
Introduzione
La piattaforma F1/10 rappresenta un riferimento essenziale per la ricerca e lo sviluppo nel campo della guida autonoma, grazie ad un design che trae ispirazione dal mondo delle corse di Formula 1. Il sistema, concepito in scala 1:10, consente a studenti e ricercatori di accedere alle tecnologie di autonomia veicolare, garantendo un’esperienza completa e altamente flessibile grazie alla modularità del progetto e alla compatibilità con il sistema operativo ROS. Le competizioni di guida autonoma, in continua evoluzione, costituiscono un terreno di prova ideale per lo sviluppo di tecnologie avanzate in settori come l’Intelligenza Artificiale, la robotica e i sistemi cibernetici. Tali sfide richiedono algoritmi ottimizzati per percezione, pianificazione e controllo, capaci di sfruttare al massimo le risorse computazionali e le tecniche di simulazione. La navigazione ad alta velocità, l’evitamento dinamico degli ostacoli e la gestione delle interazioni multi-agente sono solo alcune delle applicazioni di queste tecnologie, che trovano impieghi diretti anche in contesti reali come il traffico urbano e il trasporto autonomo.
La rilevanza della ricerca in questo ambito emerge nella capacità di accelerare l’adozione della guida autonoma e di migliorare sicurezza ed efficienza nei veicoli. Le simulazioni in ambienti controllati e le competizioni rappresentano un’opportunità unica per testare algoritmi in condizioni estreme, riducendo i rischi associati alle prove sul campo. L'articolo si concentra sul simulatore F1TENTH.dev (https://github.com/f1tenth-dev/simulator), uno strumento open-source progettato per replicare fedelmente le prestazioni e il comportamento della piattaforma fisica F1/10. L’articolo approfondisce le caratteristiche principali, l’architettura e il contributo che il simulatore offre sia alla ricerca che all’insegnamento nel campo della guida autonoma, mettendo in luce il suo potenziale come risorsa chiave per progetti avanzati e studi specialistici.
Architettura del simulatore F1/10
Il simulatore F1/10 è stato concepito con un'architettura modulare che assicura un elevato grado di flessibilità e adattabilità, rispondendo alle necessità di una vasta gamma di utenti, dai ricercatori agli studenti. Esso consente di integrare o escludere facilmente componenti specifici, rendendo il sistema estremamente personalizzabile per esperimenti o applicazioni diverse. L'architettura è organizzata in tre componenti principali: il front-end, il blocco funzionale e il back-end, ognuno dei quali riveste un ruolo fondamentale nel funzionamento complessivo del simulatore.
