Sviluppato in origine per i sistemi integrati delle automobili, il bus CAN (Controller Area Network) è oggi utilizzato in numerosi settori come trasporto, apparecchiature mobili, apparecchiature mediche, edilizia, controllo industriale. I punti forti del sistema CAN sono il sistema di allocazione del bus e il rilevamento degli errori. CANopen specifica il protocollo di livello più alto ed è basato sul bus CAN.
L’avvento dei processori e l’evoluzione dell’elettronica e dell’informatica, abbinati alla pneumatica, hanno contribuito a un progressivo sviluppo di sistemi che fossero in grado di ridurre drasticamente i costi dovuti agli assemblaggi e ai cablaggi elettrici. Partendo da OSI come modello di riferimento, sono nate decine di bus di campo diversi tra loro. Alcuni di questi si sono affermati sul mercato e sono diventati degli standard. In un impianto che utilizza un protocollo standard, anche se i nodi sono realizzati da costruttori diversi, essi possono comunicare facilmente tra loro. Non vi è nulla che impedisca a un costruttore di ideare e realizzare un protocollo in base alle proprie esigenze, ma questo sicuramente impedisce l’utilizzo, nell’impianto di un bus di campo, di nodi di altri costruttori. Nel settore automazione con aria compressa, le batterie di elettrovalvole sono integrate nel nodo e, utilizzando i principali protocolli standard, è possibile inserirli in rete assieme a dispositivi con altre funzionalità, a condizione che il protocollo usato sia il medesimo. I principali protocolli standard sono:
- Interbus;
- Profibus;
- CANopen;
- DeviceNet;
- AS interface.
I protocolli standard differiscono tra loro per alcune caratteristiche tecniche quali:
- tipologia della rete;
- tipologia di comunicazione;
- velocità di trasmissione;
- numero dei partecipanti, master compreso;
- lunghezza della rete;
- mezzo di trasmissione.
La struttura in linea è la più utilizzata nei bus di campo. I vari nodi sono collegati in parallelo appesi alla stessa linea. Questa caratteristica permette ai nodi di funzionare anche se alcuni di questi in quel momento non sono partecipanti attivi per svariati motivi. È molto utile in fase di manutenzione oppure nel caso in cui, per motivi produttivi, sia necessario che funzioni solo una parte dell’impianto. La rete è facilmente ampliabile in qualsiasi punto. Questa struttura viene utilizzata dai protocolli Profibus, CANopen e DeviceNet. Il sistema CAN (Controller Area Network) è stato sviluppato da Bosch allo scopo di ridurre drasticamente il cablaggio all’interno di autoveicoli. Il bus è molto veloce perché il protocollo di comunicazione è semplice e i messaggi sono brevi. L’uso del CAN dal settore automobilistico si è esteso a tutti i settori industriali e in modo particolare verso il livello basso di sensori/attuatori.
A differenza dei moduli Profibus e Interbus che vengono acquistati completi, in questo caso si possono comprare microprocessori da commercio e, utilizzando le specifiche di ogni protocollo, scrivere il software. Partendo dal CAN Bosch, nascono vari protocolli standard, i cui due più importanti sono CANopen e DeviceNet. CANopen è tra tutti i bus di campo quello maggiormente in espansione. L’ente di riferimento è la CIA (CAN in Automation) che ha sede in Germania. In una rete CANopen a ogni dispositivo deve essere assegnato un indirizzo, e questa operazione avviene nella fase di installazione. È necessario settare anche il baude rate che deve essere uguale per tutti i nodi e deve tenere conto della lunghezza della linea. Ogni costruttore deve fornire un file EDS (Electronic Data Sheet) allo scopo di descrivere le caratteristiche del dispositivo e quali siano gli oggetti implementati. Anche in questo protocollo è possibile scollegare un nodo senza che la comunicazione sia interrotta agli altri partecipanti attivi.
Caratteristiche:
- protocollo secondo norme ISO 11898 EN 50325;
- struttura master/slave;
- velocità di trasmissione da 10 kbit/sec a 1 Mbit/sec;
- numero massimo di partecipanti 128;
- tipo di collegamento in linea;
- interfaccia seriale RS 485 con 2 fili e comune;
- distanza massima del bus. La rete CANopen è basata su una struttura master/slave per la gestione del bus ed è costituita da un master e da uno o più slave.
