Il precedente articolo “Progetto di un robot di Telepresenza con l’ESP32-CAM - Parte 3” lo abbiamo dedicato al software del nostro robot di telepresenza, ovvero abbiamo creato e salvato lo sketch con il codice di gestione del robot e ne abbiamo descritto alcune funzioni. In questo articolo programmeremo la scheda di sviluppo ESP32-CAM, realizzeremo il prototipo della scheda di controllo e la installeremo sullo chassis del robot. Infine, collauderemo e vedremo il robot in azione controllandolo con uno smartphone, tablet o computer connesso in rete e sul relativo display vedremo il video in streaming ripreso dalla videocamera dell'ESP32-CAM installata sul robot.
Programmazione della scheda di sviluppo ESP32-CAM
La scheda di sviluppo ESP32-CAM non dispone di un’interfaccia USB ma solo di un’interfaccia UART, pertanto, per programmare la scheda con il nostro computer occorre utilizzare un dispositivo esterno convertitore seriale USB-UART, come il convertitore USB-UART CH340 mostrato in Figura 1 che utilizzeremo.

Figura 1: Convertitore USB-UART CH340
Per comunicare con il CH340 è necessario installare nel computer il relativo driver. Scaricate il driver dal sito http://www.wch.cn/download/CH341SER_ZIP.html per Windows, dal sito http://www.wch.cn/download/CH341SER_MAC_ZIP.html per Mac. Decomprimete il file ZIP e, per Windows, installatelo eseguendo "SETUP.EXE" nella cartella "CH341SER". Per Mac, si seguano le istruzioni di installazione fornite con il pacchetto del driver. Se l’installazione è andata a buon fine, nelle periferiche di comunicazione del vostro computer troverete assegnata al CH340 una porta COM su Windows o "ttyUSB" su Mac.
Installato il driver, collegate la scheda convertitore seriale USB-UART CH340 ad una porta USB del PC e i pin della scheda ESP32-CAM ai pin del CH340 come elencato di seguito:
ESP32-CAM CH340
GND GND
5V VCC (5V)
U0R TX
U0T RX
GPIO0 GND
Aprite l’IDE di Arduino e lo sketch “Robot_di_Telepresenza” che avevate salvato nella precedente puntata “Progetto di un robot di Telepresenza con l’ESP32-CAM - Parte 3”. Per caricare il codice nell’ESP32-CAM utilizziamo l’IDE di Arduino. Quindi, con Strumenti -> Scheda selezionate la scheda “AI-Thinker ESP32-CAM”, poi con Strumenti -> Porta selezioniamo la porta di comunicazione a cui è collegata l'ESP32-CAM. Predisponete la scheda ESP32-CAM in modalità di programmazione collegando a GND il pin GPIO0 e premete il pulsante RESET della scheda ESP32-CAM. Cliccate su “Carica” per iniziare l’upload del codice. Terminato il caricamento con successo, scollegate dal pin GND il pin GPIO0 della scheda. Aprite il monitor seriale impostato a 115200 e cliccate sul pulsante di reset della scheda per avviare il programma. Sul monitor seriale vedrete l’indirizzo IP assegnato alla scheda ESP32-CAM, come mostrato in Figura 2. Annotate questo indirizzo IP che utilizzeremo in seguito.
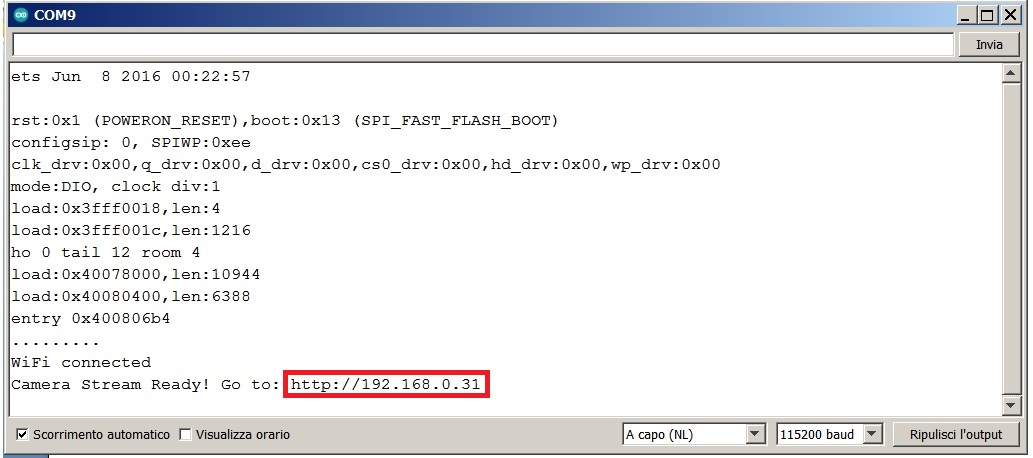
Figura 2: Indirizzo IP della scheda ESP32-CAM
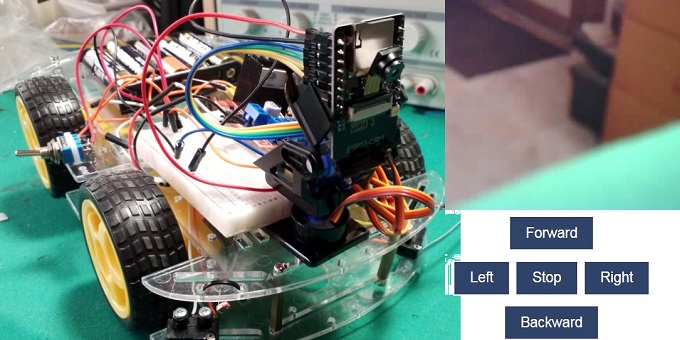
Copiate l’indirizzo IP mostrato nel monitor seriale nella barra degli indirizzi del browser di un vostro dispositivo connesso alla rete locale Wi-Fi e avviatelo. Vedrete sul display le immagini riprese dalla videocamera della scheda ESP32-CAM e il pannello di controllo con i cinque pulsanti.
