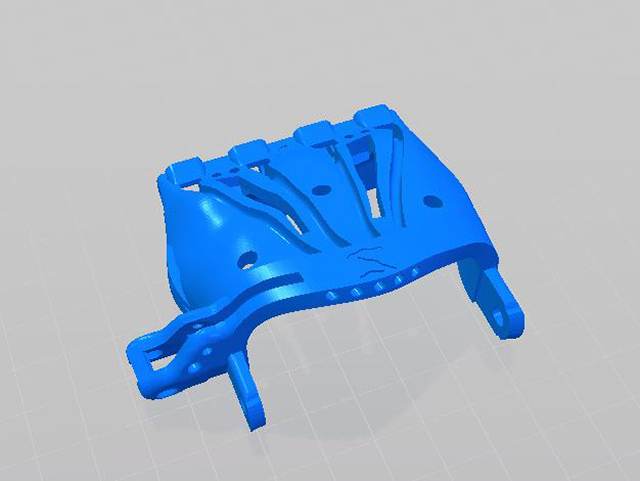
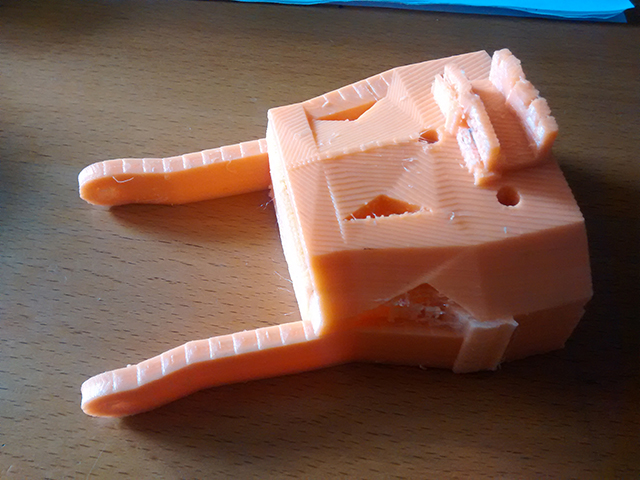
Parti della protesi
Qui di seguito saranno mostrate le varie parti della protesi già stampate e cercherò di spiegare in modo sintetico il loro montaggio e il funzionamento.
Il funzionamento di una protesi meccanica, come è stato detto, si basa sulla tensione e sull'elasticità di alcuni cavi presenti nelle dita.

Sviluppo elettronica
Nel precedente articolo si è parlato degli aspetti biologici ed elettronici di un'interfaccia mioelettrica. Come già detto, l'EMG (elettromiogramma) può essere utile nello sviluppo di nuove tecnologie NUI (Natural User Interface) che possano aprire nuove frontiere verso l'interfaccia utente-macchina.
Un'evoluzione della protesi appena descritta può essere, appunto, la versione mioelettrica su cui stiamo lavorando e che ora è in fase di prototipazione.
Come già spiegato, il segnale proveniente dai muscoli deve essere amplificato per poter risultare utilizzabile. Per fare ciò, una possibile soluzione è l'uso del Muscle Sensor Kit, sviluppato per tale scopo, insieme ad Arduino (acquistabile dallo Store CONRAD) e ad alcuni servomotori. Il nostro sviluppo si basa sul lavoro fatto per la Openhand, una protesi puramente mioelettrica. L'elettronica permette di amplificare il segnale muscolare per alimentare i motori e di ricevere un feedback da quest'ultimi quando l'oggetto viene afferrato.
Il collegamento tra Arduino, Muscle Kit ed elettrodi è stato già descritto e il codice per Arduino specifico per l'uso con motori si trova in allegato; al momento, viene sfruttata anche l'azione di alcuni pulsanti per effettuare alcuni movimenti. Il nostro intento è quello di rendere la protesi in grado di interagire con schermi capacitivi, quindi di sfruttare unicamente il segnale mioelettrico ed essere sempre meno ingombrante.
Un aspetto importante è rendere l'elettronica il più semplice possibile ma allo stesso tempo molto efficiente: per questo motivo si sta valutando l'uso di diversi sensori e tecnologie.
Conclusioni
Lo sviluppo di una protesi meccanica è molto semplice e ogni utente può accedere ai file e poterli migliorare, ma si devono avere delle attenzioni particolari per garantire un prodotto low-cost e dalla buona qualità a chi purtroppo ha alcuni limiti nei movimenti e delle difficoltà economiche.
Io e tutte le persone di Open Biomedical Initiative ci impegniamo affinché questo possa accadere, con uno spirito completamente non-profit e Open Source volto a migliorare le possibilità di ogni persona che vuole darci fiducia.
L’Open Biomedical Initiative sta cercando di agire seguendo diverse strade ma la vera forza del progetto è ogni utente che si unisce a noi. Stanno, infatti, nascendo importanti collaborazioni, sempre più persone si stanno unendo e questo non fa altro che aumentare le nostre convinzioni e ci spinge a fare sempre di più.
Ripropongo l'invito, se vi è piaciuto l'articolo, a condividere su Facebook, Google+, Twitter per darci la possibilità di vincere la stampante in palio e continuare sempre più velocemente con il nostro progetto, e affinché sempre più persone possano conoscere lo sviluppo di una protesi e, magari, contribuire loro stessi alla felicità di ogni persona in difficoltà.
Riferimenti


Non sapevo niente di questo progetto, è stata una lettura istruttiva. Complimenti all'autore.
Eheh siamo nati da poco come organizzazione ma abbiamo raggiunto già diversi obiettivi contro ogni pronostico 😉
Ce la mettiamo tutta per una biomedica per tutti e questo è solo un assaggio dei progetti che abbiamo in corso, speriamo di vincere e usare la stampante per portare avanti tutto. Resta aggiornato sul sito e sulla pagina Facebook 😉
E grazie dei complimenti! 😉
Vi segnalo questo articolo:
http://www.3ders.org/articles/20140513-12-year-old-haitian-orphan-gets-nation-first-3-d-printed-prosthesis.html
Penso possa interessarvi 🙂
Grazie Piero della segnalazione 🙂
Eheh questa è Robohand, si sta espandendo anche ad altri Paesi oltre al Sudan a quanto pare! 🙂
Noi abbiamo contatti in India, Francia ed Arabia Saudita 😉
voglio fare una domanda, anche se mi rendo conto che è stupida.
Ma non cambia niente da un modello ad un altro, dato che le mani possono essere di dimensioni diverse?
Domanda legittima! 😉
Beh cambia, a parte l’estetica, sopratutto la funzionalità generale. Ti spiego: il meccanismo di azionamento della protesi è sempre lo stesso ma variando alcune parti della protesi (dimensioni, linea della parte, posizione) si possono migliorare le caratteristiche, quindi maggiore grip, chiusura, resistenza, indossabilità e simili. La dimensione della mano è relativa, serve solo a rendere la protesi più facile da indossare nel tempo.
Spero di averti risposto 🙂
Salve sono un Ing. Biomedico , grazie ai miei studi e alla mia disabilità motoria ho realizzato e ideato alcuni progetti molto utili e funzionali , purtroppo trovandomi da solo non riesco a sviluppare il tutto quindi sto cercando collaborazioni.
Mi piacerebbe sapere di più sul vostro gruppo e magari tenere un contatto con voi.
Salve, certamente!! 🙂 L’ho aggiunta su Facebook ma se preferisce la mail questo è il mio indirizzo al quale mi può contattare: [email protected] 😉
Il link con i files per la stampa non funziona più, porta ad una cartella vuota