Tutti noi utilizziamo quotidianamente dispositivi elettronici che contengono almeno un circuito a ponte. Molti tra noi hanno utilizzato, almeno in qualche occasione, le sue forme più comuni in fase di progetto. Pochi però possono affermare di conoscere in dettaglio tutte le diverse applicazioni di questo utilissimo schema circuitale, accuratamente descritte nelle pagine che seguono.
IL CONVERTITORE FULL-BRIDGE
Come si evince dallo stesso nome, si tratta di un circuito convertitore, nello specifico DC-DC, e viene realizzato mediante una struttura circuitale a ponte, il circuito è meglio conosciuto come H-Bridge, proprio per la sua geometria a forma di H. Viene utilizzato principalmente negli azionamenti per i motori in corrente continua, e spesso anche come convertitore DC-AC con segnale in alternata di tipo sinusoidale, ad esempio, nei gruppi di continuità monofase, oppure con il segnale in alternata ad alta frequenza, ad esempio, negli alimentatori a commutazione. In ognuno dei possibili utilizzi elencati, la topologia del circuito non cambia, cambia invece il tipo di controllo sui segnali di accensione dei singoli dispositivi di potenza in funzione dell’applicazione del circuito stesso. In questa sede, vedremo una veloce, seppur esaustiva, descrizione del ponte ad H, comunemente utilizzato negli azionamenti a corrente continua. Facendo riferimento al circuito mostrato nella Figura 2 (cfr. I circuiti a ponte - Parte 2), i componenti di potenza presenti possono essere accesi o spenti dall’utente mediante opportuni segnali di controllo, il circuito viene alimentato da un tensione continua, così come la tensione in uscita, ovvero quella presente ai capi del carico. Il circuito permette quindi di controllare l’ampiezza e il segno della tensione d’uscita e di conseguenza ampiezza e segno ai capi del carico, in funzione dei segnali di controllo inviati ai dispositivi di potenza. In questo modo, è possibile far funzionare il circuito in tutti i quattro quadranti del piano cartesiano Io-Vo, e la potenza può fluire nel convertitore in entrambi i sensi, ovvero si può sia alimentare il motore che recuperare potenza quando quest’ultimo va in frenatura. Il principio di funzionamento è abbastanza semplice: la corrente fluisce sul carico quando due dei quattro dispositivi di potenza sono accesi, ovviamente i due dispositivi accesi non devono mai trovarsi sullo stesso ramo del ponte, altrimenti si creerebbe un corto circuito. Facendo sempre riferimento alla Figura 1, T1 e T3 (o T2 e T4) non devono mai trovarsi contemporaneamente accesi, mentre l’accensione contemporanea di T1 e T2 (o T3 e T4) non produce alcun effetto sul circuito.
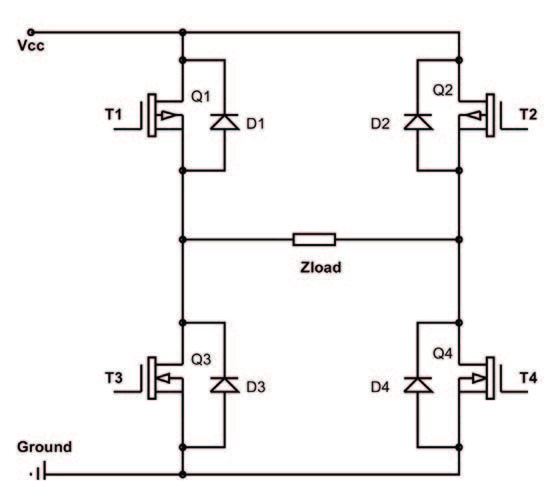
Figura 1: H-Bridge
Le combinazioni rimaste ovvero T1 e T4 contemporaneamente accesi nonché T2 e T3 contemporaneamente accesi, sono quelle che permettono alla corrente di scorrere sul carico in un senso o nel suo opposto. Il circuito appena descritto permette quindi in modo molto semplice di pilotare un generico carico, tuttavia, venendo usato per il pilotaggio di motori in continua, ovvero un’impedenza con una componente resistiva e reattiva, con alte tensioni di alimentazione, necessita di alcuni piccoli accorgimenti. Innanzitutto, sono necessari dei diodi di ricircolo ai capi dei dispositivi di potenza in modo da dissipare l’eventuale corrente rimasta sull’induttore o sui circuiti di potenza. Inoltre, al fine di evitare possibili corto circuiti su uno dei due rami del ponte, è necessario durante il funzionamento un piccolo tempo morto tra il momento in cui viene spento un dispositivo e il momento in cui viene acceso l’altro dispositivo presente sullo stesso ramo. Il valore di questo tempo morto dipende dai tempi d’accensione e di spegnimento dei dispositivi di potenza che costituiscono il ponte, spesso il tempo d’accensione e di spegnimento di un dispositivo sono diversi, il tempo morto in questi casi sarà il maggiore dei due. Per quanto riguarda i segnali di controllo con cui vengono comandati i dispositivi, questi dipendono dalla tipologia di dispositivo utilizzato per il ponte nonché dal controllo stesso che si vuole implementare. I due dispositivi vengono accesi o spenti tramite l’utilizzo di segnali modulati in larghezza (PWM), la cui frequenza sarà uguale alla frequenza di commutazione mentre il duty cycle è funzione dell’applicazione. Inoltre, sempre in funzione dell’applicazione, si deciderà se accendere i due dispositivi contemporaneamente, mediante l’utilizzo di un unico segnale di controllo, o mediante l’utilizzo di due segnali distinti.
