
Secondo appuntamento con la serie "La Misura della Forza in Elettronica" della Rubrica Firmware Reload di Elettronica Open Source. All'interno di questa rubrica potrete leggere articoli inerenti la progettazione elettronica, i microcontrollori e le applicazioni embedded, appartenenti alla passata rivista cartacea Firmware.
GLI ESTENSIMETRI RESISTIVI
Il principio di funzionamento di un estensimetro deriva direttamente dal concetto di forza elastica, ovvero quello di un corpo che, sottoposto ad una forza esterna, si deforma in modo proporzionale a questa, creando al suo interno forze atte a contrastare la forza stessa. Se il corpo è sufficientemente elastico, una volta cessata la forza esterna questo ritornerà nella sua forma originale, annullando le forze interne createsi precedentemente. Combinando la relazione Forza/Deformazione espressa dalla legge di Hook:
F = kρ
dove F è la forza che agisce sul corpo, k è la costante elastica del materiale e σ è la deformazione (si consideri il caso più semplice di deformazione lineare) dovuta alla forza e la seconda legge di Ohm:
R = ρ(A/l)
dove R è la resistenza elettrica del materiale, A ed l sono rispettivamente l’area e la lunghezza di quest’ultimo mentre con ρ si indica la resistività intrinseca del materiale. E' possibile ottenere una misura indiretta della forza al variare della resistenza elettrica del materiale che costituisce il sensore. Nel caso più semplice di deformazione lineare si otterrà ad esempio una legge del tipo:
R =ρAk/F
IL SENSORE FSR400
Il sensore FSR400 della Interlink Electronics è un tipo di estensimetro resistivo, nello specifico appartiene ad una famiglia di sensori di pressione a semiconduttore, composti da un sottile film conduttivo che, come tutti gli estensimetri, cambia la propria resistenza elettrica in modo inversamente proporzionale alla forza applicata su di essi. In dettaglio, il sensore FSR400 ha dimensioni ridotte (diametro esterno di 10 mm, di cui circa 7,62 mm effettivi), un costo ridotto ed un'alta robustezza meccanica; caratteristiche che lo portano ad essere una valida soluzione non solo nelle applicazioni tipicamente più automatiche, ad esempio una valvola la cui apertura è funzione di una certa forza o pressione, ma si adatta bene anche in applicazioni controllate e regolate dal contatto umano, come ad esempio in un joystick con una dimensione in più rispetto ad un modello Figura 1: Interlink Electronics FSR400 standard, la pressione dei tasti appunto.

