
Il notevole incremento delle applicazioni elettroniche in ambito automotive ha imposto un sempre maggiore dettaglio tecnico nella realizzazione di nuovi apparati di rete nell’autoveicolo, questo ha portato ad un’evoluzione del networking in questo campo.
I sistemi embedded operano generalmente come un sistema di controllo a ciclo chiuso: non fanno altro che campionare i sensori, calcolare la risposta appropriata di controllo, ed inviare queste risposte agli attuatori, i bus automotive in relazione all’applicazione devono rendere possibili tempi di comunicazione e meccanismi di controllo che soddisfino i requisiti dell’applicazione a cui sono destinati. Ma, prima di arrivare ad aspetti particolari di prestazioni, tempi di risposta, concetti di design fault tolerant, è necessario operare una canonica generalizzazione e partire dal principio attraverso una serie di classificazioni utili allo scopo che ci siamo posti: un discorso chiaro e per quanto possibile riassuntivo sui bus automotive tuttora in utilizzo. Le architetture che considereremo sono genericamente chiamate ‘bus’, poiché le comunicazioni in broadcast o multicast sono supportate come servizi base della comunicazione e la loro implementazione è proprio basata su bus logici o fisici. In una generica architettura a bus gli applicativi girano su computer host connessi alla rete e i sensori e gli attuatori sono connessi agli host. Le interfacce e la connessione stessa compongono il bus; la combinazione di host e interfacce viene indicata come nodo. La realizzazione della connessione tra nodi segue di solito due schemi riportati in figura, la prima soluzione prevede un bus fisico passivo (figura 2), mentre la seconda è caratterizzata da un hub centralizzato attivo (figura 1).
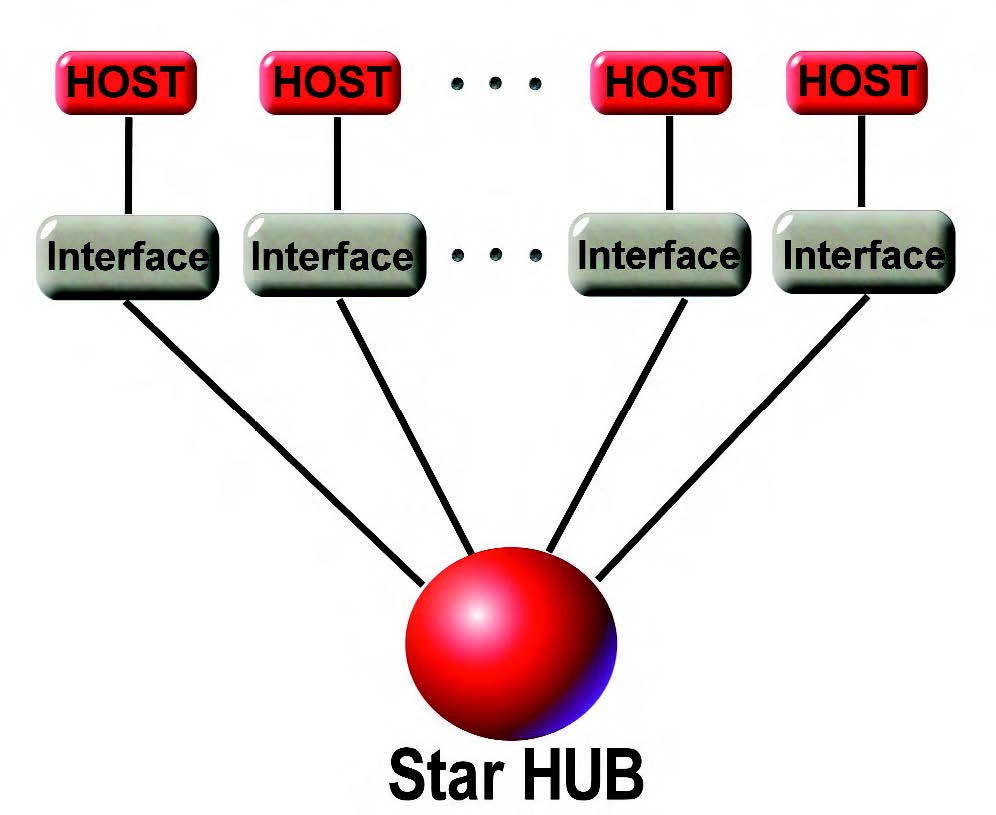
Figura 1: connessione con hub centrale.
