
Il settore automotive, soprattutto dopo la recente spinta innovativa prodotta dai veicoli ibridi ed elettrici, richiede l'utilizzo di un sistema di alimentazione elettrica composto da più batterie, oltre alla tradizionale batteria primaria a 12 V. L'utilizzo di sistemi di rigenerazione della potenza, inoltre, impone un trasferimento di energia elettrica bidirezionale (dalla batteria all'utilizzatore e viceversa). In questo contesto svolgono un ruolo primario i convertitori DC-DC bidirezionali, utilizzati in diversi tipi di applicazioni quali i veicoli elettrici ibridi (HEV, acronimo di Hybrid Electric Vehicle), e i veicoli elettrici (EV, acronimo di Electric Vehicle). Nel corso dell’articolo analizzeremo un’applicazione basata sull’utilizzo di componenti commerciali per gestire un sistema di carica bidirezionale “48:12” (i valori delle tensioni delle due batterie utilizzate nell’applicazione).
Introduzione
L’introduzione di dispositivi atti a ridurre il consumo di carburante, come ad esempio il sistema start&stop (in cui il motore a combustione interna viene spento quando il veicolo è fermo o procede a velocità ridotta, per poi riaccendersi automaticamente quando riprende la marcia), richiede l’utilizzo di due sistemi di alimentazione a batteria. La tradizionale e familiare batteria al piombo-acido a 12 V, utilizzata per alimentare la maggior parte dei sistemi convenzionali presenti nel veicolo, viene in questi casi affiancata da una batteria al litio da 48 V per eseguire l’avviamento del motore. Questa batteria addizionale funge anche da serbatoio per immagazzinare l’energia prodotta dalla frenata rigenerativa. Nasce così la necessità di trasferire la potenza in modo bidirezionale tra le due batterie, in base alle esigenze specifiche del sistema complessivo.
SM72295
Questo convertitore è stato progettato per pilotare 4 transistor MOSFET di tipo N in configurazione full bridge, è in grado di fornire una corrente di picco di 3 A in modo tale da garantire una commutazione efficiente dei transistor, ed include due amplificatori di corrente (transconduttanza) con guadagno regolabile dall’esterno, in grado di ridurre le oscillazioni della corrente in uscita. In Figura 1 possiamo osservare l’evaluation board per SM72295, disponibile sempre da TI.

Figura 1: Evaluation board per l’SM72295 di TI
Il componente è nato per svolgere primariamente la funzione di driver full bridge nelle applicazioni in campo fotovoltaico, ma può essere utilizzato più in generale in tutte le applicazioni in cui sia richiesta l'operazione di caricamento di una batteria, come una normale batteria al piombo-acido da 12 V per impieghi automotive. In particolare, SM72295 si dimostra particolarmente adatto alle applicazioni di carica bidirezionale 48:12 con controllo digitale.
Le principali caratteristiche tecniche del convertitore, che lo rendono adatto a questo tipo di applicazioni, possono essere così riassunte:
- doppio monitoraggio della corrente, in grado di misurare sia la corrente sull’induttanza che sulla batteria a 48 V;
- monitoraggio della corrente di uscita per ridurre l’entità dell’errore;
- driver da 3 A sia per il lato ‘high’ che per il lato ‘low’ del full bridge;
- protezione hardware dalle sovratensioni con uscita logica in open drain e interruzione dell’operatività del driver;
- controllo dei gate indipendente per i lati ‘high’ e ‘low’, in grado di agevolare il controllo (tramite un microcontrollore) del dead time (periodo durante il quale nessun lato del bridge è operativo).
L’applicazione
Come esempio applicazione, prenderemo in considerazione un sistema di carica bidirezionale di tipo 48:12 basato sull’utilizzo di un SM72295 per il monitoraggio della corrente e il pilotaggio dei gate, e un microcontrollore ControlSTICK della serie C2000 di TI (si veda la Figura 2) con compiti di monitoraggio e controllo dell’alimentazione.

