
Come usare un filtro LC a due stadi per ridurre il rumore di un regolatore switching.
Nella maggiore parte delle applicazioni gli alimentatori switching trovano oggi largo impiego. Tra i vantaggi principali di questo tipo di regolatori di tensione vi sono sicuramente l’elevata efficienza - che comporta una riduzione della potenza dissipata - e le ridotte dimensioni. Il principio di funzionamento di un alimentatore switching è legato ai processi di carica e scarica di elementi di memoria come condensatori ed induttori; il circuito, assorbendo dalla linea di ingresso, accumula in queste celle energia che il carico tende poi a dissipare. Poiché condensatori ed induttori dissipano soltanto durante le fasi di commutazione, è immediato concludere che l’efficienza del regolatore è teoricamente prossima al 100%. Tuttavia, proprio questo funzionamento switching che assicura le caratteristiche indicate comporta che la tensione di uscita è in realtà affetta da un ripple che in talune applicazioni (ad esempio, in ambito audio/video) può essere troppo elevato; il problema appare sempre più evidente con la continua riduzione delle tensioni di lavoro dei dispositivi a semiconduttore. Nei regolatori più semplici, inoltre, il rumore sull’uscita può accoppiarsi sulla tensione di ingresso causando distorsioni armoniche sulla linea di alimentazione. Nell’impiego di alimentatori switching è fondamentale pertanto progettare correttamente un adeguato filtro di uscita. In questo articolo discuteremo in particolare l’idea di base di un filtro a due stadi; prima di ciò, però, è opportuno vedere in dettaglio maggiore il principio di funzionamento di un alimentatore switching presentando una delle prime topologie di circuiti realizzate, quella dei convertitori buck.
Convertitori switching con topologia buck
La figura 1 mostra lo schema di principio di un convertitore buck.

Figura 1: schema di un convertitore buck.
La tensione di ingresso, come si vede, è commutata mediante un transistor; quando questo è on la tensione sul partitore di tensione R1/R2 cresce linearmente. La differenza tra questa ed una tensione di riferimento Vref viene amplificata e confrontata mediante comparatore con una seconda tensione V+ che ha un andamento a dente di sega. L’uscita del comparatore viene quindi riportata in ingresso ad un amplificatore di corrente usato per generare un controllo PWM del transistor. Quando l’errore è maggiore del valore della tensione a dente di sega, il transistor viene spento. In queste condizioni, il condensatore eroga l’energia richiesta dal carico e la tensione di uscita decresce. In condizioni nominali, il valore medio della tensione di uscita è quindi
dove, con ovvia notazione, Vo è la tensione di uscita, Vdc quella di ingresso, Ton il tempo di on dello switch e T il periodo di switching. Il convertitore buck adotta, in definitiva, un loop di controllo con feedback negativo. Infatti, se la tensione di uscita (e quindi del partitore) cresce leggermente, l’errore si riduce e quindi la tensione a dente di soglia raggiunge prima tale valore; ne consegue che il comparatore commuta prima determinando una riduzione del tempo di on Al contrario, se la tensione di uscita si riduce, il tempo in cui il transistor è acceso è maggiore. Come accennato in precedenza, il vantaggio principale dei regolatori switching è la maggiore efficienza. Nel caso della topologia buck appena presentata, ad esempio, si può dimostrare che tale efficienza, avendo incluso le perdite in AC e DC del circuito, è data dalla formula:
dove α è un parametro che vale 1/3 nelle condizioni migliori e 2 in quelle peggiori. Nel caso, ad esempio, di un convertitore con frequenza di switching 50 Hz, tensione di ingresso 48V e tensione di uscita 5V, con tempo di on di 0,3ms l’efficienza varia tra il 67% e l’83% circa. Con un regolatore lineare si sarebbe ottenuta un’efficienza di solo il 10,4%!
Filtro LC in uscita
In base a quanto appena discusso, un condensatore switching è caratterizzato quindi da un filtro di uscita di tipo LC. Nella maggior parte delle applicazioni il condensatore C1 può facilmente essere dimensionato, in prima istanza, a partire dalla specifica sul ripple della tensione di uscita. Infatti, tale parametro rappresenta la variazione di tensione che si osserva ai capi del condensatore durante il periodo di on del circuito switching. Deve quindi valere la relazione
dove ΔI è la corrente di carica, ΔVo la tensione di ripple. Richiedendo un ripple di 0.5 V, con un tempo di on di 10 ms ed una corrente di 6 A, si ottiene un valore minimo di capacità di 120mF. Nelle applicazioni in cui la corrente di carico varia rapidamente, però, si deve tener conto anche della stabilità della tensione di uscita. Il caso peggiore è rappresentato da una repentina commutazione della corrente assorbita, nel caso in cui questa vari dal valore massimo a zero. In questo caso l’energia 0.5LI2 assorbita dall’induttore si scarica attraverso il condensatore determinando un overshoot della tensione di uscita. Se indichiamo con Vp la tensione massima e Vo la tensione nominale sussiste la relazione seguente
Imponendo un requisito sulla stabilità di regolazione del circuito, ne deriva un valore minimo per la capacità del condensatore. Considerando, ad esempio, il caso di una tensione di uscita nominale di 5V ed un overshoot inferiore di 1V, con un’induttanza di 19.4 mH ed una corrente di carico massima di 20 A, si ottiene un valore minimo di capacità di 709 mF, maggiore di quello calcolato in precedenza.
Filtro a due stadi
Il filtro LC della figura 1 ha idealmente una caratteristica di tipo passa-basso. Nella realtà si devono considerare, alle elevate frequenze, i parametri parassiti di induttanza e capacità che finiscono per diventare dominanti; a tali frequenze elevate, per questo, il filtro è in genere trasparente. In particolare si può dimostrare che se la costante di tempo data dal prodotto della capacità e della resistenza serie parassita del condensatore è maggiore della metà del tempo di on del transistor allora il valore del ripple di uscita è dominato proprio dalla componente indotta dalla resistenza parassita. Per compensare tali problemi, ed evitare nel contempo di impiegare costosi componenti a basso ESR, si usa talvolta una diversa configurazione a due stadi del tipo mostrato in figura 2; in pratica il condensatore di filtro viene sostituito da due condensatori in parallelo separati da un’induttanza.
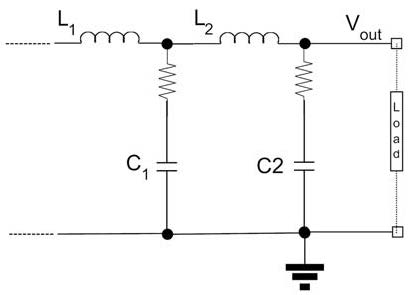
Figura 2: fltro LC a due stadi per regolatori switching
Tale soluzione è particolarmente utile nel caso in cui non si abbia troppo spazio a disposizione sul circuito stampato per soluzioni di filtraggio più complesse. Cerchiamo di capire, qualitativamente, come funziona questo circuito. La sua funzione caratteristica è del tipo:

Oltre alla frequenza di taglio a bassa frequenza, come si può vedere, compare quindi anche un polo alle alte frequenze dovuto al secondo stadio LC. Per calcolare approssimativamente i due poli si può ragionare in questo modo. L’induttanza L2 viene scelta di valore inferiore ad L1, tipicamente pari al 10% di questo. Così, alle basse frequenze, si può considerare L1 come un corto circuito, per cui il filtro risulta equivalente allo schema della figura 3a. Da qui si vede che la frequenza di taglio a bassa frequenza è data, in buona approssimazione, da:
dove Cp=C1+C2 è il parallelo delle capacità C1 e C2. Il loop di controllo del circuito deve essere chiuso su questo valore per assicurare la stabilità del circuito. Alle alte frequenze, invece, possiamo considerare l’induttanza L1 come un circuito aperto; il filtro, allora, si riduce allo schema equivalente della figura 3b.
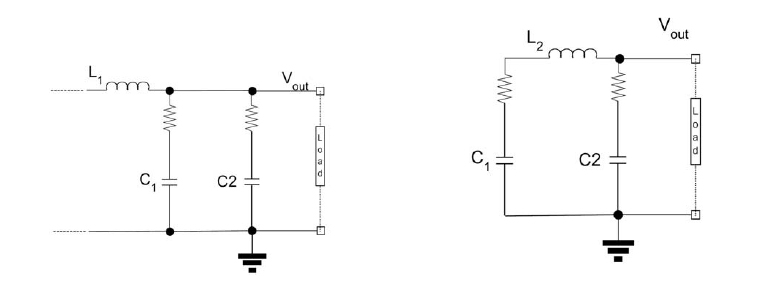
Figura 3: schema equivalente di un filtro LC a due stadi a bassa (a) ed alta (b) frequenza.
In questo caso la frequenza di risonanza è data da:
dove
è la serie delle capacità C1 e C2. Se il valore di C2 si è scelto molto maggiore di C1- ad esempio, di un ordine di grandezza, ma in molti casi è sufficiente anche un fattore fino a 20 - si osserva che la frequenza di taglio dipende solo dal condensatore del primo stadio e, soprattutto, non è affatto influenzata dalla capacità del carico. Non vi è quindi il rischio che tale secondo polo induca instabilità nel circuito. In ogni caso, una buona regola può essere quella di dimensionare il circuito in modo che la seconda frequenza di risonanza wh sia almeno 3 volte maggiore della frequenza di crossover del loop di controllo.


Intanto grazie dell’articolo, per costruire un filtro per un alimentatore rumoroso come indicato in figura 2 quali valori di induttanza sono appropriati per l1 e L2?
Grazie