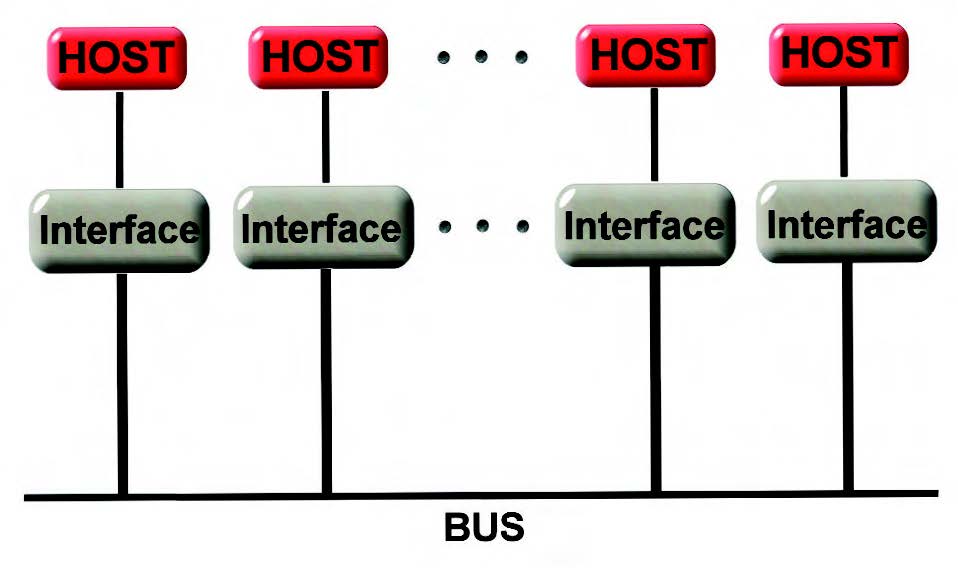
Figura 2: bus passivo
Le interfacce possono essere vicino all’host oppure possono formare una struttura complessa nell’hub centrale, naturalmente è possibile che molti componenti siano replicati per la fault-tolerance, nel caso in cui il bus sia destinato ad applicazioni safety-related o safety-critical. I sistemi di comunicazione più comuni nel settore automotive sono basati su transricevitori a basso costo, comuni tecnologie wired, un ragionevole rapporto tra dato e lunghezza dei frames trasmessi e infine l’uso nella maggior parte dei casi di uno schema di accesso al bus guidato dagli eventi (event-triggered). I rappresentanti più comuni di tale approccio alla comunicazione sono protocolli come CAN, VAN, A-BUS, ecc. Il tentativo che porteremo avanti nella nostra trattazione è quello di spiegare in breve i tratti caratteristici dei diversi bus sottolineando l’applicazione a cui sono destinati ed, in relazione allo stack protocollare ISO/OSI, quali dei livelli sono standardizzati dai vari bus. Proprio per rendere maggiormente fruibili le diverse considerazioni che andremo di qui a breve a riportare, vengono riprese alcune brevi note relative al mondo dei sistemi distribuiti e al modello ISO/OSI.