Il master esegue le funzioni seguenti: inizializzazione degli slave, supervisione degli slave, inoltro delle informazioni di stato sugli slave. Il protocollo CAN consente a ogni nodo di avviare la trasmissione di un pacchetto dati quando il bus è a riposo. Se due o più nodi avviano la trasmissione di pacchetti dati allo stesso istante, il conflitto d’accesso al bus viene risolto per “arbitrage de contention” utilizzando l’identificatore incluso nel pacchetto dati. L’emettitore che ha l’identificatore a più alta priorità ottiene l’accesso al bus, i pacchetti degli altri emettitori saranno automaticamente ritrasmessi più avanti. Questo arbitraggio utilizza uno stato recessivo e uno stato dominante sul bus e viene eseguito alla trasmissione di ogni bit. Ogni emettitore testa lo stato del bus durante la trasmissione dei suoi bit; se viene trasmesso un bit recessivo e il bus è in uno stato dominante, l’emettitore “perde la mano” e arresta la trasmissione. In conseguenza di questo principio, durante la trasmissione di ogni bit, un segnale trasmesso ha il tempo di propagarsi fino al nodo più lontano e ritornare in uno stato dominante. È questa la ragione per cui il bus ha numerose limitazioni di lunghezza in funzione della velocità di trasmissione.
TIPOLOGIE DI RETE CANOPEN
La rete CANopen utilizza un cavo a coppia intrecciata per trasmettere i segnali differenziali. Il cavo è terminato a entrambe le estremità fisiche con resistenze da 120 ohm (indicate con LT nella Figura 1).
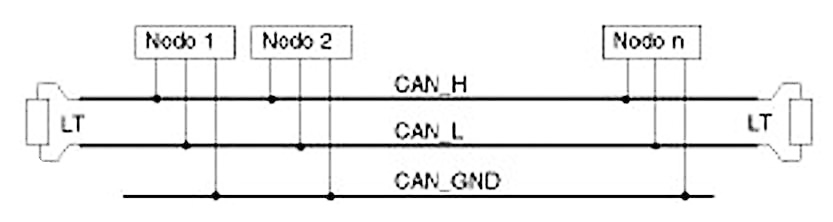
Figura 1: CanOpen bus
Un segnale di collegamento a massa separato viene utilizzato come riferimento comune per i nodi CANopen. La rete CANopen (Figura 2) è costituita da una linea di trasmissione che deve essere terminata a entrambe le estremità fisiche con resistenze di fine linea.
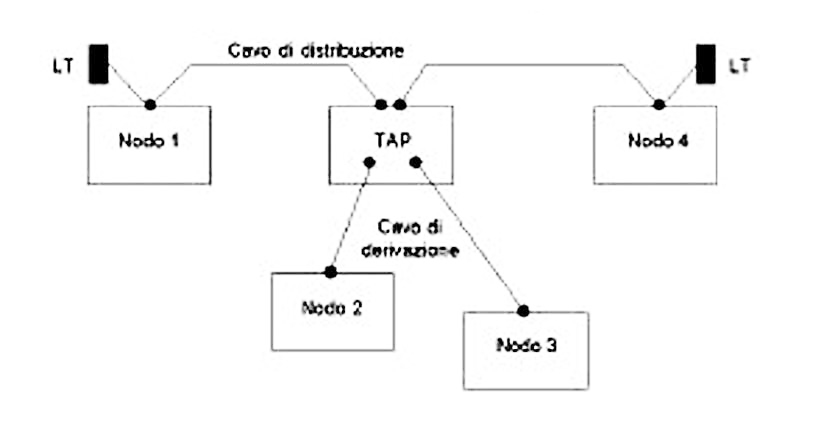
Figura 2: tipologia base
Un TAP in combinazione con cavi di derivazione forma una topologia a stella parziale. Per ridurre al minimo le riflessioni, utilizzare cavi di derivazione di lunghezza minima. La lunghezza massima dei cavi di derivazione dipende dalla velocità di trasmissione. La rete CANopen può essere costituita da un solo segmento o da più segmenti collegati fisicamente tra loro per mezzo di un ripetitore CAN. La Figura 3 fornisce un esempio di topologia che include un ripetitore.
