Questo articolo tecnico rappresenta la parte successiva alla Parte 1 della serie di articoli "Uso dell’unità CTMU nei PIC" per la Rubrica Firmware Reload di Elettronica Open Source.
MISURA DI TEMPO DI PRECISIONE
Numerose applicazioni si basano sulla misura di precisi intervalli di tempo. Utilizzando i pin destinati a rilevare gradini di tensione (CTEDn) si possono realizzare misure di tempo della precisione del nanosecondo. Caricando il condensatore di Sample and Hold nell’intervallo di tempo fra i fronti di salita dei pin si ottiene una tensione direttamente proporzionale a tale intervallo di tempo.
STRUMENTI E METODOLOGIE
La Figura 1 mostra uno schema per tale misura: essa può avvenire in modo asincrono rispetto al clock del microcontrollore.
- Misura di distanza (ultrasuoni e laser)
La CTMU è usata per misurare il tempo trascorso tra impulso trasmesso e segnale riflesso. Questo può essere usato per determinare una distanza con la risoluzione di qualche centimetro. - Controllo di guida adattativo
Come estensione del caso precedente, l’ACC, controllo adattativo di guida, mantiene una distanza costante tra i veicoli in movimento. La CTMU permette soluzioni basate su RF o su laser. - Frenata sicura
È un’applicazione che si può abbinare all’ACC: essa attiva automaticamente i freni quando un oggetto di fronte si avvicina troppo. Tale sistema può essere utilizzato anche indipendentemente dall’ACC. - Misura tramite cavo coassiale
La CTMU può essere usata per realizzare uno strumento in grado di rilevare impulsi riflessi da discontinuità in una linea di trasmissione costituita da un cavo coassiale aperto o non adattato. Come mostrato in Figura 2, quando un impulso di tensione è immesso nel nodo A, in un cavo aperto o non adattato si avrà una riflessione e il segnale riflesso può essere rilevato dopo un tempo proporzionale al doppio della distanza tra nodo d’ingresso e discontinuità. Un cavo adattato non rifletterà impulsi. - Misura di propagazioni a ultrasuoni
Come strumento che misura distanze, la CTMU misura l’intervallo di tempo tra impulso trasmesso e riflesso. In questa applicazione, la differenza temporale tra segnali rilevati da sensori fissi dipende dalla velocità di propagazione nel mezzo. In Figura 3 si mostra uno schema di una soluzione in cui il microcontrollore invia e riceve impulsi dai trasduttori; tali impulsi sono inviati ai moduli Input Capture e Output Compare. La CTMU usa tali segnali per stabilire la velocità. - Interfaccia per i segnali GPS