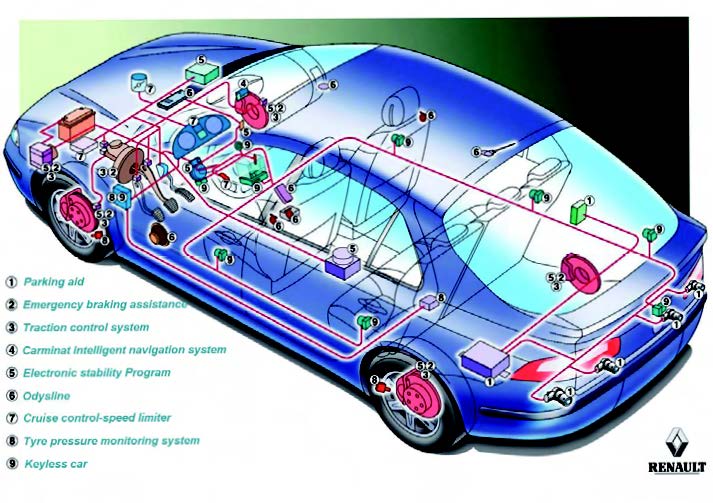
Figura 3: reti in ambito automotive
Principi di progettazione per Sistemi Distribuiti ed il modello ISO/OSI
In una qualsiasi rete di comunicazione occorre rispondere a esigenze molto particolari dettate dalle applicazioni da supportare, si può tentare di rispondere a tali esigenze cercando di capire dove e in che modo collocare intelligenza nell’ambito della rete in considerazione. Nell’interno di ognuno dei due terminali che realizzano una semplice comunicazione abbiamo la necessità di portare avanti una serie di differenziazioni tra le funzioni da espletare per la comunicazione, la prima di queste è quella tra funzioni proprie di un calcolatore e funzioni specializzate per la comunicazione, ma esistono tanti altri diversi piani su cui operare differenziazioni, pertanto questa semplice suddivisione non è sufficiente. Per esempio, in un sottosistema di comunicazione ci sono varie funzioni come l’indirizzamento, la gestione degli errori, ecc. la necessità di fare suddivisioni è dovuta alla volontà di far comunicare elementi eterogenei tra loro, basti pensare a calcolatori di diversi costruttori con diversi sistemi operativi. L’interoperabilità è un concetto fondamentale per le reti, e grazie a questa interoperabilità che si ottengono gli stessi risultati (o quasi) andando ad interagire con un webserver attraverso browser differenti o utilizzando diversi client per la posta elettronica con gli stessi effetti. Le applicazioni possono interoperare solo se tutto quello che troviamo ‘al di sotto’, che realizza la comunicazione, è capace di interoperare. Nelle prime reti a commutazione di circuito intrecciando i fili, fatto salvo che tutti rispettassero il brevetto di Bell, era possibile comunicare. Man mano che si sono introdotte complicazioni nelle reti a commutazione di circuito il problema dell’interoperabilità è diventato più consistente. Ad esempio, per rendere interoperabili due reti che utilizzano un meccanismo di creazione della connessione differente, i costruttori di centrali hanno dovuto concordare un modo per rendere compatibile la creazione della connessione, nasce quindi il concetto di standard e cioè la definizione di regole a cui bisogna attenersi per avere compatibilità tra i vari sistemi di comunicazione. Possiamo quindi parlare di una modellazione della comunicazione in una struttura a livelli, definendo le regole generali di interazione tra livelli e tra entità nell’ambito di una stessa rete. A questo punto ci potremmo chiedere: perché si sceglie una struttura a livelli e non un blocco unico in cui vengono identificate le funzionalità? Si fa questo perchè, come sempre accade nell’ingegneria dei sistemi complessi, si cerca di suddividere tali sistemi in blocchi semplici, in più la suddivisione a livelli funzionali risulta un ottimo strumento per condividere con altre persone progetti di grande complessità. Il modello “de iure” nell’ambito delle reti è quello ISO/OSI, introdotto dell’International Standard Organization (ISO) ente di standardizzazione internazionale, è un modello per l’Open System Interconnection (OSI) cioè per l’interconnessione aperta tra sistemi. L’obiettivo di tale standardizzazione è definire un modo per descrivere opportunamente i sistemi di comunicazione, facendo in modo che nel descriverli in maniera standard, questi sistemi prodotti da aziende diverse potessero essere in grado di comunicare tra loro. Esso prevede 7 livelli come evidenziato in figura. Prima di chiarire l’importanza di ogni singolo livello bisogna chiarire due importanti questioni:
■ 1- come tali livelli interagiscono all’interno di tali entità;
■ 2- come tali entità interagiscono tra loro stesse.