CIRCUITI OSCILLATORI
Per oscillatore si intende un circuito capace di generare in uscita segnali di forma, frequenza e ampiezze diverse in assenza di segnali d’ingresso. Le tipologie di oscillatori sono molteplici e variano al variare della forma d’onda d’uscita e del loro utilizzo, in questa sede daremo soltanto un breve descrizione del principio di funzionamento, trattando in particolare gli oscillatori armonici o sinusoidali, per poi vedere come è possibile crearne uno utilizzando un circuito a ponte, ovvero, il ponte di Wien.
PRINCIPIO DI FUNZIONAMEMENTO DEGLI OSCILLATORI
Focalizzando l’attenzione sugli oscillatori sinusoidali, si tratta appunto di dispositivi in grado di generare forme d’onda di tipo sinusoidale, sfruttando soltanto la tensione di alimentazione del circuito, quindi l’oscillatore è in grado di generare una risposta libera, ovvero in assenza di forma d’onda d’ingresso, di tipo sinusoidale ad una determinata frequenza ed ampiezza, costante nel tempo quindi la forma d’onda non risente dei comuni fenomeni di smorzamento. Un circuito di questo tipo si ottiene tramite una configurazione retroattiva, come quella mostrata nella Figura 3 (cfr. I circuiti a ponte - Parte 2), la tensione d’uscita ha una forma sinusoidale costante nel tempo, se il circuito è capace di autorigenerarsi nel tempo, compensando quindi fenomeni dissipatori intrinsecamente contenuti nel circuito.
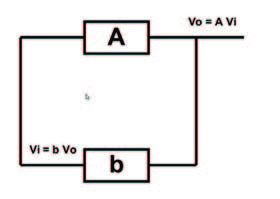
Figura 2: Schema Retroazione
Partendo dalla configurazione mostrata in figura, la tensione, Vi, in ingresso al blocco con guadagno “A”, diventa in uscita da quest’ultimo:
![]()
La tensione Vo va sia in uscita che in ingresso al blocco con guadagno “b”, il quale a sua volta restituisce una tensione, coincidente con quella precedentemente chiamata Vi, quindi:
mettendo insieme le due espressioni ottenute si ricava:
In conclusione, affinché le due Vo presenti nell’equazione coincidano deve valere:
![]()
L’espressione appena trovata esprime matematicamente quello che è meglio conosciuto come “Criterio di Barkhausen”, ovvero un circuito retroazionato costituito da due sottoblocchi è capace di produrre una forma d’onda costante in ampiezza nel tempo, se esiste una frequenza, e quindi una pulsazione, tale che alla suddetta frequenza la cascata dei due sottoblocchi abbia un guadagno unitario:
![]()
e produca uno sfasamento nullo:
![]()
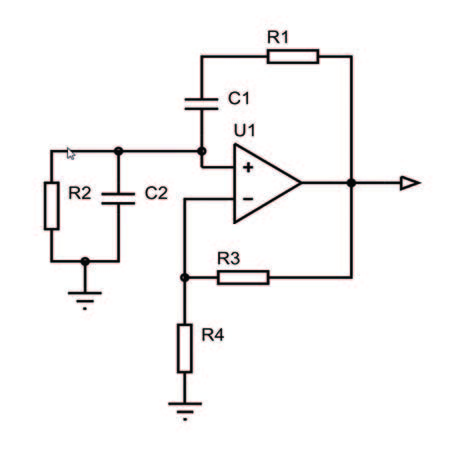
Figura 3: Ponte di Wien
IL PONTE DI WIEN
Questo circuito deve il proprio nome al suo ideatore Max Wien, tuttavia, quando fu ideato nel 1891, non esistevano ancora i dispositivi attivi, necessari per costruire i blocchi amplificatori presenti nella rete di retroazione, quindi la sua reale costruzione avvenne in tempi più recenti ad opera di William Hewlett. La forza di questo circuito sta nella sua capacità di tenere costante la frequenza d’oscillazione e nella stabilizzazione dell’ampiezza della forma d’onda in uscita. Considerando R1 = R2 = R e C1 = C2 = C, il guadagno totale del circuito vale:
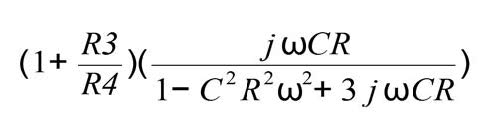
Questo diventa reale se vale la condizione:
![]()
Sotto questa condizione, si può facilmente calcolare la pulsazione e la frequenza del circuito:
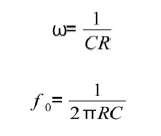
Sostituendo nell’espressione del guadagno il valore della pulsazione appena calcolata, ed imponendo il criterio di Barkhausen sul guadagno si ottiene:
Quest’ultima è valida se e solo se R3 = 2R4. Ricapitolando, il ponte di Wien è un circuito capace di produrre un'onda sinusoidale di frequenza costante nel tempo, il valore in Hertz di questa dipende dai valori di capacità e resistenza presenti sull’ingresso positivo dell’amplificatore operazionale, mentre il corretto dimensionamento dei componenti presenti sull’ingresso negativo influenza la rete di retroazione, ovvero, la forma d’onda in uscita del circuito.