La localizzazione GPS si basa su segnali inviati a, e trasmessi da una serie di satelliti a dispositivi a terra. La CTMU può essere usata per rilevare la differenza temporale tra segnali inviati e trasmessi ai singoli satelliti per determinare la posizione a terra. La precisione della misura temporale fornita dalla CTMU diventa quindi importante, in relazione al sistema satellitare, nel determinare con precisione la posizione a terra.
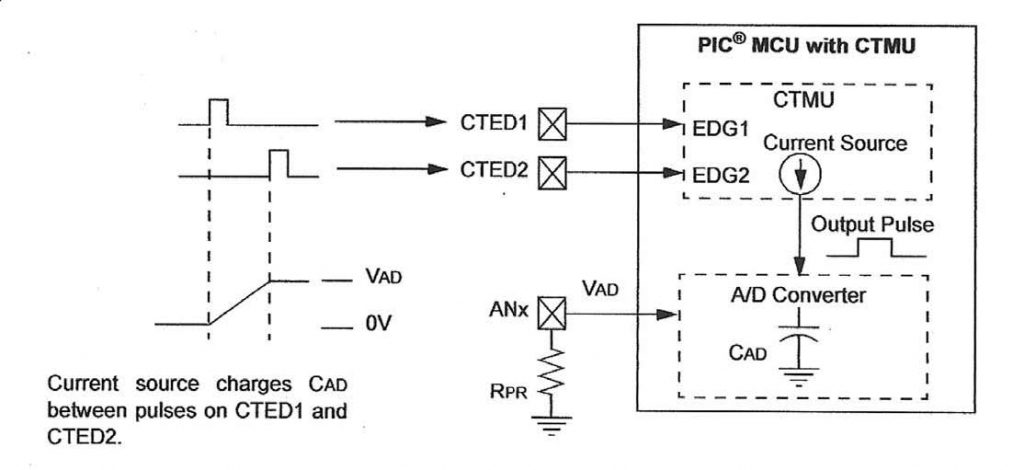
Figura 1: Misura di tempo tramite CTMU
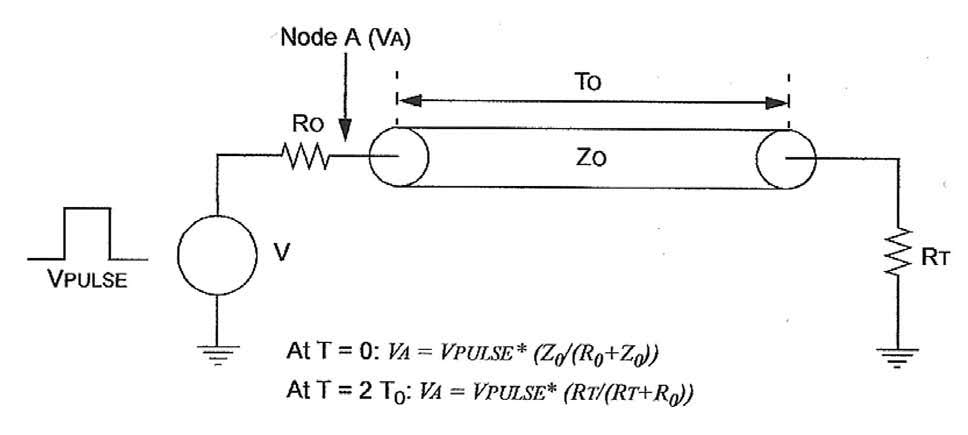
Figura 2: Sistema di creazione e misura di intervalli di tempo tra impulsi generati e riflessi
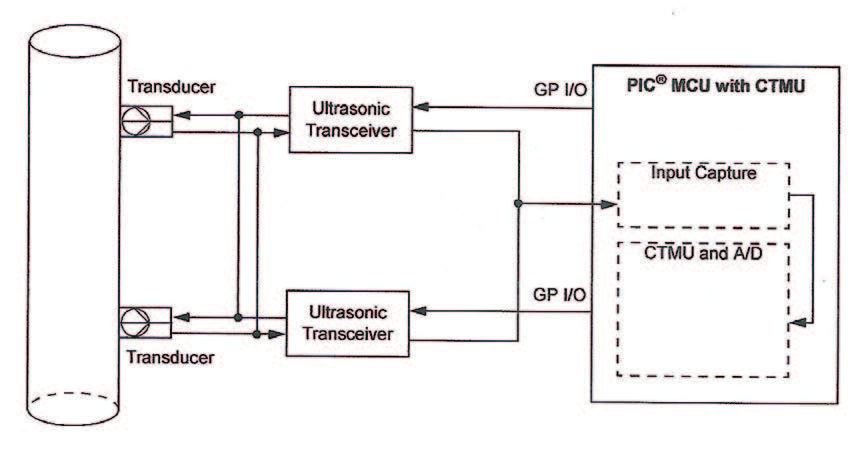
Figura 3: Sistema di misura di propagazioni di ultrasuoni
- Larghezza d’impulso/decodifica mediante duty cycle
La CTMU può misurare con un adeguato livello di precisione la larghezza di singoli impulsi presenti all’interno di una serie. Se la serie è stata modulata in PWM, la CTMU si può usare per demodularla e ritrovare l’informazione digitale. Tale tecnica trova applicazione in molti usi, come nei controlli a infrarossi. - Rilevamento e decodifica DTMF
Gli stessi principi che si usano per decodificare una serie di impulsi modulati in larghezza si possono usare nelle applicazioni DTMF. Misurando le larghezze degli impulsi del segnale ricavato è possibile determinare quali delle due frequenze è stata usata e dunque quale codice è stato usato. - Misura di frequenze
Misurando i fronti di salita di un segnale periodico di lunghezza d’onda costante si può trovarne la frequenza; questo rende la CTMU un mezzo poco costoso per le applicazioni che richiedono una misura di frequenza. - Decoder per encoder ottici
La CTMU può leggere serie di impulsi provenienti per esempio dalle tre uscite di un decoder ottico e determinare sfasamenti tra di loro. Da questi dati si può ricavare velocità e direzione di rotazione. - Giroscopi ottici
Questi dispositivi misurano cambiamenti nella posizione misurando le differenze di fase tra due fasci luminosi che si propagano in direzioni opposte in fibre ottiche. Rilevando i fronti di entrambi i segnali e comparandoli a quelli delle sorgenti che li hanno creati, la CTMU si può usare per calcolare lo sfasamento e perciò un eventuale moto relativo nel dispositivo.