Al primo quesito si può rispondere dicendo che in un modello puramente funzionale l’interazione è libera e non c’è organizzazione gerarchica, mentre qui si introduce la regola dell’adiacenza secondo la quale ogni livello può interagire solo con i livelli adiacenti. Interagire significa chiedere al livello inferiore di sviluppare un servizio o acquisire la richiesta di sviluppare un servizio dal livello superiore. Al secondo quesito possiamo invece rispondere ipotizzando di avere a disposizione due entità protocollari identiche nell’ambito della stessa rete, poniamo di creare la comunicazione tra le due entità, i due terminali sono collegati attraverso un mezzo fisico e l’interazione potrà avvenire solo tra livelli omologhi (peer layer). Ogni livello di una entità può comunicare solo con il livello omologo dell’altra entità. Il motivo per cui si lavora con tale regola è sicuramente la necessità di ordine, ma c’è anche un motivo logico, se ogni livello ha delle funzionalità non ha senso far parlare in remoto livelli che sviluppano funzioni diverse. Bisogna sottolineare che la comunicazione tra livelli omologhi in ogni caso avviene a livello logico e non fisico in quanto per la regola dell’adiacenza ogni informazione passa attraverso tutti i livelli sottostanti in entrambe le entità per arrivare, quindi, al livello fisico dove avviene l’unica comunicazione di tipo orizzontale. Definiamo in breve i vantaggi e gli svantaggi della realizzazione a livelli secondo il modello ISO/OSI. Sicuramente se pensiamo ai livelli il primo vantaggio è l’interoperabilità esterna tra entità della rete, ma a questo si può facilmente aggiungere l’interoperabilità interna, considerando la standardizzazione delle interfacce tra livelli, con la possibilità di sostituire un livello con un altro omologo in modo trasparente, questo è un aspetto importante valutato anche in automotive. Un altro vantaggio è l’astrazione con cui si realizzano le diverse funzionalità nell’ambito del singolo livello, tale aspetto si trasforma in uno svantaggio ai livelli più alti come il livello trasporto, dove il canale di comunicazione è visto come insicuro e poco affidabile per quanto riguarda perdita e duplicazione dei pacchetti, insomma si perde contatto con quanto succede al di sotto e non si realizza la particolare situazione della rete.
Layer 1- Livello Fisico: si occupa di trasmettere sequenze binarie sul canale di comunicazione. A questo livello sono specificate da un punto di vista convenzionale, le tensioni relative ai livelli logici 0 e 1, tipi, dimensioni, impedenze dei cavi, tipi di connettori. Il livello fisico è nel dominio dell’ingegneria elettronica;
Layer 2- Livello Data Link: ha come scopo la trasmissione affidabile di frame (pacchetto dati di livello 2), verifica la presenza di errori attraverso l’aggiunta di una sequenza di controllo detta FCS (Frame Control Sequence). Può gestire meccanismi di correzione di errori tramite ritrasmissione;
Layer 3- Livello Rete: questo livello definisce l’instradamento dei messaggi (pacchetti). Determina quali sistemi intermedi devono essere attraversati da un messaggio per giungere a destinazione. Quindi vengono gestite tabelle di instradamento per ottimizzare il traffico sulla rete;
Layer 4- Livello Trasporto: è il primo livello non implementato nei nodi intermedi della rete, fornisce servizi per il trasferimento dei dati end-to-end, cioè indipendenti dalla rete sottostante. In particolare il livello 4 può: frammentare le informazioni da inviare per raggiungere dimensioni idonee al livello 3, rilevare e correggere gli errori, controllare il flusso, controllare le congestioni;
Layer 5- Livello Sessione: è responsabile dell’organizzazione del dialogo e della sincronizzazione tra due programmi applicativi e del conseguente scambio di dati;
Layer 6- Livello Presentazione: gestisce la sintassi dell’informazione da trasferire, e garantisce la portabilità dei dati, in quanto si adopera a trasformare le grandezze secondo il formato di rappresentazione della rete, per poi garantire a destinazione l’operazione duale di traduzione nei formati di rappresentazione caratteristici della macchina destinataria.
Layer 7- Livello Applicazione: è il livello in cui sono definiti i protocolli su cui sono costruite le principali applicazioni, come http per i web browser o SMTP e POP3 per i programmi di posta elettronica ecc... Ognuno di questi livelli aggiunge un header al dato da trasmettere, mentre l’unico livello che aggiunge sia in testa che in coda (trailer) è il livello Data Link, dove aggiungiamo in coda la Frame Control Sequence. Non tutti i livelli dello stack ISO/OSI sono implementati nella realtà di un qualsiasi protocollo di rete, nei bus automotive sono realizzati solo alcuni dei meccanismi definiti nei prossimi paragrafi. Di qui in poi si andranno a dettagliare i diversi protocolli automotive cercando di sottolineare gli aspetti storici che ne hanno motivato la nascita, gli aspetti operativi d’impiego nelle vetture di produzione e gli aspetti tecnologici caratteristici.