Realizzazione del prototipo della scheda di controllo
Lasciate collegato il convertitore CH340 alla scheda ESP32-CAM scollegando solo il pin collegato al pin 5V della scheda ESP32-CAM, il CH340 ci occorrerà ancora. Su una breadboard sperimentale posizionate i moduli L298N e ESP32-CAM, una morsettiera a due morsetti e uno switch. Eseguite con dei jumper i collegamenti dei componenti seguendo lo schema elettrico della scheda di controllo del robot riportata nella Figura 3.
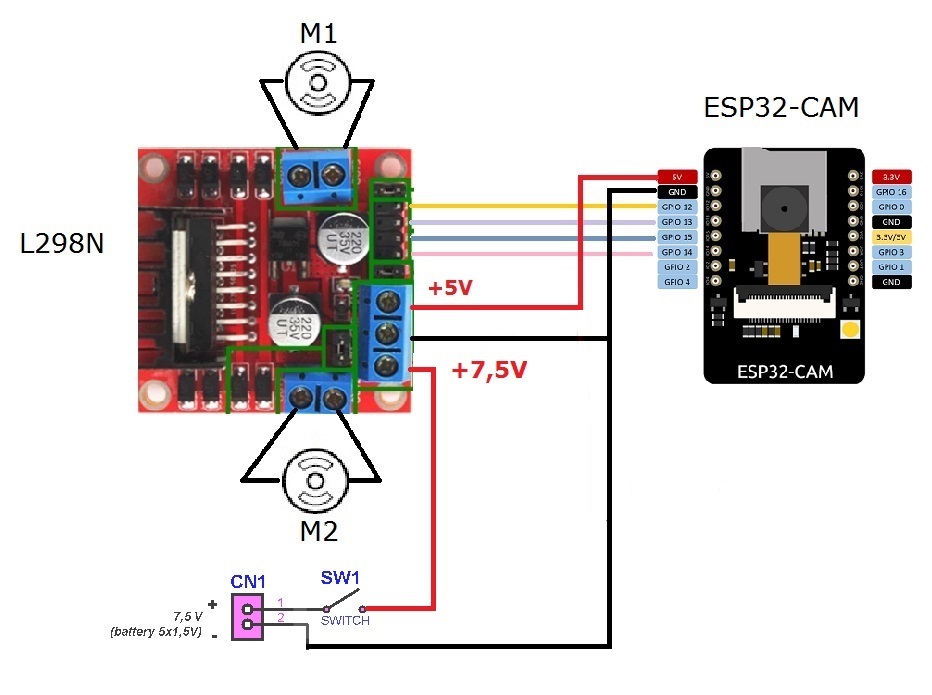
Figura 3: Schema elettrico della scheda di controllo del robot
Realizzate prima i collegamenti del modulo L298N con la scheda ESP32-CAM. Completati i collegamenti, posizionate la scheda di controllo e il pacco batterie (contenente le cinque batterie AA da 1,5V) sulla piattaforma superiore dello chassis del robot, collegate i due motori presenti sulla piattaforma inferiore alle due rispettive morsettiere del modulo L298N. Infine, mantenendo aperto lo switch SW1, collegate alla morsettiera CN1 i conduttori rosso (+) e nero (-) del pacco batterie rispettando le polarità indicate nello schema.
Collegamento di un’antenna esterna all’ESP32-CAM
Prima di procedere al completamento dell’assemblaggio del robot, una sintetica trattazione riteniamo sia utile in questo progetto, ma anche per altri progetti con l’ESP32-CAM, riguardo al collegamento e utilizzo di un’antenna esterna all’ESP32-CAM. L'ESP32-CAM è dotata di un'antenna Wi-Fi integrata, ma ha anche un connettore IPEX da utilizzare per collegare un'antenna esterna per consentire di estendere una maggiore portata del segnale a radio frequenza Wi-Fi. L'utilizzo di un'antenna esterna può risolvere i problemi relativi alla qualità dello streaming video fornito dal server Web, come il blocco delle immagini e problemi di connettività. In questa parte dell’articolo vedremo come collegare e utilizzare un'antenna esterna con l'ESP32-CAM. In Figura 4 l’ESP32-CAM con un’antenna esterna collegata al connettore IPEX.

Figura 4: L’ESP32-CAM con antenna esterna
Nel nostro progetto abbiamo scelto di utilizzare una scheda di sviluppo ESP32-CAM AI Thinker, pertanto, di seguito spiegheremo come collegarla ad un'antenna esterna. Accanto al connettore IPEX ci sono tre quadratini bianchi (pad) disposti a formare la lettera V ruotata di 90° a destra (<) con la posizione centrale comune. La posizione di un resistore da 0 ohm posto all’interno di questa “<” determina la selezione dell'antenna integrata o esterna. Per utilizzare il connettore IPEX con un'antenna esterna, il resistore deve trovarsi nella posizione inferiore della “<”, come mostrato in Figura 5a. Per utilizzare l'antenna integrata, il resistore deve essere nella posizione superiore, come indicato in Figura 5b.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2039 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:

Alimentare la rete del futuro: come l’elettronica di potenza sta trasformando le reti intelligenti in realtà
Protocolli di Comunicazione per l’Internet delle Cose (IoT)

IOTA: come pubblicare transazioni sul Tangle con il Raspberry Pi
EOS-Book @6 L’arte dello sbroglio dei circuiti stampati (tutorial avanzato) PCB ART2
L’Intelligenza Artificiale diventa quantistica
