In questo articolo della Rubrica Firmware Reload viene descritto il chip LDC1000, un versatile dispositivo di TI, che con la sua realizzazione ci viene incontro per risolvere una serie di esigenze e di problemi che molto spesso si devono affrontare nell’ambito dei sensori industriali.
Introduzione
Tutte le grandezze elettriche possono essere impiegate per acquisire segnali proporzionali a grandezze fisiche, in conformità a varie tecnologie. Abbiamo quindi sensori che rappresentano la grandezza misurata con tensione elettrica, corrente, frequenza, resistenza, capacità. I convertitori Analogico-Digitali lavorano direttamente con tensioni e correnti, da qualche tempo sono disponibili convertitori monolitici Capacità - Dato Digitale (vedi Rif. 1). Da tempo sono disponibili componenti in grado di realizzare conversioni tra frequenza e tensione con buone caratteristiche, almeno a frequenze dell’ordine di qualche decina di kHz. I sensori basati su effetti induttivi esistono, ma richiedono una circuiteria di interfaccia più complessa (vedi Rif. 2). Oggetto di questo articolo è l’introduzione di LDC1000, il primo convertitore monolitico Induttanza-Dato Digitale, recentemente introdotto da Texas Instruments.
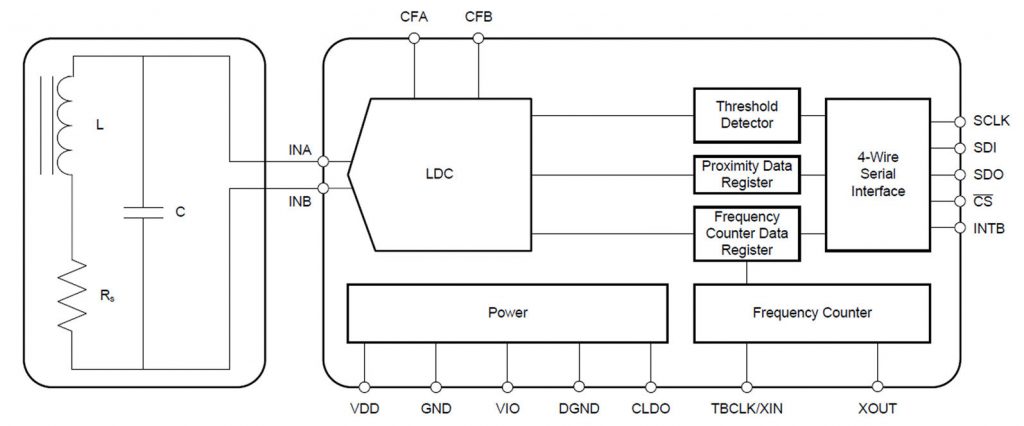
Figura 1: Diagramma a blocchi (fonte: datasheet LDC1000, Texas Instruments)
LDC1000
Si tratta di un circuito integrato che realizza un sensore senza contatto, a corto raggio, capace di risoluzioni inferiori al micron (un millesimo di millimetro), quando viene usato come sensore di posizione. Non è influenzato dalla presenza di polvere, umidità, sporco, operando in modo affidabile anche in ambienti ostili. Non sono al momento disponibili informazioni circa il comportamento in ambienti caratterizzati da elevato rumore elettromagnetico. È probabile che maggiori informazioni in tal senso si possano avere con un contatto diretto con la rete di assistenza applicativa del costruttore.
L’elemento sensore vero e proprio è una economica bobina che può essere realizzata in molti modi, anche stampata su PCB. L’assenza di parti in movimento e di contatto fisico con oggetti esterni contribuisce ad una elevata vita operativa. Il principio di funzionamento usato, descritto nel seguito, permette misure di posizione lineare ed angolare, spostamento, movimento, compressione, vibrazioni, tra l’altro, a costo estremamente basso. L’alimentazione può essere una singola sorgente 5V +/-5% anche se, per maggiore flessibilità, l’alimentazione dell’interfaccia digitale è separata e funziona tra 1,8V e 5,25V. Il consumo della porzione analogica del chip è tipicamente di 1,7mA, senza elemento sensore. La risoluzione offerta è molto elevata, va dai 16 ai 24 bit, quest’ultima è la risoluzione disponibile nella misura di induttanza. La precisione dichiarata è 0,1%. L’intervallo di frequenza in cui opera è compreso tra 5kHz e 5MHz, ovvero la frequenza di risonanza della rete LC necessaria al suo funzionamento. L’interfaccia digitale è costituita da una Serial Peripheral Interface, agevolando la connessione a qualsiasi microcontrollore. LDC1000 è offerto in un solo contenitore, il compatto SON16 a montaggio superficiale. Purtroppo questo non si presta bene al montaggio manuale, avendo scarsa accessibilità ai terminali di saldatura.