Automotive Bus
MOST bus
MOST è un acronimo che sta per Media Oriented Systems Transport, definisce una rete punto-punto basata su fibre ottiche (Plastic optical fibers) a basso overhead e basso costo secondo una topologia ad anello, stella o a cascata. Le specifiche del bus Most definiscono dello stack ISO/OSI solo livello fisico, livello MAC, livello Rete e livello Applicazioni. Il bus MOST è una tipica soluzione per le applicazioni di entertainment in automotive come Video, DVD, CD ecc.
J1850 bus
Il bus SAE J1850 è usato per la diagnostica e la condivisione d’informazioni tra applicazioni automotive in veicoli on e off road. I livelli fisici supportati da tale protocollo sono due: il primo prevede 41.6Kbps PWM su due fili e il secondo, 10.4Kbps VPW su singolo filo. La configurazione con singolo filo supporta massima lunghezza del bus di 35mt con 32 nodi. L’interfaccia J1850 è stata sviluppata nel 1994, ed è principalmente un protocollo di classe B nella classificazione prima riportata. A livello data link viene utilizzato il metodo di arbitraggio nelle contese per l’accesso al bus CSMA/CR.
MI Bus
Il Motorola Interconnect bus è un protocollo di comunicazione seriale basato su di un solo filo con un master e molti slaves. Il MI bus è impiegato per la comunicazione con gli stadi di pilotaggio dei sedili, degli alza-cristalli elettrici ecc. Il master invia un pacchetto (‘push field’) con indirizzo e dati a tutti gli slaves sul bus. Il singolo slave con lo stesso indirizzo risponde con l’informazione richiesta (‘pull field’). Tutto questo attraverso due pacchetti di riferimento il ‘Push Field’ che contiene un bit di start, un bit di sincronizzazione, un campo dati e un campo indirizzi e il ‘Pull Field’ che contiene un bit di sincronizzazione, un campo dati e un campo ‘end of frame’. Il singolo filo opera tra logica 0 (0.3V massimi) e logica 1 (+5V).
DSI Bus
Distributed System Interface [DSI] è stato sviluppato da Motorola come bus dedicato alla safety. Il DSI è una Niche Area Network (NAN) progettata per interconnettere ad un modulo centrale di controllo i diversi sensori ed attuatori. A livello fisico abbiamo un bus a due fili seriali che collegano sensori strettamente correlati alla safety e componenti del veicolo come l’interfaccia elettronica degli airbags. Tale bus prevede uno schema implementativo con un voltaggio a 3 livelli in una comunicazione master/slave. Il data rate è più di 4Kbps e il numero di bit di CRC è 4.
BST Bus
Un altro bus omogeneo al precedente DSI è il BST Bus [Bosch-Siemens-Temic], anche questo protocollo è nato per il controllo dei componenti di un veicolo strettamente correlate alla safety, come gli air-bags. Il livello fisico è un bus a due fili che utilizza codifica Manchester, bit di parità o codice CRC per rilevare e correggere gli errori. Il data rate del BST bus è circa 250Kbps.
MML Bus
Nato nel 1999 in un’unica versione come “Personal Productivity Vehicle” per l’auto SAAB 9-5 è stato sviluppato dalla Delphi Delco Electronics System’s Mecel AB per conto della Delphi Automotive Systems e della SAAB. Questo bus (Mobile Multimedia Link) è nato per i contenuti di entertainment del veicolo. La tecnologia impiegata per il livello fisico prevede fibra ottica in una topologia a stella con un approccio alla comunicazione master/slave. Il bit rate è di 100Mbit/sec con una configurazione di massima lunghezza dei cavi di 10 metri. La codifica implementata è NRZ. Il bus è fault tolerant e supporta il plug and play. In particolare è dedicato al campo multimediale automobilistico, come ad esempio: antenna televisiva e radio, l’hud (head-up display), lettore DVD, lettore CD, stereo audio digitale e amplificatori digitali. É stato utilizzato perchè permette capacità di sintesi vocale per comunicare informazioni testuali, permettendo al conducente di tenere le mani sul volante e gli occhi sulla strada, come ad esempio: informazioni stradali tramite GPS, informazioni sulla condizione del traffico, del meteo, dei ristoranti e degli hotel, o per il semplice cambio di selezione musicale dello stereo.