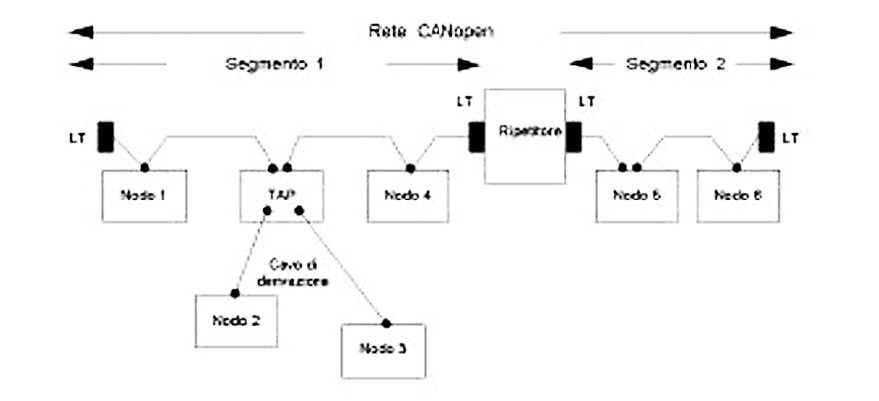
Figura 3: tipologia con ripetitore
Un ripetitore:
- aggiorna i segnali CAN, consentendo più di 64 nodi;
- può fornire isolamento tra i segmenti; ciascun segmento deve essere terminato;
- è trasparente dal punto di vista della rete poiché inoltra semplicemente i segnali CAN. Ciò significa che tutte le apparecchiature collegate al bus partecipano allo stesso arbitraggio;
- non permette di aumentare la lunghezza totale del cavo.
Il concatenamento del cavo da un nodo a quello successivo viene eseguito tramite i connettori del cavo in due modi diversi:
- collegando due cavi allo stesso connettore del cavo. Questa tecnica di concatenamento ampiamente utilizzata consente di scollegare il connettore del cavo dal dispositivo (ad esempio, per sostituire il dispositivo) senza interrompere la rete;
- collegando i due cavi a connettori singoli su dispositivi dotati di due connettori del cavo (nodo 5 nell’esempio precedente). Questa tecnica di concatenamento viene utilizzata in particolare per i dispositivi ad alta protezione (ad esempio, dispositivi IP67) o per i sistemi di cablaggio ottimizzati nel cabinet. È possibile suddividere una rete CANopen in sottoreti più o meno indipendenti tramite un bridge CAN (Figura 4).
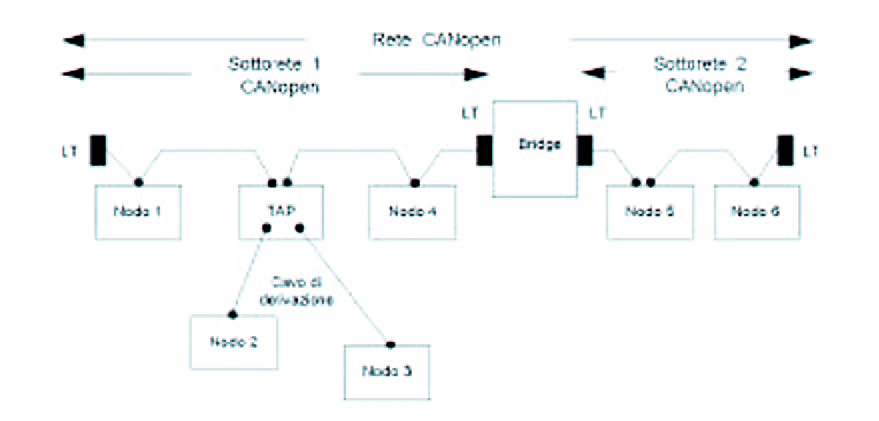
Figura 4: tipologia bridge
Di seguito sono elencate le funzioni di un bridge:
- separa la rete CAN complessiva in sottoreti più o meno indipendenti;
- fornisce un arbitraggio individuale per ciascuna sottorete;
- offre a ogni sottorete la possibilità di avere una propria velocità di trasmissione;
- è basato sul principio di archivia e inoltra, ovvero, i messaggi CAN vengono ricevuti da una sottorete e quindi inoltrati a un’altra sottorete;
- consente l’utilizzo di regole di traduzione e filtraggio;
- consente di effettuare l’adattamento di protocollo tra le sottoreti. Rispetto al ripetitore CAN, il bridge CAN consente di aumentare la dimensione massima della rete.

