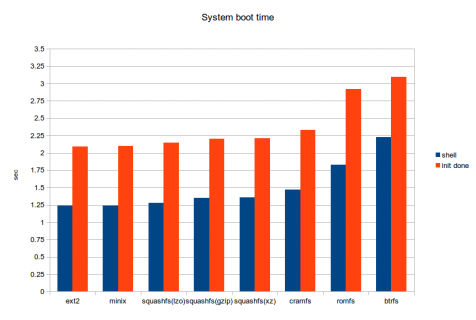
Tutti noi siamo diventati sempre più esigenti. Vogliamo sistemi molto performanti, estremamente potenti ed immediatamente pronti all’uso. Spero per ottenere questi risultati serve un lavoro a basso livello. In questo articolo verranno illustrate alcune tecniche per identificare, misurare e ottimizzare la fase di boot della Raspberry Pi, e renderla ancora più performante.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3665 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:

Come integrare dispositivi IoT nella rete IOTA
Altimetro barometrico: fondamenti di progettazione
Una panoramica sulla modellazione matematica dei veicoli elettrici
Selettore di colore su Web Server per controllare LED RGB con ESP32

Firmware 2.0 #49: Test & Measurements/Analog & Digital Signals

Confesso di aver comprato Raspberry Pi quando ne avete iniziato a parlare perchè mi avete incuriosito ma finora non ci ho mai fatto nulla di serio. Qualcosa tra gli esperimenti predisposti da Lucas ma poco più…
Questo potrebbe essere un bell’esperimento anche perchè certamente mi porterà a scoprire cose che non conosco 🙂
Ottimo articolo arighi!
Senti ma se poi smanettando dovessi far pasticci posso contare su di te? 🙂
Grazie, mi fa piacere che l’articolo ti abbia incuriosito. Allora, pasticci troppo grossi sulla RPi in genere non se ne dovrebbero fare… al limite basta ri-flashare l’SD card per tornare ad uno stato funzionante. 🙂
Ad ogni modo sentiti libero di contattarmi mandando un messaggio o postando un commento qua sotto se hai bisogno di aiuto o riscontri errori, problemi, etc. nel seguire i passaggi riportati sopra.
Leggendo leggendo c’è una cosa che non ho capito e che mi son dimenticato di chiedere. Hai scritto
1 / 100 ms = 250 ms
ehm… come?! 🙂
Esatto, ottima domanda, grazie!
In effetti me l’aveva fatto notare anche Piero Boccadoro. Il fatto e` che qua ho saltato un bel po’ di passaggi e l’espressione non e` un’uguaglianza ma il risultato di un’approssimazione.
Vediamo di chiarire. Ovviamente con CONFIG_HZ=100 la singla attesa di un tick richiede 1 / 100 s = 10 ms. Tuttavia il kernel per fare una valutazione piu` precisa del numero di loop che la CPU riesce a fare in un jiffy, reitera l’attesa piu` volte nella funzione calibrate_delay(), effettuando una prima fase di calibrazione e successivamente una fase di approssimazione binaria, fino a che non si converge ad un valore sufficientemente attendibile. Di tali attese da 10ms se ne possono fare fino ad un massimo di 27, per cui la calibrazione potrebbe richiedere fino a 270 ms, quindi in prima approssimazione l’attesa e` dell’ordine di 250ms.
I dettagli della procedura si possono trovare nella patch che ha introdotto il parametro di boot lpj, utilizzato per fare il preset dei loops per jiffy: http://lwn.net/Articles/93125/
Questo argomento è stato trattato al Better Embedded.
Nonostante per adesso non ho la possibilità di parteciparci lo tengo d’occhio.
Ottimo Articolo!
Ah… ok.
Ora è chiaro 😀
Grazie per la precisazione.
Ciao sono Franco della Alius non sono riuscito ancora a trovare documentazione su Raspberry, schema elettrico, pinout etc. dove si possono trovare?
per esempio qui: http://goo.gl/gbrfWG
ciao
E’ arrivata oggi! Dopo quarant’anni, voglio riprovare a programmare personalmente!
Ho cominciato ai albori dell’informatica, ma poi il lavoro mi ha condotto altrove.
Per capirci, ho cominciato con computer con memorie magnetiche, dopo qualche anno ho avuto a disposizione un Pc con un HD da 20 Mega, ed 1 Mega di clock, costava come un utilitaria . Comunque allora, neanche Asimov avrebbe concepito un Raspberrj