Byteflight (SI-Bus)
Questo protocollo è sotto copyright della BMW 1995-2000, è stato sviluppato da BMW AG, Motorola, ELMOS, Infineon, Siemens, Steinbeis e IXXAT. Combina i vantaggi dei protocolli sincroni e asincroni, garantisce l’integrità dei dati ad una velocità di trasmissione dati di 10 Mbps (2-wires o 3-wires) a un aggiornamento ogni 250 µs. Prevede un accesso al bus libero da collisione con il TDMA (Time Division Multiple Access). Il messaggio viene indirizzato attraverso identificatore secondo una comunicazione orientata al messaggio. La latenza è garantita per un certo numero di messaggi in alta priorità. È stato pensato per l’alta flessibilità ed estendibilità. Prevede un uso dinamico della banda. Infine utilizza una trasmissione ottica per ridurre le EMI con delle topologie implementabili: star, bus e cluster.
FlexRay
Sviluppato nel 2000 dal consorzio FlexRay (membri a vario titolo: BMW, DaimlerChrysler, Motorola, Philips, Bosch e GM, Ford, Fiat e Mazda , Audi e VW). È un protocollo di comunicazione per il controllo delle trasmissioni dati ad alta velocità: meccanica avanzata, telaio, sistemi by-wire e sistemi di trasmissione che richiedono sistemi di comunicazione deterministici e fault tolerant. Ha una velocità di trasmissione dati fino a 10 Mbps. La topologia consiste in connessioni punto-a-punto: a bus, a stella o misto (bus + stella). I vantaggi di questa connessione sono:
➤ terminazioni bus ideali (riflessione minima);
➤ comportamento elettrico definito;
➤ scalabilità, composability e flexibility;
➤ limitazione dell’errore ai soli rami interessati;
➤ comportamento EMC ottimale.
La trasmissione è compatibile con fibre ottiche o linee in rame. Possono essere connessi fino a 64 nodi di rete.
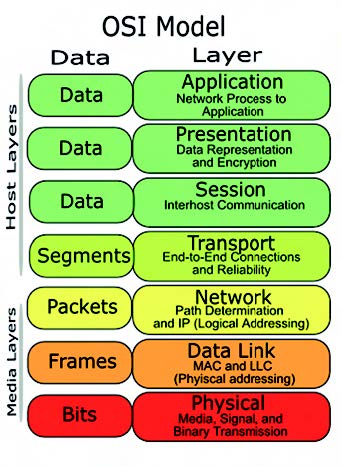
Figura 5: impacchettamento multiplo e comunicazione
nel modello OSI.
Domestic Digital Data Bus (D2B)
Matsushita e Philips si sono uniti per sviluppare il Domestic Data Bus (D2B) standard all’inizio degli anni ‘90, che l’Optical Chip Consortium (C&C Electronics, Becker, e altri) ha promosso dal 1992. Domestic Digital Bus [D2B] è una rete ottica per la connessione di audio, video, periferiche per computer e componenti telefonici in un’unica struttura ad anello nel veicolo. Mercedes-Benz usa una combinazione topologica tra anello e stella che raggiunge il data rate di 5.6Mbps, la lunghezza massima della fibra ottica totale è di 10 metri o 7 metri in base alle configurazioni. La Classe S della Mercedes Benz usa il bus ottico D2B per la rete radio, l’autopilota e l’impianto CD, la connessione tele-assistenza, il telefono cellulare e l’applicazione riconoscimento vocale Linguatronic.
SMARTwireX
Il bus SMARTwireX è un protocollo che definisce il solo livello fisico. Inizialmente progettato per supportare il bus D2B, raggiunge i 25Mbps su cablaggio standard a basso costo UTP con una compatibilità alle emissioni elettromagnetiche pienamente automotive. In seguito SMARTwireX ha assunto una valenza di livello fisico a disposizione di altri protocolli di rete. La massima lunghezza del bus è di 150 mt.
