
Inizia con questo articolo una lunga serie di puntate dedicate agli Aeromobili a Pilotaggio Remoto (APR). Si tratta, a tutti gli effetti, di un corso completo, pensato e dedicato, soprattutto, ai principianti ed ai neofiti. Semplici lezioni, esempi e tanto altro chiariranno perfettamente le idee ed illustreranno, in maniera estremamente semplice e chiara, i fondamenti della tecnologia, i principi di funzionamento, lo stato dell'arte e la storia di questi magnifici velivoli. Si consiglia vivamente di seguire cronologicamente le lezioni che seguiranno, senza fretta ed impazienza nel terminare subito il corso, ma con la consapevolezza di maturare i concetti presentati gradatamente nel tempo.
Introduzione
Negli ultimi decenni è molto cresciuto l'interesse nei confronti della progettazione e dello sviluppo di piccoli velivoli sprovvisti di pilota UAV (Unmanned Aerial Vehicle), più noti come droni, che in maniera autonoma possano effettuare missioni sia militari che civili, quali inseguimento (appunto) di obiettivi mobili e non, monitoraggio ambientale, del traffico e della sicurezza nelle città. Gli UAV sono sistemi integrati relativamente complessi, in grado di spostarsi in modo indipendente all'interno di un ambiente specifico, equipaggiati con una strumentazione di bordo per la navigazione e trasmissione dei dati e che, per questo, hanno suscitato interesse anche nell'ambito della ricerca scientifica, come abbiamo visto in un precedente articolo.
Stato dell'arte
La maggior parte delle applicazioni commerciali (alcune già citate in un precedente articolo) vedono gli UAV impiegati come dispositivi per lo streaming di dati e video ad una stazione centrale, comandi in remoto da un supervisore (una persona) che sceglie di volta in volta il prossimo compito da eseguire sulla base delle immagini che vengono raccolte dalla camera presente sul corpo del drone. La presenza della camera consente di estendere le scarse capacità sensoriali di quest velivoli, utilizzando concetti già noti nel campo della robotica industriale, rendendo possibile la raccolta di misurazioni passive dell'ambiente circostante. La visione artificiale consente così di creare un ciclo del tipo "guarda e poi muovi", un ciclo di comando dei movimenti del velivolo con retroazione visiva. In altri termini, utilizzando un ciclo chiuso di posizionamento, la camera fornisce tutte le informazioni necessarie all'aeromobile (vedi nota 1 a fine paragrafo) per l'attuazione della legge di controllo, formando un sistema che prende il nome di visual servoing (asservimento visivo). Ciò consente di sfruttare, nell'ambito più vario, noti nati per scopi commerciali, riducendo notevolmente i costi, rendendo così la tecnologia facilmente accessibile: tanti sono i modelli a disposizione, differenti per prestazioni e dimensioni. Tali caratteristiche li rendono estremamente personalizzabili, quindi facilmente adattabili in funzione della specifica applicazione di interesse.
Dal primo sistema di asservimento visivo, sviluppato nei primi anni '80, i progressi nel controllo visuale dei robot - si parla di robot, e non di UAV, perché quanto si sta affermando abbraccia una più ampia schiera di dispositivi - sono stati abbastanza lenti, ma negli ultimi anni grazie all'aumento della potenza computazionale della scala di integrazione, è stato possibile installare schede per l'elaborazione dati in real-time. Sistemi in grado di garantire che un elaborazione (o task) termini entro un dato vincolo temporale o scadenza (detta in gergo deadline). Il tempo per l'elaborazione deve essere minore di quello con cui giungono i campioni, dunque il sistema deve permanere in uno stato di hidle (attesa) per un tempo non nulla tra un campione ed il successivo.
Tanto sono i lavori presenti in letteratura che impiegano l'asservimento visivo per gli scopi più vari, ad esempio per il controllo di robot manipolatori, per la pianificazione di percorsi, etc. Caratteristica comune a tutte le pubblicazioni è l'utilizzo di paradigmi, quattro i più diffusi:
- dynamic look and move: la visione fornisce i punti nel quale il robot si deve portare, mentre il controllore aziona gli attuatori in modo da assumere la configurazione necessaria per il raggiungimento di tali punti;
- direct visual servo: il controllore è completamente eliminato poiché il sistema visivo controlla direttamente gli attuatori;
- position-based: le informazioni estratte dall'immagine (features, saranno approfondite nel corso dei successivi articoli) vengono utilizzate per ricostruire la posa (posizione/orientamento) 3D corrente dell'oggetto rispetto alla telecamera. Si genera un segnale di errore "cartesiano" dato dalla differenza tra la posa 3D desiderata e quella attuale.