Questo problema può essere aggirato almeno per la fase di prototipazione, ricorrendo al modulo di valutazione di cui parleremo in seguito (vedi Rif. 4). Il modulo è facilmente sezionabile in tre parti, bobina sensore, LDC1000, microcontrollore, mantenendo accessibili le piazzole di saldatura. Connettendo la sezione centrale al nostro prototipo ci troviamo quindi il circuito integrato pre-saldato, evitando ogni rischio connesso ad un’impropria saldatura. Il contenitore è descritto in dettaglio nel foglio specifiche di LDC1000, vedi Rif. 3. Possiamo vedere in Figura 2 lo schema semplificato di una tipica applicazione di LDC1000. Tutto quanto necessario è un regolatore di tensione lineare, un microcontrollore che gestisce ed utilizza la misura ottenuta ed un sensore composto da una induttanza ed una capacità in parallelo (“sensor” in figura, sensore o “LC” nel seguito). Esempi di possibili applicazioni sono misuratori di flusso, sensori di posizione, misure di velocità e spostamento basate sul conteggio di denti di ingranaggi, sostituzione di pulsanti meccanici. I campi applicativi suggeriti comprendono notebook, game, stampanti multifunzione, macchine fotografiche digitali, automotive, dispositivi medici.
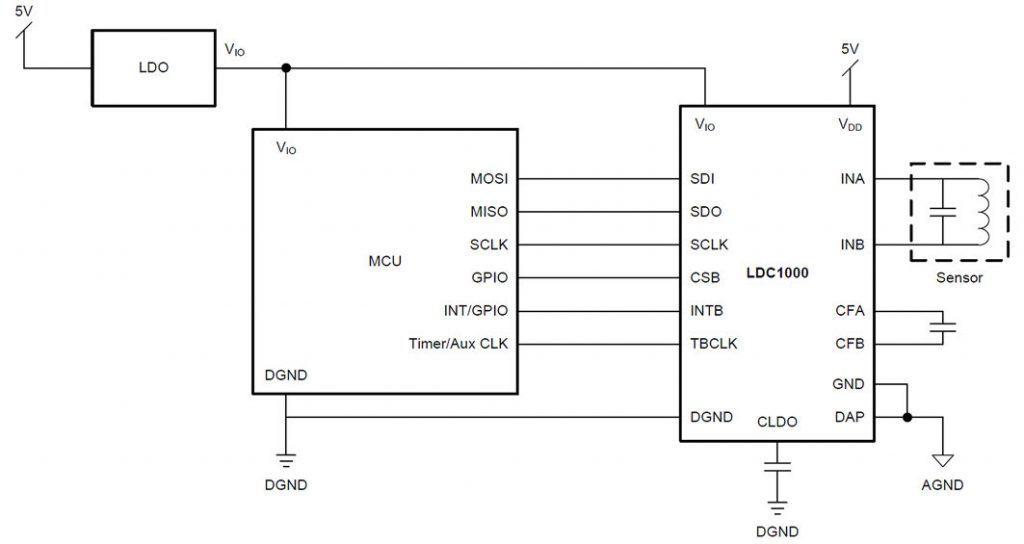
Figura 2: Applicazione tipica
PRINCIPIO DI FUNZIONAMENTO
Con un breve richiamo di elettrotecnica, ricordiamo che una corrente alternata circolante in un conduttore, una bobina in particolare, nel nostro caso, genera un campo elettromagnetico nello spazio circostante. Se un materiale conduttore viene avvicinato alla bobina, vedi Figura 3, si crea una corrente indotta sulla superficie dell’oggetto. Queste correnti sono chiamate “eddy currents” o correnti di Foucault, dal nome dello scienziato scopritore.