Figura 1: Interlink Electronics FSR400
Come descritto, il sensore si presenta come una banale resistenza variabile, con il valore di quest’ultima che varia in modo inversamente proporzionale alla forza applicata su di esso. Nella Figura 2 viene riportata la curva di relazione tra la forza applicata (in grammi) e la resistenza (in kOhm) ai suoi capi. Come visibile nel tracciato, la curva è chiaramente non lineare, la resistenza del sensore decresce bruscamente per valori di forza inferiori a 20 grammi ca, per poi assumere un andamento a variazione quasi quadratica per valori di forza maggiori. La prima di queste caratteristiche, ovvero la brusca variazione di resistenza, è dovuta alla costruzione stessa del sensore ed alle proprietà meccaniche dei materiali, mentre per quanto riguarda l’andamento quadratico della curva, quest’ultimo è funzione della forma del sensore nonché dell’area di contatto.
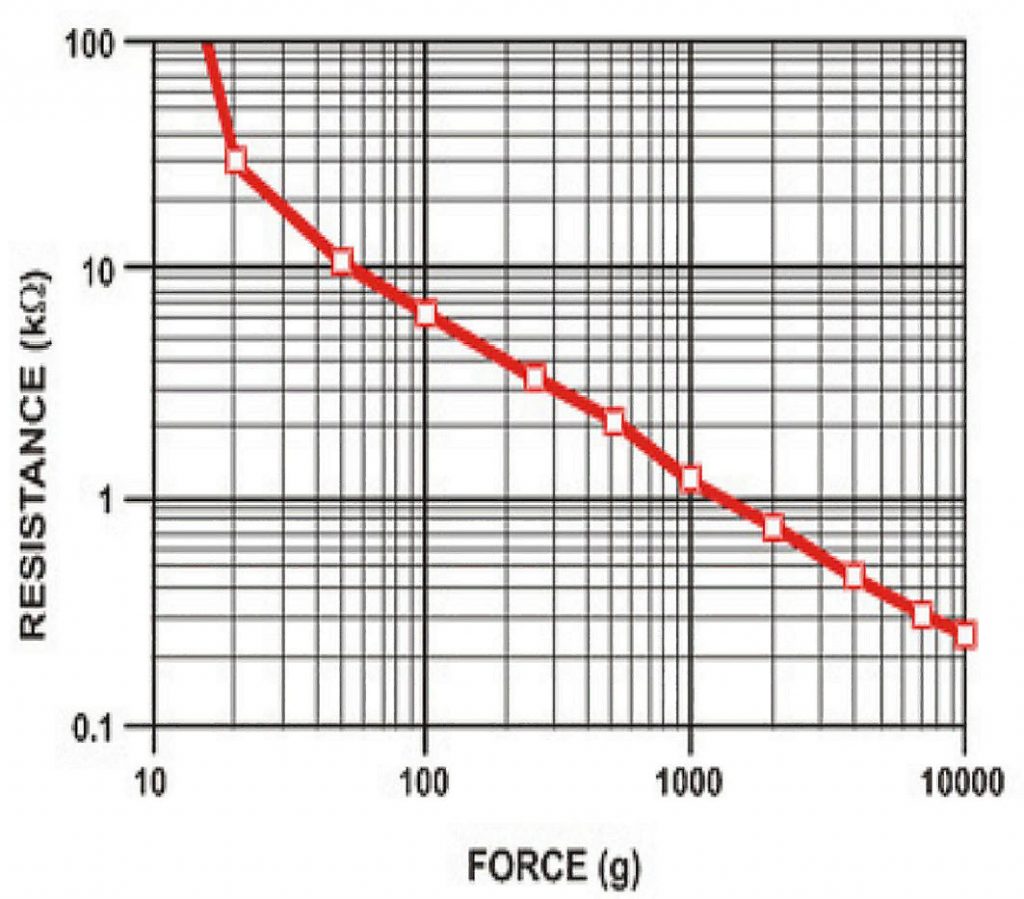
Figura 2: Curva Caratteristica Forza/Resistenza del Sensore
Infatti, come si vede nella Figura 1, l’area attiva del sensore è un cerchio, mentre per quanto riguarda l’area di contatto, quest’ultima assume quasi sempre la forma di un ellissoide (si pensi ad un dito che preme contro un corpo rigido), ovvero quella proiettata sul piano del sensore da un'ellisse. Cerchio ed ellisse appartengono alla stessa famiglia di quadriche descritte mediante equazioni del secondo ordine anche se, come vedremo in seguito, la scelta più semplice per modellare una curva come quella mostrata nella Figura 2 (vedi Puntata 1) è la parabola.
Equazione Canonica del Cerchio:
x2+y2+ax+by+c=0
Equazione Canonica dell’Ellisse:
a2x2+b2y2-a2b2=0
Equazione Canonica della Parabola:
ax2+bx+c-y=0
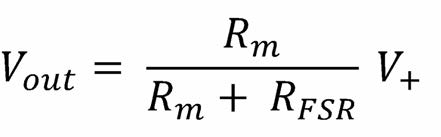
La misura della forza viene fatta misurando la variazione di resistenza del sensore, il circuito di condizionamento più semplice da usare per questo tipo di misurazioni è il classico partitore di tensione.

Figura 3: Circuito di Condizionamento
La tensione misurata in uscita dall’amplificatore operazionale (viene usato come buffer di tensione per la sua resistenza d’ingresso idealmente infinita) è funzione della resistenza del sensore.
Al variare della seconda resistenza (Rm) del partitore varia la curva forza/tensione; in Figura 4 sono riportati alcuni valori tipici.
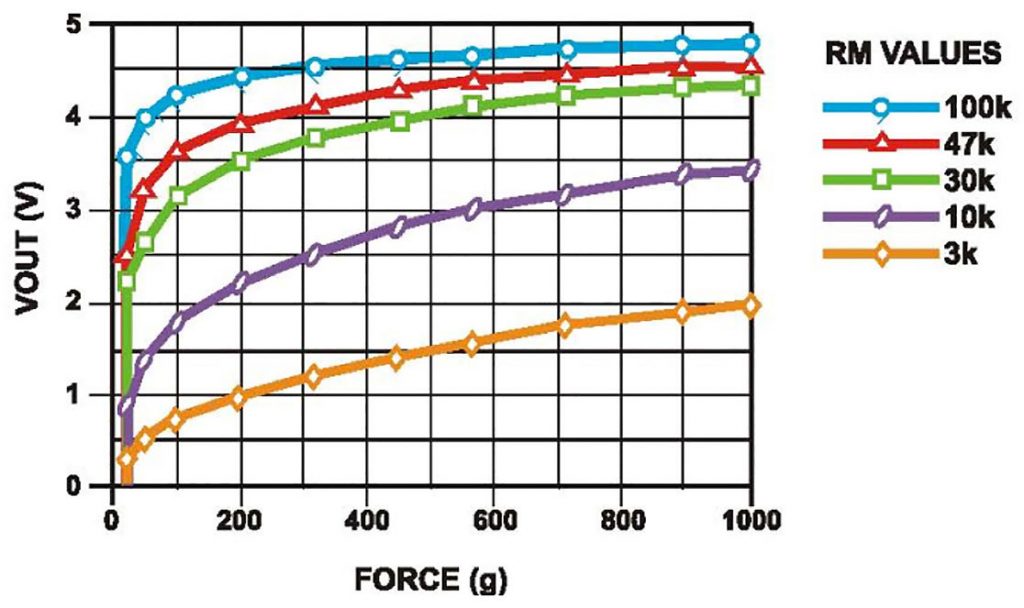
Figura 4: Curva Forza/Tensione al variare di Rm