Figura 2: Il ControlSTICK basato sulla MCU F28069 Piccolo
Il sistema, che opera su due fasi distinte in modo interleaved (interlacciato), è schematizzato in Figura 3.
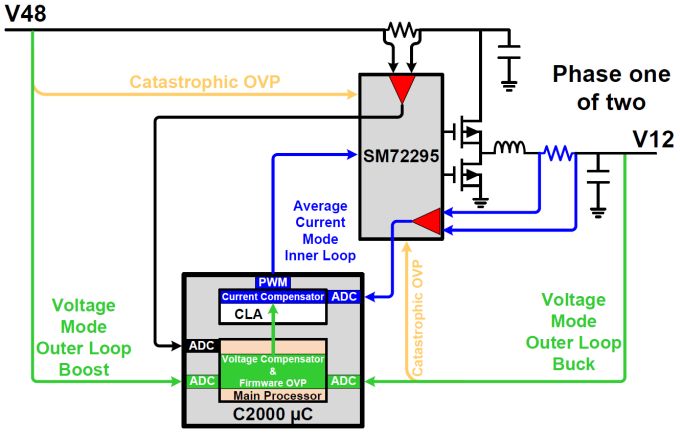
Figura 3: Diagramma semplificato del sistema (riferito alla sola prima fase)
Si noti come nel microcontrollore C2000 della serie Piccolo di TI siano stati evidenziati sia il Main Processor (che come vedremo implementa il loop esterno del controllore) che il CLA (che invece si occupa del loop interno del controllore). Il modulo CLA (acronimo di Control Law Accelerator) è un acceleratore matematico in virgola mobile a 32 bit che gira in parallelo e in modo completamente indipendente dal main processor. La CLA ha un suo proprio bus, set di registri, pipeline, e unità di elaborazione. Inoltre, la CLA può accedere direttamente ai registri delle periferiche del microcontrollore. Tutte queste caratteristiche la rendono ideale per implementare algoritmi ad elevata criticità temporale, quali:
- loop di controllo in tempo reale;
- algoritmi di filtraggio o algoritmi matematici in generale.
Come scelta progettuale si è deciso di utilizzare un componente SM72295 per l’implementazione di ogni fase, adottando uno schema a due fasi. Ciò da un lato permette di eseguire il rilevamento della corrente sia sul lato 48 V che sul lato 12 V, e dall’altro consente di parallelizzare il pilotaggio dei gate per ottenere una commutazione più veloce possibile. Sebbene il microcontrollore basato sul core F28069 abbia sufficienti risorse per gestire fino a 6 o addirittura 8 fasi, si è deciso di utilizzarne soltanto [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2959 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.


In generale penso che in tutti i design elettronici, l’ambiente automotive è molto critico: basta pensare alle sollecitazioni e temperature in gioco. Con la guida autonoma forse cambieranno i paradigmi di progettazione…??
Non sono molto esperto di elettronica di potenza ma mi chiedevo come mai la scelta dei Mosfet N invece dei classici BJT, più adatti per applicazioni di questo tipo.
Il Mosfet è il componente per eccellenza per i circuiti switching. Penso che il BJT venga considerato obsoleto. Penso….
Mea culpa, avevo letto frettolosamente fraintendendo le cose
I motivi sono principalmente dovuti alla dissipazione di potenza e alla velocità di commutazione: per queste applicazioni i transistor devono lavorare in modalità ON-OFF, modalità che si traduce nel MOS nelle zone di saturazione-interdizione, mentre nel BJT nelle zone di regione attiva-interdizione; la zona di regione attiva dei BJT presenta una pendenza più marcata rispetto alla regione di saturazione dei MOS, il che significa avere una resistenza tra collettore e emettitore maggiore rispetto a quella che si a nel MOS tra source e drain, con la conseguenza che durante la fase di ON il BJT dissipa più potenza rispetto al MOS. Oltre a questo fatto c’è da aggiungere che i MOS commutano più velocemente rispetto ai BJT perchè si basano su principi completamente diversi.
Il parametro chiave è l’RDSon che deve essere più bassa possibile per appunto dissipare di meno ed avere una maggiore efficienza.
Ovviamente la scelta del MOSFET deve essere fatta anche in considerazione della corrente e della tensione che deve sopportare.
L’ambiente operativo in cui deve funzionare un convertitore DC-DC bidirezionale per automotive non è certamente quello dei dispositivi fotovoltaici. Nei veicoli l’eletrronica è sottoposra a varie sollecitazioni, sia meccaniche che elettriche. L’egregio funzionamento del “riadattato” SM72295 andrebbe verificato nel tempo, inoltre sarebbe utile un confronto con prodotti di altri costruttori, magari già idonei al settore automotive.
Per vedere il futuro dell’automobile basta riguardarsi il film “Minority Report” ..!!
Tuttavia ci sono ancora molti ostacoli per arrivare a quel punto ..uno di questi è senz’altro l’ottimizzazione delle alimentazioni oltre che l’elevata mole di comunicazioni e dati che queste nuove auto devono gestire in tempo reale. Se ne vedranno delle belle e vale la pensa iniziare da questi argomenti.