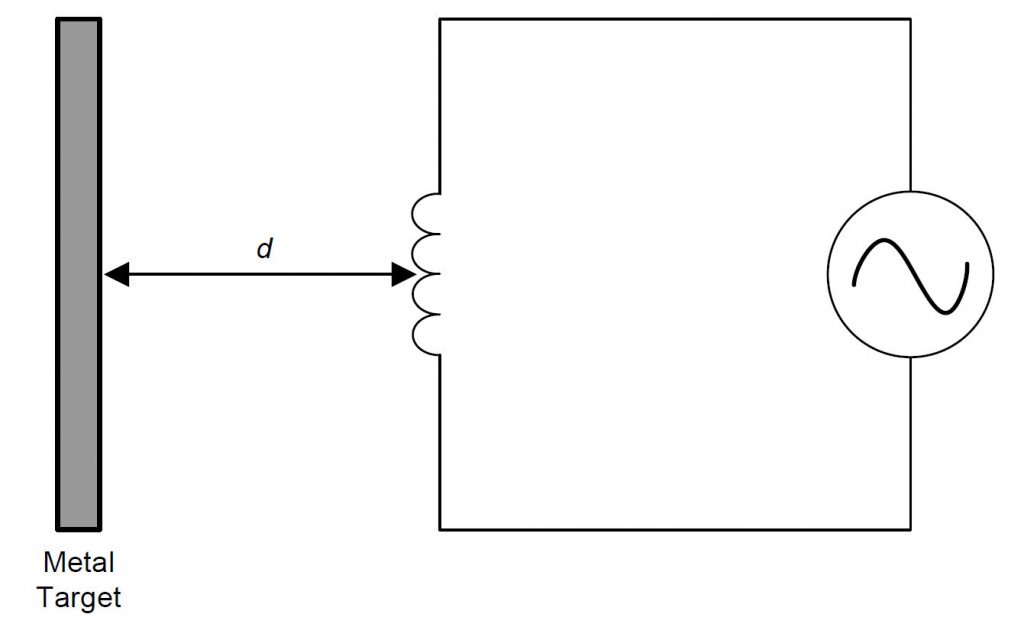
Figura 3: Principio di funzionamento del sensore induttivo
Il nome richiama il vortice creato dal remo nell’acqua mentre spinge una barca in avanti, vaga rassomiglianza con la distribuzione di queste correnti sulla superficie conduttrice. L’intensità delle correnti dipende dalla distanza dalla sorgente, dimensioni e composizione del conduttore. Le eddy currents, essendo correnti variabili, generano a loro volta un campo magnetico, opposto al campo sorgente. Di nuovo, il campo generato è elettromagnetico ma trascuriamo qui la componente elettrica, non interessante per i nostri scopi.
Il meccanismo descritto è concettualmente analogo ad un trasformatore, con l’avvolgimento primario formato dalla nostra bobina ed il secondario dai percorsi delle eddy currents. L’accoppiamento induttivo tra i due conduttori dipende da distanza, caratteristiche fisiche e forma dei conduttori. Quindi, resistenza ed induttanza del “secondario” appaiono riflesse nel circuito primario come funzione della distanza, una volta stabiliti i materiali coinvolti. Il tutto può essere descritto con un modello comprendente un trasformatore, vedi Figura 4.
