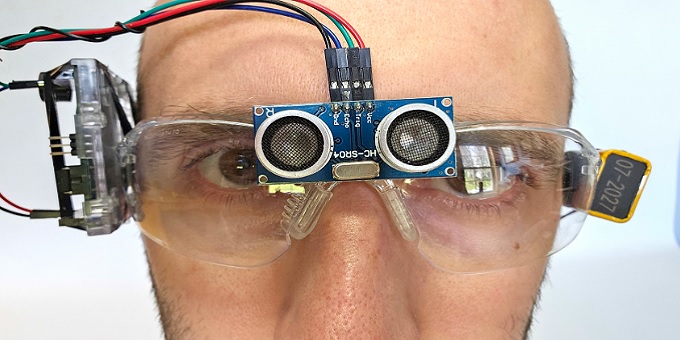
In questo articolo, descriveremo passo-passo il progetto di un semplice dispositivo anticollisione che può essere utilizzato sia da persone ipovedenti che da chi si trovi in zone prive di illuminazione e voglia percorrerle in sicurezza. Il circuito del dispositivo anticollisione è costituito da un microcontrollore Raspberry Pi Pico W e da un sensore ad ultrasuoni HC-SR04.
Introduzione
La scheda di sviluppo Raspberry Pi Pico W e il sensore a ultrasuoni HC-SR04 realizzano una semplice ma precisa piattaforma per misurare distanze, rilevare oggetti e creare applicazioni IoT di automazione intelligenti. In questo progetto vedremo come interfacciare Raspberry Pi Pico W con un sensore a ultrasuoni per realizzare un dispositivo indossabile anticollisione. Un sensore a ultrasuoni è dotato di due trasduttori: il trasmettitore e il ricevitore. Il funzionamento del sensore a ultrasuoni è basato sul principio della riflessione delle onde sonore. Le onde ultrasoniche ad alta frequenza (solitamente superiore a 20 kHz) sono emesse dal trasmettitore. Quando queste onde incontrano un ostacolo, rimbalzano su di esso riflettendosi come echi. Il ricevitore del sensore ultrasonico rileva questi echi di ritorno misurando il tempo impiegato dalle onde per tornare indietro verso la sorgente emittente. Conoscendo la velocità del suono nel mezzo (nell'aria, alla temperatura di +20°C, la velocità del suono è di circa 343 m/s) e il sensore può calcolare la distanza dall'ostacolo utilizzando la formula seguente:
Distanza = (Velocità del suono * Tempo di eco) / 2
Ad esempio, alla temperatura ambiente di +20 °C, se il tempo di eco è di 1 s, ovvero il tempo che impiega il segnale per percorrere la distanza fra il sensore e l’ostacolo e tornare indietro dopo aver colpito l’ostacolo, la distanza sarà così calcolata:
Distanza = 343/2 = 171,5 m
L'intero processo avviene rapidamente e quindi il sensore è in grado di misurare le distanze in tempo reale.
L’esempio sopra riportato è puramente teorico in quanto la massima distanza misurabile da un sensore ad ultrasuoni dipende dalla portata massima del sensore utilizzato.
Il sensore a ultrasuoni HC-SR04
Il modulo a ultrasuoni HC-SR04 utilizzato in questo progetto è mostrato in Figura 1. E’ un sensore misuratore di distanza senza contatto in grado di misurare distanze da 2 cm a 400 cm con una precisione di circa 3 mm.