IDB-1394 Bus
L’IDB-1394 Bus è la versione automotive dell’IEEE 1394 conosciuto anche come Firewire. Questo protocollo definisce quattro livelli: il livello fisico J2366-1, livello Link J2366-2, livello trasporto J2366-4, livello applicazione J2366-7. Tale protocollo è stato utilizzato in principio per devices consumer su doppini non schermati.
IEBus
Inter Equipment Bus [IEBus] è un protocollo sviluppato da NEC per l’automotive che supporta la comunicazione multimaster half duplex asincrona con metodo di accesso CSMA/CD. Sono usate due linee differenziali: Data+ / Data-. Sono standardizzati due modi di comunicazione: Mode 0 che usa frame da 16 byte e data rate 3.9kbps [6MHz Osc.] o 4.1kbps [6.29MHz Osc.] e Mode 1 che usa frame da 32 byte e data rate 17kbps [6MHz Osc.] o 18kbps [6.29MHz Osc.]. Nelle diverse configurazioni sono realizzabili un massimo di 50 unità connesse al bus e una lunghezza massima di 50 metri.
LIN Bus
É stato sviluppato dal 1999 dal Consorzio LIN formato principalmente da Audi, BMW, DaimlerChrysler, Motorola, Inc, Volcano Technologies, Volkswagen, Volvo car, ecc. per essere utilizzato sulle unità assemblate, come le porte, il volante, i sedili, la climatizzazione, le luci e i sensori di pioggia. É un protocollo di comunicazione seriale con un singlewire a 12V (standard ISO 9141), basato su dei byte-word, con delle interfacce SCI/UART, con un unico nodo master e più nodi slave, con sincronizzazione per i nodi senza una base dei tempi stabilizzata. LIN è una tipico protocollo di classe A (SAE), raggiunge una velocità fino a 20 kbit/s (per limitazioni di EMI con cavo unico). Ha il vantaggio di realizzare l’autosincronizzazione tra i nodi senza oscillatori nei nodi slave, garantisce tempi di latenza limitati per la trasmissione. La comunicazione come già sottolineato è master/slave dove il master ha il controllo completo sia del bus, su cui vengono immessi i dati, sia del protocollo di comunicazione, e determina il momento in cui avviare il trasferimento di messaggi sul canale a tutti i nodi slave. Mentre lo slave è uno dei nodi (da 1 a 15) presenti sul canale che può ricevere o trasmettere dati quando il MASTER lo ritiene opportuno. É possibile comunicare segnali direttamente da SLAVE a SLAVE senza passare attraverso il nodo master.
CAN Bus
Il Controller Area Network, noto anche come CAN-bus, è uno standard seriale per bus di campo principalmente in ambiente automotive di tipo multicast, introdotto negli anni ottanta dalla Robert Bosch GmbH, per collegare diverse unità di controllo elettronico (ECU). Il CAN è stato espressamente progettato per funzionare senza problemi anche in ambienti fortemente disturbati dalla presenza di onde elettromagnetiche e può utilizzare come mezzo trasmissivo una linea a differenza di potenziale bilanciata come la RS-485. L’immunità ai disturbi EMC può essere ulteriormente aumentata utilizzando cavi di tipo twisted pair (doppino intrecciato). Sebbene inizialmente applicata esclusivamente in ambito automotive, come bus per autoveicoli, attualmente è usata in molte applicazioni industriali di tipo embedded, dove è richiesto un alto livello di immunità ai disturbi. Il bit rate può raggiungere 1 Mbit/s per reti lunghe meno di 40 m. Il protocollo di comunicazione del CAN è standardizzato come ISO 11898-1 (2003). Questo standard descrive principalmente lo strato data link, e alcuni aspetti dello strato fisico (physical layer) secondo il modello ISO/OSI (ISO/OSI Reference Model) sopra riportato.
Intellibus
Sviluppato da Boing inizialmente per applicazioni avioniche militari, solo in seguito è stato impiegato per applicazioni automotive. Simile al CAN nell’idea base con uguali limitazioni e inefficienze. Intellibus opera ad un data rate di 12.5Mbps, viene utilizzato nel controllo elettronico dei motori, delle trasmissioni ed in altri sistemi a bordo veicolo come sistemi drive-by-wire. L’approccio alla comunicazione è master/slave con codifica Manchester su doppino. La massima lunghezza del bus è di 30 metri a 12.5Mbps con al massimo 64 nodi. È praticamente un bus di classe B o C secondo la classificazione SAE.