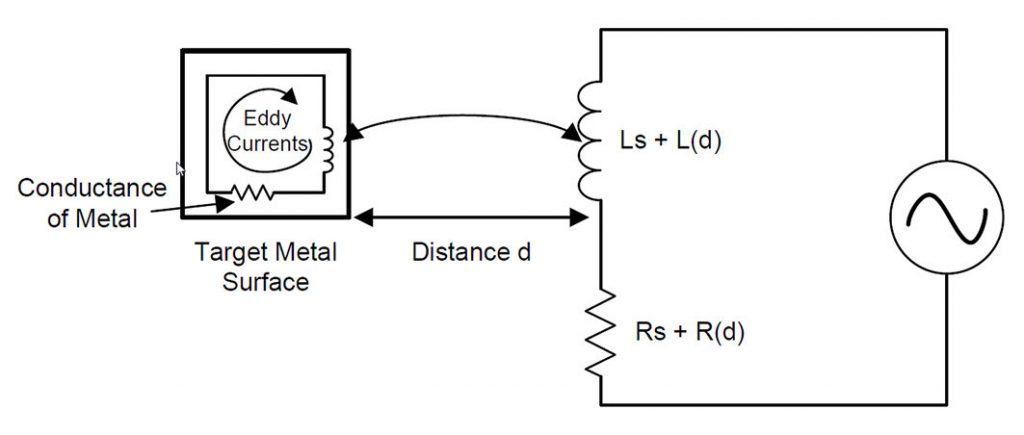
Figura 4: Modello elettrico del funzionamento basato sulle eddy currents
Nella Figura 4 l’induttanza L(d) è funzione della distanza e R(d) la resistenza parassita associata alle eddy currents. È interessante notare alcune peculiarità delle correnti di Foucault. Misurando il campo magnetico da esse generate, è possibile misurare, senza contatto, la conducibilità elettrica del materiale in cui circolano. Microfratture ed altre imperfezioni superficiali impediscono la formazione delle correnti di Foucault nelle aree ad esse associate. Quindi le eddy currents possono essere usate per test non distruttivi, nuovamente, senza contatto, su strutture particolarmente critiche in caso di logorio meccanico, come le ali di un aeroplano. Il circuito presentato in Figura 4 genera un campo magnetico con una induttanza e questo richiede un significativo consumo di potenza.
Una migliore soluzione consiste nell’aggiungere in parallelo un condensatore, formando un circuito risonante. Il consumo di potenza sarà ora sostanzialmente ridotto alle sole perdite nell’induttore, più le eddy currents stesse. LDC1000 misura l’impedenza della risonanza parallela LC e contemporaneamente la frequenza di risonanza. La misura è eseguita grazie ad un loop di retroazione che mantiene l’ampiezza di oscillazione ad un livello costante, monitorando l’energia dissipata nell’LC. In questo modo viene determinata l’impedenza, il cui valore viene reso disponibile come un valore digitale inversamente proporzionale all’impedenza stessa, vedi Figura 5.
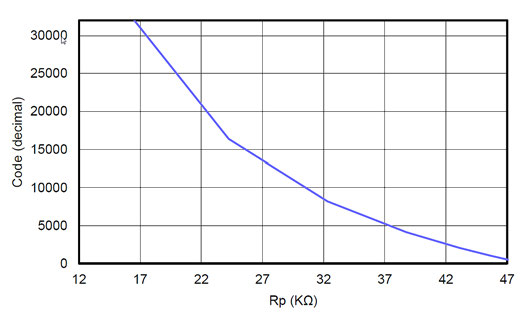
Figura 5: Caratteristica di trasferimento tra impedenza e codice digitale che mostra l’effetto di clipping a fondo scala
Contemporaneamente è misurata la frequenza di oscillazione, dalla quale si calcola l’induttanza del circuito LC, come vedremo meglio nel seguito. La frequenza è resa disponibile come valore digitale proporzionale alla grandezza misurata. LDC1000 lavora con un’ampia scelta di combinazioni LC, con frequenze di oscillazione tra 5 kHz e 5 MHz e impedenza compresa tra 798 ohm e 3,93 Mohm. Il campo di impedenza può essere considerato il fondo scala massimo di un convertitore ADC. Per avere la massima sensibilità, LDC1000 consente la programmazione del campo di misura in due registri Rp_MIN ed Rp_ MAX. Un capitolo del foglio specifiche è dedicato al calcolo dei valori da assegnare ai due registri.
Quando l’impedenza del circuito risonante scende sotto il valore programmato in Rp_MIN, il dato digitale è limitato al fondo scala. Questa situazione si presenta ad esempio quando l’oggetto target si avvicina troppo alla bobina sensore. Graficamente questo comportamento è descritto dalla funzione impedenza/codice riportata in Figura 5. Risoluzione e precisione sono due concetti diversi, da non confondere. La minima variazione della grandezza sotto misura rilevata, la risoluzione appunto, è molto elevata per LDC1000 ed è garantita per costruzione dal fornitore. L’errore massimo nella misura, la precisione, deve invece essere garantita applicazione per applicazione, attraverso una calibrazione che corregga offset ed errore di guadagno. Tipicamente tale calibrazione deve avere due punti di controllo per essere in grado di correggere entrambi i parametri. Nell’applicazione di LDC1000 è cruciale la scelta della scala di misura.