Figura 1: Sensore a ultrasuoni HC-SR04
Il modulo HC-SR04 integra un trasmettitore a ultrasuoni, un ricevitore e circuiteria di controllo. Il funzionamento dell’HC-SR04 prevede l’invio al pin “Trigger” di un segnale impulsivo che deve essere a livello alto per 10 uS. Il periodo minimo del segnale di “Trigger” deve essere non inferiore a 50 µs. Conseguentemente, il trasmettitore invia un treno di otto impulsi alla frequenza di 40 kHz. Nel contempo il ricevitore controlla se è presente un segnale di ritorno riflesso da un ostacolo colpito dagli impulsi inviati dal trasmettitore. Se il segnale di ritorno è di livello sufficiente, sul pin “Echo” viene generato un impulso che permane a livello alto per un tempo proporzionale al tempo trascorso dall’invio degli impulsi al loro ritorno. Questo tempo viene utilizzato per misurare la distanza di un oggetto dal sensore ad ultrasuoni. La distanza misurata si ricava dalla seguente formula:
Distanza = (durata del livello alto di Echo × velocità del suono (343 m/s)) / 2
In Figura 2 viene riportato il diagramma di temporizzazione del processo di trasmissione e rilevamento degli impulsi per la misurazione della distanza con l’HC-SR04.
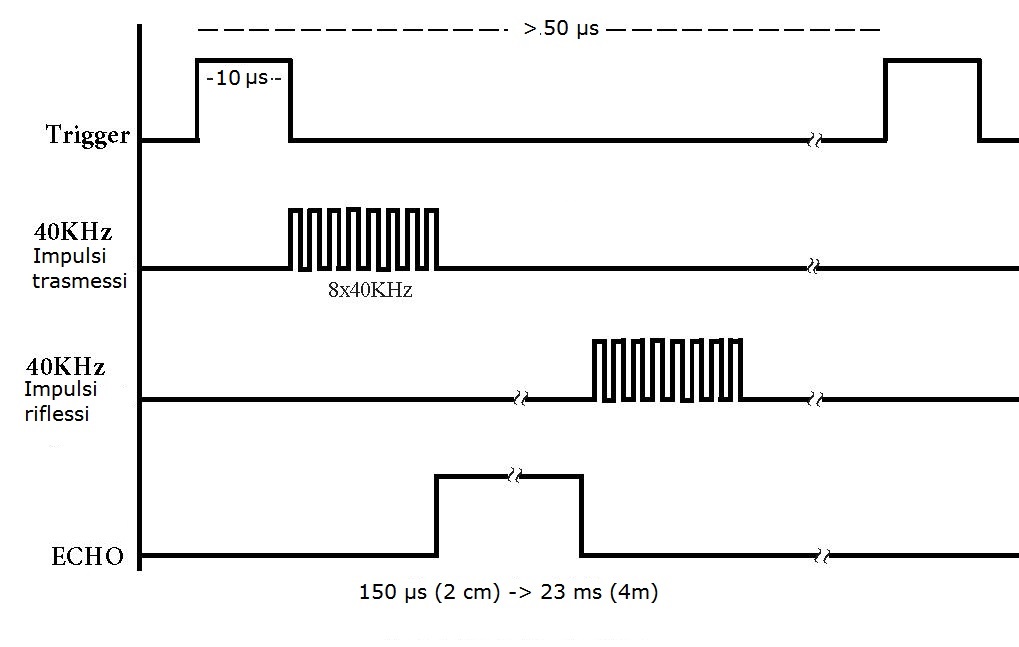
Figura 2: Diagramma di temporizzazione per il rilevamento della distanza
Specifiche tecniche del sensore HC-SR04:
• Tensione di alimentazione: 5 V
• Corrente assorbita: 15mA
• Frequenza del segnale ultrasonico: 40 KHz
• Portata massima: 4 m
• Portata minima: 2 cm
• Angolo di misura: 15°
• Segnale di ingresso di trigger: impulso TTL a livello alto per 10uS
• Periodo del segnale di trigger: >50 µs
• Segnale di uscita di eco: impulso TTL a livello alto di durata in funzione della distanza dell’oggetto misurata, da 150 µs (2 cm) a 23 ms (4 m). Se non viene rilevato alcun ostacolo entro i 4 m, l’impulso ha una durata di circa 38 ms.
Seguendo il diagramma di temporizzazione di Figura 2, in pratica, il pin d’ingresso “Trigger”, mediante l’applicazione di un impulso TTL, deve essere portato dal livello basso al livello alto per 10 us per abilitare il trasmettitore ad inviare nell’ambiente un segnale ultrasonico. Conseguentemente alla ricezione degli impulsi riflessi da un oggetto, il pin di uscita “Echo” dal livello basso si porterà a livello alto e vi resterà per un tempo proporzionale al tempo di percorrenza degli impulsi trasmessi verso l’oggetto, sommato al tempo di percorrenza degli impulsi riflessi dall’oggetto verso il ricevitore del sensore di distanza. La durata del livello alto di “Echo” può variare da 150 µs corrispondente ad una distanza di 2 cm, fino a 23 ms corrispondente ad una distanza di 4 m. Dalle specifiche del sensore HC-SR04, al pin “Trigger” può essere applicato un impulso TTL dopo un tempo superiore a 50 µs dall’applicazione del precedente impulso.
La scheda Raspberry Pi Pico W
Raspberry Pi Pico W è una piattaforma di sviluppo flessibile e potente, ma economica, dotata di microcontrollore RP2040 e di un'interfaccia wireless a 2,4 GHz. Ha una circuiteria esterna minima ma flessibile per supportare il chip RP2040, ed è costituita da una memoria flash, cristalli ceramici SMD ultra miniaturizzati Abracon ABM8-272-T3, alimentatori e disaccoppiamento e connettore USB. La maggior parte dei pin del microcontrollore RP2040 è collegata ai pin I/O utente disposti sul bordo sinistro e destro della scheda. Quattro I/O dell'RP2040 sono utilizzati per funzioni interne: il pilotaggio di un LED, controllo dell'alimentazione dell'alimentatore switching RT6154 integrato e per il rilevamento delle tensioni di sistema.
L'interfaccia wireless a 2,4 GHz integrata nella scheda Pico W utilizza il chip combo Wi-Fi 4 (802.11n) e Bluetooth 5.4 Infineon CYW43439. L'antenna è integrata nella scheda. L'interfaccia wireless comunica con l'RP2040 tramite SPI. La scheda Raspberry Pi Pico W è stata progettata per utilizzare connettori dei pin saldati con passo 2,54 mm, oppure per essere assemblata come "modulo" a montaggio superficiale, poiché anche i pin I/O utente sono previsti. Sono presenti anche piazzole SMT sotto il connettore USB e il pulsante BOOTSEL, che consentono l'accesso a segnali. La Figura 3 mostra il layout della scheda Raspberry Pi Pico W.

Figura 3: Scheda Raspberry Pi Pico W
La Figura 4 riporta la numerazione e la funzione di ogni pin della scheda.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2896 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Supercondensatori ibridi: l’alternativa alle batterie agli ioni di litio

Automazione e robotica per la pulizia degli oceani
Progetto di una console Bluetooth di videogiochi retrò con Arduino e HC-05

Progetto di un sistema hacker di intrusione al CAN-BUS di un veicolo con Arduino e la scheda CAN-BUS Shield V2
Progetto di un dispositivo di controllo di un accesso di sicurezza con RFID e Arduino – Parte 3