OBDII Bus
OBD2 [On-Board Diagnostics II] è un protocollo di comunicazione e al contempo un connettore standard per acquisire dati da veicoli per il trasporto passeggeri. È stato richiesto dall’U.S. EPA su tutte i veicoli diesel e i veicoli LDT (Light Duty Trucks) dal 1996 per monitorare l’emissioni dei motori. OBDII è impiegato principalmente nel controllo e la segnalazione legata ad una spia chiamata MIL (malfunction indicator lamp) conosciuta anche come ‘check engine’.
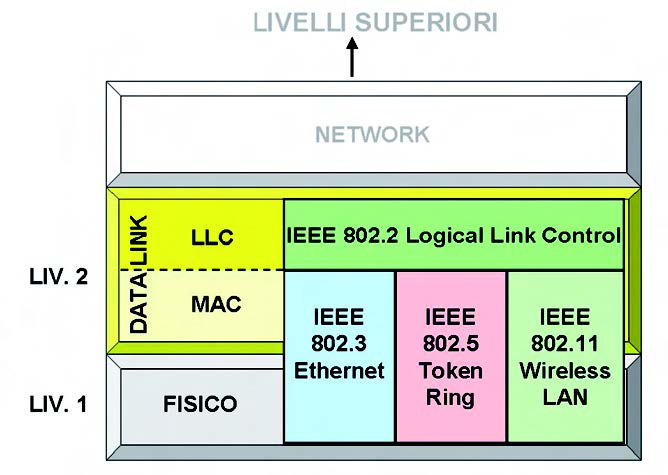
Figura 4: stack ISO/OSI per 802.X.
Conclusioni
La versione CAN 2.0 è entrata nell’auto nel 1992 e si è solidamente affermata, ma tutt’oggi chi l’utilizza non osa spingerne le prestazioni alla massima velocità dati di 1 Mbit al secondo, temendo le difficili condizioni elettromagnetiche ambientali. Circa il bus a bassa velocità e basso costo LIN (Local Interconnect Network), è usato per lo più per l’interconnessione fra sensori ed attuatori d’intelligenza limitata, gestibili da un sistema di controllo centralizzato, nel quale il master di ogni cluster LIN lavora come se fosse il gateway di una rete di bus multipli a velocità più elevata. In soli quattro anni, LIN è cresciuto molto dalla sua primordiale implementazione del 2001, per arrivare alle versioni più moder ne del 2005 che contavano una maggiore complessità ed un maggior numero d’implementazioni da parte dei car-maker. Veniamo alle note futuristiche, nell’anno 2000 è stato fondato il consorzio FlexRay che ha pubblicato le sue specifiche finali dopo cinque anni. Grazie a questo lavoro, il protocollo di comunicazione FlexRay 2.1 è stato messo a punto non solo per trasferire i dati nelle infrastrutture automotive alla velocità deterministica di 10 Mbit al secondo, ma anche per permettere di creare sistemi automotive distribuiti immuni dai guasti. Queste caratteristiche rappresentano gli ingredienti essenziali per permettere l’integrazione delle informazioni acquisite dai sensori applicati in auto sugli apparati elettronici e sui sistemi di sicurezza, condizione indispensabile per sviluppare sistemi di sicurezza attiva realmente efficaci. FlexRay ha tutte le carte in regola per diventare, il ‘nuovo’ CAN, una funzionalità standard nei microcontrollori per automobile. Circa alcuni standard di multiplexing più specializzati che abbiamo preso in considerazione, come IEBus, J1850, D2B e IDB-1394, non hanno molte chance di restare a lungo a bordo auto. Il bus MOST introdotto nel 1998 non ha mantenuto l’originaria promessa di diventare un mezzo di comunicazione economico per le applicazioni d’infotainment, a causa dell’assenza di uno standard realmente aperto che potesse permetter ne la sperimentazione completa. Il futuro delle reti a bordo auto riguarderà le tecnologie concepite e sviluppate per l’automotive, capaci, quindi, di risolvere i problemi specifici di questi sistemi in termini di affidabilità, sicurezza e determinismo nella gestione delle informazioni.