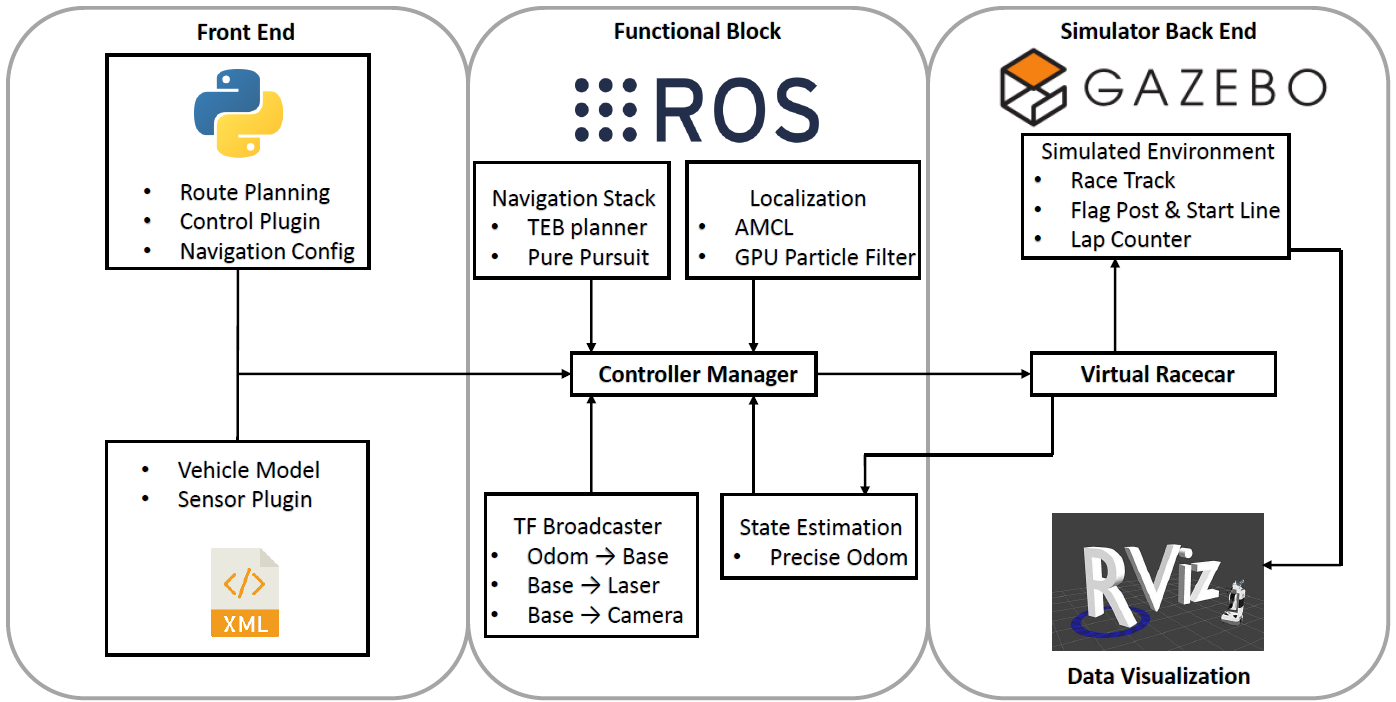
Figura 1: Architettura F1/10
In Figura 1 è riportata l'architettura del F1/10, che comprende (a sinistra) il front-end, che include l'API Python di ROS, parametri algoritmici di alto livello, il comportamento desiderato per la gara e un plugin di controllo (con un multiplexer di comandi per dare priorità agli stack di navigazione desiderati), oltre alla descrizione del veicolo. Al centro si trova il blocco funzionale basato su ROS, dotato di meccanismi di feed-forward e feed-back, con il controller manager che fornisce servizi di sincronizzazione. Infine, a destra, è presente il back-end del simulatore, composto da Gazebo, l'ambiente di gara, i servizi di telemetria e gli strumenti di visualizzazione.
Il front-end è costituito da un'API Python ottimizzata per ROS, che facilita l'interazione con il veicolo virtuale. L'API consente agli utenti di pubblicare comandi di attuazione, come quelli per il controllo della velocità e dello sterzo, e di accedere in modo semplice ai dati sensoriali generati dal simulatore. Un elemento chiave del front-end è la descrizione del veicolo, gestita attraverso file Xacro (XML Macros), che permettono di definire in modo dettagliato sia le caratteristiche fisiche, come la forma e le dimensioni, sia quelle funzionali, come i sensori (ad esempio LiDAR, telecamere RGB e IMU) e gli attuatori. La modularità di questi file consente di abilitare o disabilitare specifici componenti a seconda delle esigenze del progetto.
Il blocco funzionale rappresenta il cuore operativo del simulatore, ospitando i nodi ROS principali responsabili della navigazione e del controllo. Tra questi, il controller manager svolge un ruolo importante, garantendo la sincronizzazione in tempo reale tra i loop di controllo degli attuatori e i sensori. La sincronizzazione è essenziale per ottenere prestazioni realistiche e affidabili, permettendo agli utenti di testare algoritmi complessi senza incorrere in problemi di latenza o disallineamento dei dati. All'interno del blocco funzionale trovano posto anche i nodi per la gestione della localizzazione e della pianificazione del percorso, rendendo questa sezione una parte fondamentale per la simulazione di scenari dinamici e competitivi.