- image-based: l'errore viene calcolato in 2D nel piano immagine, senza stimare la posizione degli oggetti esaminati. Il robot si muove in modo da portare le features 2D osservate verso i valori desiderati.
Per quanto concerne, invece, la telecamera si parla di sistemi:
- eye to hand: la camera è in grado di muoversi in completa autonomia rispetto alla posizione del robot, variando i suoi tre gradi di libertà (yaw, pitch e roll);
- eye in hand: la camera è fissata al corpo del robot, tramite il suo movimento si cerca di mantenere il bersaglio nell'area di visione.
Una variazione a questi modelli include il posizionamento di telecamera multiple, installate negli angoli di una stanza dunque per applicazioni indoor, in grado di fornire una visione stereoscopica dell'ambiente. Tali applicazioni, oltre ad avare un costo più elevato, presentano anche problemi di gestione ed elaborazione di doppie immagini. Nel corso di questi articoli ci si focalizzerà sul modello rappresentato (Figura 1) image based utilizzando la camera nella configurazione eye in hand.
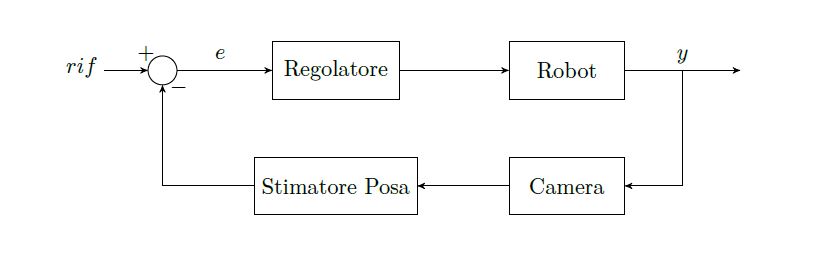
Figura 1: Esempio di un modello visual servoing
In sintesi, la vetrina di ricerca sull'inseguimento visivo di oggetti per UAV è molto varia, soprattutto in contesti suburbani. La progettazione di un sistema di navigazione per un robot volante, rispetto ad un equivalente a terra, è un obiettivo non da poco perché richiede un elevato numero di feedback per la stabilizzazione , e coinvolge sistemi fortemente non lineari.
La capacità di identificare ed inseguire autonomamente un oggetto arbitrario, oltre ad essere interessante già di per se, trova facile applicazione negli ambienti civili in particolare per tutto quello che è il contesto esplorativo. Ad esempio, nell'ispezione di edifici con pericoli di crollo o centrali nucleari dismesse, in contesti ambientali, e così via. La grande forza di questo sistema è la sua attuabilità anche in spazi non noti.
Nota 1: da non confondere con l'aeromodello, che a differenza del primo è impiegato per scopi hobbistici o sportivi: il volo avviene sotto il controllo visivo diretto e costante dell'aeromodellista).
Configurazioni più comuni
Si definisce rotorcraft, dall'unione di rotatory-wing aircraft, o aerogiro, un aeromobile ad ala rotante più pesante dell'aria che per volare utilizza la portanza generata da superfici alari dette pale in rotazione attorno ad un albero. Diverse pale montate su di un unico albero, in aeronautica, sono definite come un rotore (parte di questi concetti sono stati affrontati in un altro articolo).
Il modello tipico che rappresenta questa classe di velivoli è certamente l'elicottero che però, a causa delle sue caratteristiche, è utilizzato soltanto nella sua veste manned (vedi nota 2 a fine paragrafo).
Un multi-rotore (o multicopter) è un dispositivo in grado di volare, composto di una parte centrale, che contiene la maggior parte dell'elettronica, e più eliche a passo fisso: a differenza dell'elica a passo variabile, non è possibile agire sull'orientamento delle pale, ruotandole, perché ancorate al mozzo. Per ragioni prestazionali, le eliche sono tipicamente posizionate più lontano possibile dal corpo del velivolo, come si può vedere in Figura 2, mentre la maggior parte del peso è posizionato nel corpo (parte centrale). Inoltre, le eliche sono tutte orientate parallelamente alla forza di gravità in modo che l'aerea spazzata dalle pale sia perpendicolare, rispetto alla terra che funge da riferimento, alla forza di gravità.

Figura 2: Distribuzione tipica delle eliche di un multi-rotore.
In funzione del numero di rotori si parla di tricotteri, quadricotteri, esacotteri ed ottocotteri, che utilizzano rispettivamente un totale di tre, quattro, sei ed otto rotori. Le versioni più utilizzate prevedono un minimo di quattro rotori disposti in configurazione simmetrica a + o x come mostrato in Figura 3.
