
I sistemi display 3D autostereoscopici offrono agli utenti finali la possibilità di usufruire di un'esperienza 3D senza occhialini con migliore qualità dell'immagine rispetto alla tecnologia della generazione precedente. In questo articolo concentreremo la discussione sui display 3D progettati per l'uso desktop che traggono particolare vantaggio dagli elementi microottici. Dopo un'introduzione ai meccanismi alla base della visione binoculare, l'articolo andrà ad analizzare un caso specifico di display autostereoscopico.
Introduzione
Un display tridimensionale può offrire agli utenti finali una nuova esperienza con una qualità dell'immagine notevolmente migliorata rispetto alla tecnologia della generazione precedente. I display autostereoscopici basati su elementi microottici utilizzano svariate tecnologie tra le quali barriere di parallasse, array lenticolari, micro-polarizzatori ed elementi ottici olografici per permettere all'osservatore di godere di un'immagine tridimensionale senza l'ausilio degli appositi occhialini. In questo articolo andremo a descrivere un caso specifico di tecnologia per display autostereoscopico: il sistema a due viste con doppio schermo LCD. Prima però occorre capire come funziona il meccanismo della percezione della profondità. La visione binoculare offre agli esseri umani il vantaggio della percezione della profondità derivato dalle piccole differenze nella posizione di punti corrispondenti nelle due immagini incidenti sulla retina degli occhi. Questo fenomeno è noto come stereopsi e può fornire informazioni precise sulle relazioni di profondità degli oggetti in una scena. Il sistema visivo umano utilizza però anche altri elementi di profondità per aiutare a interpretare le due immagini incidenti sulla retina e da queste costruire un modello mentale 3D del mondo. Questi elementi includono segnali di profondità monoculare e oculomotori in aggiunta al segnale stereoscopico.
Profondità monoculare
I segnali di profondità monoculare sono tali che nel tempo gli osservatori apprendono il significato fisico delle diverse immagini retiniche e la loro relazione con gli oggetti nel mondo reale. Queste relazioni includono:
- Interposizione - gli oggetti che si occludono l'un l'altro suggeriscono il loro ordinamento in profondità.
- Prospettiva lineare - uno stesso oggetto a distanze diverse proietta immagini di dimensioni diverse sulla retina.
- Luce e ombra - il modo in cui la luce viene riflessa dagli oggetti fornisce suggerimenti sulle loro relazioni di profondità.
- Dimensione relativa - un oggetto con un'immagine retinica più piccola viene giudicato più lontano rispetto allo stesso oggetto con un'immagine retinica più grande.
- Texture Gradient - una texture di oggetti di dimensioni costanti, come ciottoli o erba, varierà di dimensioni sulla retina con la distanza.
- Prospettiva aerea - l'atmosfera influisce sulla luce che la attraversa, ad esempio a causa di nebbia, polvere o pioggia. Quando la luce percorre lunghe distanze subisce fenomeni di dispersione, perdita di saturazione dei colori, i bordi netti diventano diffusi e la tonalità del colore viene spostata verso il blu.
I segnali oculomotori sono generalmente considerati come aventi un potenziale limitato nell'aiutare a giudicare la profondità.
Profondità binoculare
Nel mondo naturale
Estrarre informazioni tridimensionali dalle immagini percepite dai due occhi è un problema fondamentale per il sistema visivo. In molti animali tali informazioni derivano dalla disparità binoculare, ovvero dal fatto che i due occhi rivolti in avanti hanno un punto di vista leggermente diverso. La disparità binoculare viene elaborata dal cervello dando la sensazione di profondità nota come stereopsi. La percezione della profondità stereo è illustrata nella Figura 1(a). I due occhi dirigono gli assi visivi in modo da fissare il punto F e regolare la loro accomodazione visiva in modo che i punti nello spazio intorno a F vengano messi a fuoco.
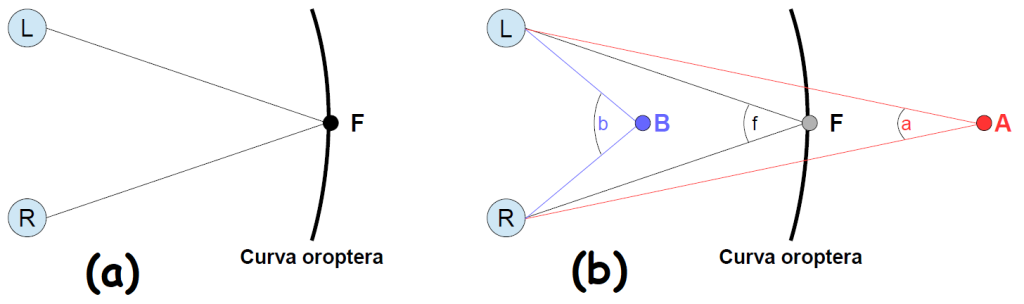
Figura 1: (a) La geometria della visione binoculare durante la visione del mondo naturale. (b) La disparità angolare è definita rispetto al punto di fissazione corrente
Il punto di convergenza F, si proietta nella stessa posizione su ciascuna retina e quindi ha zero disparità retinica, cioè non c'è differenza nella sua posizione nelle immagini retiniche di destra e di sinistra. I punti davanti o dietro il punto F proiettano posizioni diverse sulle due retine (sinistra e destra) e la risultante disparità binoculare fornisce al cervello dell'osservatore l'indicazione di profondità stereoscopica. Il giudizio di profondità è relativo al punto di convergenza corrente F, ed è più utile per formulare giudizi sulla profondità relativa piuttosto che assoluta degli oggetti in una scena. I punti nello spazio, diversi da F, che proiettano disparità retinica pari a zero sono percepiti alla stessa profondità del punto di convergenza; tutti i punti che proiettano zero disparità retinica sono descritti come su una superficie nello spazio nota come curva oroptera. La forma della curva mostrata nella Figura 1 è solo illustrativa, nella realtà assume una forma complessa e con caratteristiche non lineari. Geometricamente possiamo definire la disparità angolare α, come la differenza tra gli angoli di convergenza nel punto F e nel punto di interesse. Nella Figura 1(b), i punti dietro il punto F, come A, hanno disparità positiva, mentre i punti davanti il punto F, come B, hanno disparità negativa:
αa = f - a > 0
αb = f - b < 0
Il più piccolo cambiamento percettibile nella disparità angolare tra due piccoli oggetti è indicato come acuità stereo δ. Risulta utile sapere come l'acuità si traduce in termini di minima distanza percepita tra oggetti nel raggio di visualizzazione tipico di un display 3D desktop. Questo ci permetterà di confrontare la capacità dell'occhio di percepire la profondità con la capacità di diversi design di display di riprodurla. Dopo una serie di calcoli, che non riportiamo, si può affermare che la visione binoculare utilizza il segnale di profondità stereoscopica della disparità retinica per percepire la profondità di un oggetto rispetto al punto di fissazione dei due occhi. A distanza ravvicinata, questo fornisce un alto grado di discriminazione della profondità; ciò è vero fino a distanze di decine di metri dall'osservatore consentendo la percezione della profondità relativa per oggetti più grandi.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2281 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Una rete LoRa per usi domestici: architettura e hardware
Diodi: illuminazione da dispositivi optoelettronici

Bluetooth NLC: il nuovo standard per l’illuminazione smart
Hardware e software embedded spingono l’Intelligenza Artificiale verso l’edge

Soluzioni audio per i propri progetti