Il back-end si basa sul simulatore Gazebo, scelto per la sua capacità di replicare con precisione la fisica del veicolo e le interazioni con l'ambiente circostante. Ciò consente di ottenere una piattaforma altamente realistica per testare algoritmi di guida autonoma in ambienti che includono tracciati complessi e ostacoli dinamici. Il back-end integra, inoltre, strumenti avanzati per la telemetria, che consentono di raccogliere e analizzare metriche di gara come tempi sul giro, traiettorie seguite e velocità medie. I dati forniscono un feedback dettagliato e immediato sulle prestazioni degli algoritmi, rendendo il simulatore un potente strumento per ottimizzare il comportamento del veicolo virtuale.
Infine, il sistema include funzionalità di visualizzazione avanzata, come la rappresentazione in tempo reale delle traiettorie e dei dati sensoriali attraverso RViz. La visualizzazione facilita l'interpretazione dei risultati e supporta gli utenti nell'ottimizzazione dei propri algoritmi, completando un ecosistema che combina efficienza, precisione e adattabilità. L'architettura modulare del simulatore F1/10 si distingue quindi come una soluzione versatile e altamente efficace per la ricerca e l'insegnamento nel campo della guida autonoma.
Caratteristiche del simulatore
Il simulatore F1TENTH.dev si distingue per una gamma di funzionalità che ne fanno uno strumento estremamente versatile e avanzato. Una delle sue principali caratteristiche è rappresentata dai componenti di sensing e attuazione, che includono un'ampia varietà di sensori virtuali. Tra questi si annoverano scanner LiDAR 2D, telecamere RGB-D e unità di misura inerziali (IMU), sensori che producono dati altamente realistici, fondamentali per lo sviluppo e il test di algoritmi di percezione, localizzazione e navigazione autonoma. La qualità dei dati forniti consente di simulare scenari complessi e sfidanti, e ricreare condizioni operative simili a quelle reali.
La telemetria integrata è essenziale per il monitoraggio delle prestazioni: attraverso un'analisi dettagliata di metriche fondamentali, come il tempo sul giro, la velocità media e le traiettorie percorse, il sistema offre informazioni utili per ottimizzare le strategie di guida e migliorare gli algoritmi. I dati, visualizzabili in tempo reale e analizzabili post-gara, permettono una valutazione approfondita e supportano un ciclo di sviluppo più rapido ed efficace.
La gestione di configurazioni multi-veicolo rappresenta un ulteriore punto di forza del simulatore. È possibile simulare fino a 16 veicoli virtuali contemporaneamente, ciascuno dotato di uno spazio di nome ROS indipendente, una separazione che elimina conflitti tra risorse condivise, come sensori e attuatori, e che garantisce un ambiente simulativo fluido e scalabile. La capacità di gestire più veicoli in parallelo consente di studiare scenari complessi di interazione multi-agente, incluse situazioni di sorpasso, cooperazione e competizione. Tali funzionalità sono particolarmente rilevanti per la ricerca su strategie avanzate di navigazione e controllo in contesti dinamici.
Grazie alla combinazione di precisione nella simulazione, telemetria avanzata e supporto multi-veicolo, F1TENTH.dev rappresenta una piattaforma indispensabile per chiunque desideri esplorare soluzioni innovative nel campo della guida autonoma, testare algoritmi in sicurezza e accelerare il trasferimento di risultati dal simulatore al mondo reale. In Figura 2, in senso orario dall'angolo in alto a sinistra, viene mostrata la vettura reale F1/10; la versione virtuale della F1/10 visualizzata nell'interfaccia di Gazebo; il set modulare di sensori con LiDAR 2D e telecamera stereo; il sistema di trasmissione virtuale a quattro ruote.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2658 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.