L’impedenza minima e massima devono essere conosciute ed impostate nei registri dedicati, come già accennato. È importante, per evitare errori grossolani dovuti a saturazione, che si resti all’interno della gamma così definita. A questo scopo il foglio specifiche raccomanda una procedura sperimentale per determinare Rp minima e massima nella propria applicazione. Praticamente ci si porta nella condizione di lettura minima e massima del proprio sensore e se ne misura l’impedenza di risonanza con un analizzatore di impedenza. I valori ottenuti sono corretti come suggerito dal datasheet per divenire i valori da caricare nei registri Rp_MIN ed Rp_MAX. Per ottimizzare la risoluzione, la gamma di misura non deve essere inutilmente ampia, ma garantire un margine di sicurezza sufficiente, centrata per comprendere la variazione di impedenza del sensore nell’applicazione specifica. LDC1000 ha un frequenzimetro digitale che consente di misurare direttamente la frequenza di oscillazione del sensore, vedi lo schema a blocchi in Figura 1.
La base dei tempi per il frequenzimetro può essere fornita da un quarzo connesso ai pin XTALIN/XTALOUT dell’integrato o venire fornita dall’esterno, ad esempio derivata dal clock del microcontrollore che gestisce l’applicazione. La frequenza è nota per misura diretta, il condensatore del sensore è noto per costruzione, quindi si può calcolare l’induttanza con la formula fornita dal datasheet (vedi Rif. 3). Notiamo che, malgrado il nome, LDC1000 in realtà misura impedenza e frequenza, non direttamente l’induttanza. LDC1000 può essere considerato come un piccolo laboratorio su microchip, interessante integrazione di vari strumenti, probabilmente precursore di altre realizzazioni simili.
È anche interessante fare qualche considerazione sul data-rate, ovvero il numero di misure ottenibili ogni secondo. Questo parametro dipende dalla frequenza operativa del sensore e dal valore del campo ‘Response Time’, nel registro di configurazione. I valori tipici ottenibili corrispondono a varie decine di migliaia di misure al secondo. LDC1000 richiede pochi componenti esterni ma la scelta del condensatore di filtro connesso tra i pin CFA e CFB risulta critica. Il valore del condensatore deve essere più piccolo possibile per garantire buone prestazioni ma grande abbastanza per non saturare il filtro attivo cui è connesso. Il condensatore dipende inoltre dalla costante di tempo del sensore LC.
In pratica, viene suggerita nel datasheet una procedura di selezione del valore che offre il compromesso ottimale, partendo da valori di partenza definiti in funzione della tecnologia di realizzazione della induttanza del sensore, verificata sperimentalmente nel proprio circuito applicativo. La qualità del condensatore di filtro è anche molto importante. Esso deve garantire una bassa perdita, stabilità in temperatura e l’assenza di fenomeni piezoelettrici. Questi ultimi, in particolare, accoppierebbero direttamente con il segnale d’uscita variazioni dovute a sollecitazioni meccaniche o vibrazioni, traducendosi in rumore sovrapposto alla misura. Sono consigliati condensatori C0G (NP0) con tensione di lavoro sovradimensionata. L’interfaccia digitale si compone di una linea di comunicazione SPI slave, ovvero non in grado di iniziare uno scambio dati, ed un pin di uscita utilizzabile per generare interrupt verso il microcontrollore di gestione. La SPI è usata per configurare il dispositivo attraverso i vari registri di cui dispone, brevemente introdotti in precedenza.
Una misura è iniziata leggendo il registro 0x21 (Proximity Data LSB) ed attendendo poi l’attivazione del flag “DataReady” nel registro 0x20 (Status). Il pin di interrupt (INTB) consente di operare secondo tre modalità. La prima è chiamata “Comparator Mode”. INTB è attivato quando il valore del registro “proximity” supera il valore programmato in Threshold-High e disattivato quando proximity scende sotto il valore di Threshold-Low. LDC1000 lavora in questo modo, sostanzialmente come interruttore di prossimità con isteresi programmabile. In Wake-Up mode INTB viene attivato quando il valore del registro “proximity” supera il valore programmato in Threshold-High e disattivato quando il modo Wake-Up viene disabilitato scrivendo nel registro di controllo. In questo modo si può svegliare una CPU da sleep mode, modalità usata per risparmiare energia. Infine, troviamo il modo di default, DRDYB, in cui INTB è attivato ogni volta che il risultato di una nuova conversione è disponibile.
