Un accelerometro è un dispositivo inerziale per la misura delle accelerazioni lineari. Un dispositivo inerziale è in grado di fornire una misurazione senza bisogno di un riferimento esterno, a parte le condizioni iniziali fornite allo start-up, come ad esempio la posizione iniziale - ma solo se questo è richiesto dalla particolare applicazione.
Una categoria particolare è quella degli accelerometri MEMS (Micro Electro-Mechanical Systems), dei dispositivi che integrano in un solo chip di silicio sia le parti meccaniche che i circuiti elettronici di condizionamento e controllo. Tra i maggiori produttori di accelerometri ed altri sensori MEMS troviamo Analog Devices, e ST Microelectronics. Gli accelerometri ed altri tipi di sensori basati sulla tecnologia MEMS, come i giroscopi MEMS - capaci di rilevare velocità angolari - stanno conquistando campi di applicazioni sempre più ampi che vanno dagli apparati consumer - come smartphone evoluti e console di gioco - agli apparati di controllo industriale e biomedicali. Gli accelerometri MEMS permettono di eseguire diversi tipi di misurazioni, sia direttamente che tramite una successiva elaborazione.
» Misurazione della velocità e della posizione:
- la velocità è ricavata come integrale dell’accelerazione: il risultato è a meno di una costante corrispondente alla velocità iniziale.
- La posizione è ricavata come integrale doppio dell’accelerazione, ovvero integrando la velocità se calcolata in precedenza; in questo caso è necessario conoscere le condizioni iniziali di velocità e posizione.
» Misurazione di vibrazioni e di impatti (shock).
» Misurazione dell’orientamento: poiché gli accelerometri sono sensibili alla forza di gravità, possono essere utilizzati per rilevare l’inclinazione (tilt) del dispositivo.
I campi applicativi dei MEMS sono numerosi e probabilmente se ne aggiungeranno in futuro molti altri. Attualmente le applicazioni più diffuse riguardano:
» dispositivi di input per Realtà Virtuale e console di gioco;
» apparati mobili come PDA, smartphone,
» lettori multimediali;
» antifurti per laptop e simili;
» dispositivi anti caduta per HDD;
» motion sensing in Robotica;
» apparati biomedicali;
» rilevazione di urti nei sistemi Airbag.
Controllo delle condizioni di macchine elettromeccaniche.
Caratteristiche e utilizzi degli accelerometri MEMS
Un MEMS è un dispositivo elettromeccanico realizzato con le stesse tecnologie usate per la fabbricazione dei chip: fotolitografia, incisione e impiantazione ionica. Ciò permette di realizzare dispositivi di dimensioni ridottissime - dell’ordine dei 10 µm di lato - con una massa sensibile di meno di 1 µg, che sono utilizzabili come sensori di movimento inerziali. Naturalmente, oltre al dispositivo meccanico è possibile integrare sullo stesso chip i circuiti elettronici di controllo, d’acquisizione e di condizionamento del segnale, sia analogici sia digitali. Il sensore MEMS vero e proprio è costituito da due condensatori collegati in un half-bridge: un’accelerazione muove la massa sensibile (che costituisce una delle armature dei condensatori) facendo variare la capacità dei due condensatori. Le capacità di questi condensatori è dell’ordine del pF, mentre la massima variazione di capacità è dell’ordine di 10-100 fF. Lo sbilanciamento dell’half-bridge può essere misurato integrando la carica accumulata dai condensatori quando questi sono sottoposti a dei brevi impulsi di tensione. Gli accelerometri MEMS possiedono una serie di parametri specifici che saranno approfonditi di seguito. Sensibilità (sensitivity): è la misura del guadagno del sensore sottoposto ad un’accelerazione di 1g. Può essere determinata sperimentalmente con facilità ruotando l’asse che ci interessa del MEMS a -90° (cioé verso terra) e rilevando il valore in uscita, quindi ruotandolo a 90°, vale a dire verso il cielo, e rilevando il nuovo valore in uscita. Abbiamo così applicato un range di accelerazione di 2g, da cui possiamo calcolare la sensibilità del MEMS come ½ (Vout90°-Vout-90°) mV/g Questo parametro varia leggermente in funzione della temperatura. Zero-g bias: è il livello di tensione in uscita dal sensore quando è applicata un’accelerazione nulla (0 g).