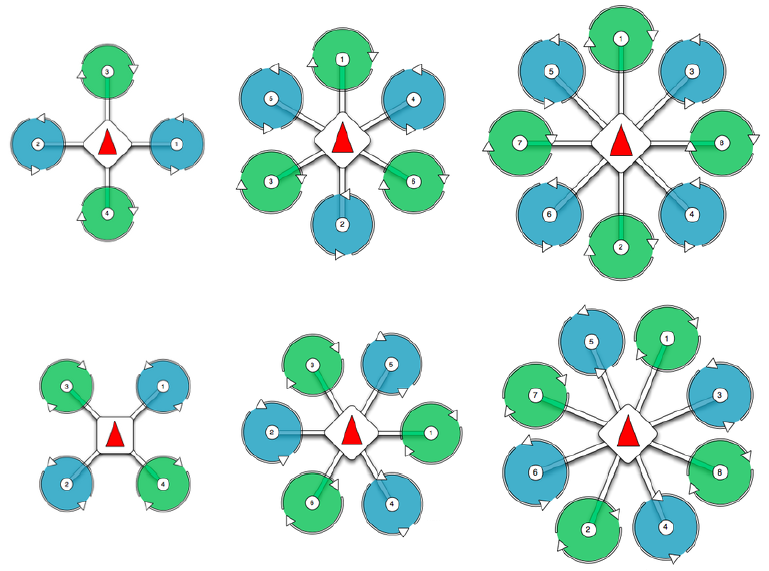
Figura 3: UAV a 4, 6, e 8 rotori in configurazioni + e x.
Altre configurazioni, ma non sono poi così comuni, si prestano al sollevamento di carichi da lavoro pesanti, e per le principali missioni con esigenti standard di sicurezza. In Figura 2 è riportato un ottocottero a configurazione a V, nel quale gli otto rotori sono equamente divisi in due braccia divergenti.
La differenza principale tra le diverse configurazioni è il carico di lavoro che esse sono in grado di sostenere: maggiore è il numero dei rotori, maggiore è anche il carico di lavoro. Inoltre, un alto numero di rotori assicura una maggiore affidabilità: la rottura di un rotore, o un suo malfunzionamento, non condiziona il proseguo della missione. Nel caso, poi, dei velivolo dotati di un doppio rotore coassiale, la diminuzione del rapporto peso/potenza consente, a parità di carico di lavoro, di avere una maggiore manovrabilità.
Nota 2: Lo svantaggio dell'elicottero tradizionale è rappresentato dalla complessità della sua meccanica difficilmente riproducibile in piccola scala con sufficiente precisione; i vincoli di peso e costo presenti nella realizzazione di un mini-UAV impongono, infatti, l'utilizzo di materiale plastico, meno resistente delle leghe metalliche e molto più sensibile alla presenza di giochi meccanici.
Principi di funzionamento
In questa sezione viene presentato in modo intuitivo il funzionamento basilare che regola il volo di un sistema multi-rotore (sia esso un tri-, quadri-, esa- o otto-rotore); questi concetti elementari non richiedono un'approfondita conoscenza dell'hardware o del modello fisico, ma danno un'appropriata comprensione su come funziona il velivolo.
[...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3437 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Corso di Elettronica per ragazzi – Puntata 3
Il punto sugli FPGA industriali

Tecnologie per la stampa 3D: Parte 1

Corso di Elettronica per ragazzi – Puntata 11
Misurazione dell’altezza di un suono mediante Arduino Nano 33 Sense

Ciao Giuseppe,
articolo molto interessante. Ho lavorato nel feature recognition (principalmente su solidi mediante modellatori o su mesh) e quindi la parte di estrazione di features dalla visione mi interessa molto.
Ho studiato nel passato OpenCV, principalmente usato su Raspberry. Non vedo in MAVLink dati di estrazione di features, quindi mi immagino ci siano altre librerie e meccanismi per estrarle. Sicuramente molto interessante. Grazie.
Non lo vedi perché non è questo l’impiego che ne è stato fatto. Nel corso dei prossimi articoli tutto ti sarà più chiaro.
Ti ringrazio, Giuseppe. A naso pero’ dubito che una board come ArduinoMega possa far girare librerie complesse come OpenCV. In ogni caso, ti seguirò cosi’ i miei dubbi saranno fugati. Ciao, grazie.
Ciao,
articolo molto interessante, io ho lavorato con Matlab e Simulink sulla simulazione del pilota automatico bidimensionale, ossia quello a bordo delle navi. Che tu sappia, esistono modelli matematici semplificati sui droni? Sarebbero utili per realizzare un simulatore di volo e per il tuning del PID di ArduPilot. Grazie
Certo che esistono!! La letteratura ne è piena. Consulta banche dati come Scopus o Web of Science, troverai tutto quello che ti occorre.