Per familiarizzare con LDC1000 è disponibile una scheda di valutazione (vedi riferimento 4) formata da tre sezioni separabili. Come già accennato, una sezione consente di ricevere un LDC1000 saldato, una sezione contiene un sensore LC realizzato su PCB e la terza sezione contiene un microcontrollore Texas MPS430, completa di interfaccia USB. Quest’ultima consente di collegare la scheda di prova ad un PC dotato di interfaccia utente che consente la configurazione di LDC1000 e la gestione grafica dei dati acquisiti (vedi Figura 6).
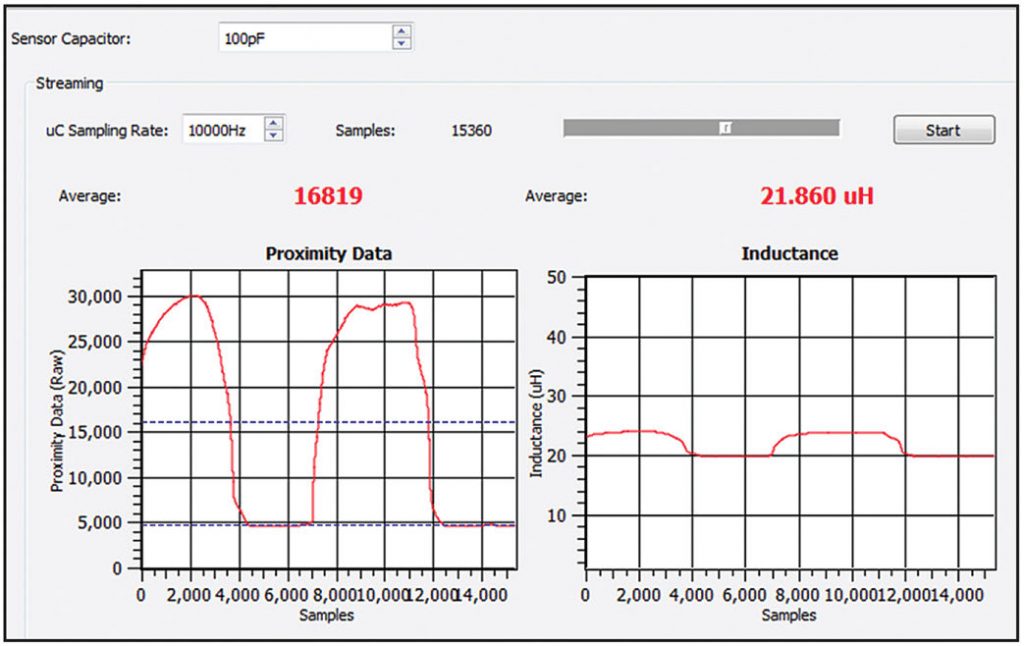
Figura 6: Graphical User Interface su PC per l’attivazione della scheda di valutazione
Separando la sezione sensore del PCB è possibile collegare il proprio sensore, ottimizzarne i parametri e mettere a punto il software di gestione. La documentazione completa del PCB e del firmware residente sul microcontrollore sono forniti attraverso il sito web dedicato (Rif. 5). L’installazione PC comprende una libreria di gestione MATLAB ed una LabView. La scheda di valutazione è quindi anche una possibile base di partenza per la realizzazione del proprio prototipo. La progettazione del sistema è inoltre assistita da uno strumento online WEBENCH Inductive Sensing Designer. Questo permette di semplificare la progettazione della bobina sensore e di generare automaticamente la configurazione per LDC1000. L’Application Note in Rif.6 è la risorsa raccomandata da Texas come piattaforma per lo sviluppo di applicazioni con LDC1000 e MPS430. Un’ampia libreria firmware e alcuni programmi esempio completi, vengono resi disponibili per ridurre lo sforzo di implementazione della propria applicazione.