Conosciamo i recenti sviluppi nel settore della robotica per lo sviluppo di sciami di automi con comportamento collettivo.
Si rimane sempre colpiti nell'osservare stormi di uccelli o banchi di pesci come quelli in figura sopra che presentano un comportamento collettivo. Il comportamento collettivo è il risultato di una azione coordinata da parte dei singoli elementi di un gruppo a seguito di un evento. Per esempio, come in figura sopra, il sub che si avvicina al banco di pesci fa si che il banco si allontani uniformemente da lui, spesso infatti tale tipo di comportamento nel mondo animale viene associato a meccanismi di difesa. In sostanza ogni elemento del gruppo comunica con il vicino ed eventuali pericoli vengono segnalati a tutti. In tal modo all'interno del gruppo si reagisce seguendo le direttive di un leader, che può essere il primo elemento del gruppo ad aver ravvisato il pericolo prendendo per primo provvedimenti per la difesa.
Nel settore della robotica c'è un grande interesse per questo tipo di comportamento con l'obbiettivo di riprodurlo con automi appositamente pensati. La parte più complessa della ricerca risiede nello sviluppo di algoritmi atti a riprodurre comportamenti collettivi adatti per gestire in modo sensato a specifiche situazioni. Spesso tali algoritmi per problemi legati ai costi di sviluppo di prototipi hardware sono verificati con simulazioni software che molto spesso non riescono a rendere bene l'idea dell'effettiva qualità della soluzione proposta. Recentemente un gruppo di ricercatori dell'università di Harvard ha messo a punto un prototipo di automa dai costi estremamente ridotti che potrebbe consentire con spese ridotte di verificare nuovi algoritmi per il comportamento collettivo.
L'immagine sottostante mostra il prototipo dell'automa chiamato killbot (nome tipicamente usato nel settore fantascientifico per indicare gli automi sviluppati per uccidere).
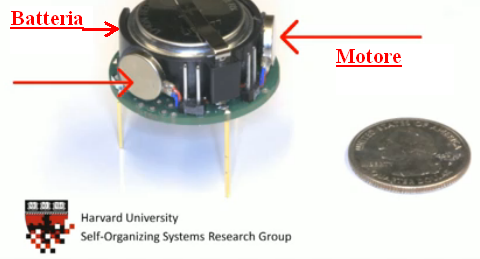
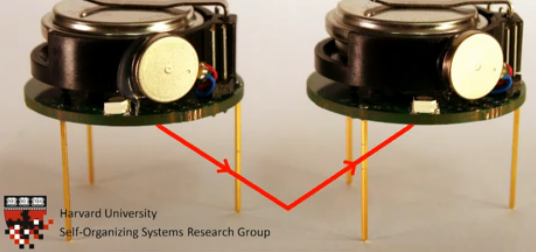
La batteria ricaribabili fornisce una autonomia di tre ore, i due motori consentono al killbot di ruotare in due sensi diversi e di procedere in direzione orizzontale. Un ricetrasmettitore posto sulla parte inferiore consente di mettere in comunicazione killbot vicini sfruttando la riflessione dei segnali dal terreno come mostrato in figura sotto.
Il programma di gestione viene memorizzato sulla PIC di ogni killbot che da qual momento diventa operativo, riceve segnali ed interagisce con gli altri elementi del gruppo.
Una descrizione del killbot è fornita nel video sottostante
Mentre potete vedere i killbot in azione nel video sotto
Quello presentato sopra non è il solo esempio di automa collettivo. Infatti diversi altri modelli di automi per comportamenti collettivi sono in fase di studio. Un ricercatore italiano che lavora al Polytechnic Institute of New York University studia un prototipo di automa che funga da leader per un branco di creature viventi. L'idea è quella di creare un automa a forma di pesce che possa guidare banchi di pesci in situazioni di pericolo per ovviare a problemi derivanti dall'interazione con l'uomo a cui non sempre i pesci sono pronti, come ad esempio l'inquinamento del mare a seguito di catastrofi ecologiche come è accaduto di recente in Giappone.
Questo settore di ricerca è in forte crescita e chissà, forse un giorno anche noi dovremo difenderci dai killbot ma speriamo di farlo meglio del comandante Zapp Brannigan nel video sotto tratto da Futurama...



La seconda generazione di pesce robot sviluppato nel laboratorio di Maurizio Porfiri (il ricercatore italiano di Polytechnic Institute of New York University)
Michael Crichton aveva già ipotizzato uno scenario simile in un suo libro pubblicato nel 2002.
http://it.wikipedia.org/wiki/Preda_%28romanzo%29
Anche lui ha di questi timori. Ma d’altra parte la sua è ricerca pura