Può essere determinata, per gli assi X ed Y, ponendo il sensore su di un piano orizzontale. Il valore nominale è generalmente pari a ½Vdd, vale a dire circa 1.65 V per un sensore alimentato a 3.3V. Lo spostamento dal valore nominale è denominato zero-g offset, ed è importante che sia il più piccolo possibile per alcuni tipi di applicazione, come vedremo. Quest’offset varia anche leggermente in funzione della temperatura. Larghezza di banda: nel caso degli accelerometri con risposta in DC, come gli accelerometri MEMS, corrisponde alla frequenza massima dell’accelerazione da misurare. Generalmente è consigliabile diminuire la larghezza di banda del sensore al minimo possibile, in funzione della particolare applicazione, utilizzando un filtro passa-basso in uscita. È anche importante che la frequenza di taglio di questo filtro sia ben inferiore alla frequenza di risonanza del sensore, ricavabile dai dati caratteristici forniti dal produttore. Rumore: il rumore prodotto dai sensori MEMS è un rumore bianco con distribuzione gaussiana. Questo comporta che è possibile diminuire il rumore limitando la larghezza di banda del sensore. Risoluzione: la minima accelerazione che è possibile rilevare. Il rumore ha un impatto importante sulla risoluzione del sensore ed è quindi importante assicurarsi che un dato modello sia adatto all’applicazione che si vuole realizzare. Per fare un esempio, il valore rilevato da un sensore MEMS avente un rumore tipico di 50 µg/√(Hz), se la sua banda viene limitata a 100 Hz, avrà una risoluzione di 2 mg, corrispondenti ad una variazione dell’inclinazione di 0.12°. Si noti che nel calcolo è stato considerato il rumore picco-picco, con un valore stimato pari a 4 volte il rumore RMS. Un altro fattore che determina la risoluzione è il convertitore A/D, che può essere incluso nello stesso chip, nel caso di sensori digitali, o esterno. Ad esempio, un convertitore A/D da 10 bit funzionante con una Vref = 3.3 V, nel caso di un MEMS con sensibilità di 660 mV/g, avrà una risoluzione di 4.88 mg/bit corrispondente a 0.28°/bit.
Rilevazione di velocità e posizione con i MEMS
Un sensore MEMS possiede uno o più assi lungo i quali può rilevare le accelerazioni, ad esempio un sensore a 3 assi possiederà una terna di assi ortogonali fra loro, come si può vedere in figura 1.
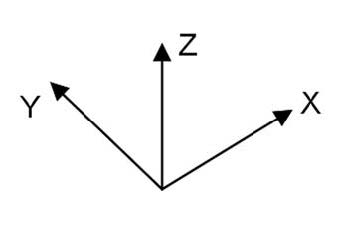
Figura 1: disposizione degli assi di un accelerometro
MEMS a 3 assi.
Dato che l’accelerazione è un vettore, l’accelerazione misurata è pari al prodotto scalare della stessa nella direzione di ciascun asse di rilevazione del MEMS: ad esempio l’accelerazione A avrà una componente lungo l’asse X del sensore pari a Ax = A*cos(θ) dove θ è l’angolo tra A e l’asse X, come si può vedere in figura 2.
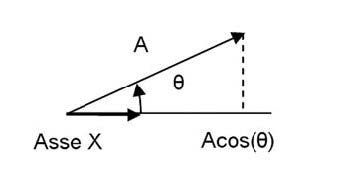
Figura 2: componente dell’accelerazione A nella
direzione di un asse del sensore
La misurazione di velocità e posizione come già detto è eseguita integrando una volta l’accelerazione misurata per ottenere la velocità o due volte per ottenere la posizione. Se è necessario conoscere la posizione assoluta deve essere nota anche la posizione iniziale oltre alla velocità iniziale. L’equazione per il calcolo della velocità è la seguente
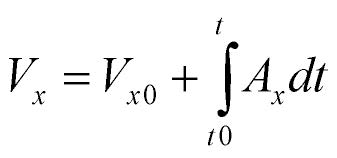
Mentre quella per il calcolo della posizione a partire dalla velocità è
Per questo tipo di applicazione sono particolarmente importanti la precisione del dispositivo e la stabilità, in quanto ogni variazione dell’offset viene rilevata come se fosse un’accelerazione. Dato che piccole variazioni dell’accelerazione possono portare a grandi variazioni nella velocità/posizione calcolate, è anche necessario che il dispositivo abbia una risoluzione adeguata oltre che un basso rumore. I MEMS rilevano la forza di gravità come se fosse un’accelerazione, pari a 9.81 m/s2 sul livello del mare. Quindi un’inclinazione è rilevata come se fosse un’accelerazione e in definitiva una variazione della posizione. Generalmente si utilizzano dei giroscopi, anch’essi eventualmente realizzati con tecnologia MEMS, per poter discriminare tra un’accelerazione lineare ed una rotazione. Le applicazioni di questo tipo richiedono nel caso più generale 6 gradi di libertà che corrispondono ai 3 assi di accelerazione lineare ed a 3 assi di rotazione: sono quindi necessari 3 accelerometri (o un accelerometro a 3 assi) per rilevare le accelerazioni e 3 giroscopi per rilevare le rotazioni.
Rilevazione di shock meccanici e di vibrazioni
Particolari applicazioni, come quelle nelle quali è necessario discriminare tra semplici accelerazioni ‘normali’ e accelerazioni da impatto, richiedono un’elaborazione sofisticata dei segnali rilevati. Ad esempio è possibile utilizzare un’analisi spettrale dell’accelerazione per riconoscere un determinato pattern. Se la larghezza di banda è limitata (generalmente siamo nell’ordine di poche decine-centinaia di Hz) è possibile implementare una FFT anche su un micro ad 8 bit, purché dotato almeno di un moltiplicatore hardware. Altre applicazioni possibili sono quelle riguardanti la rilevazione di vibrazioni per determinare lo stato di salute di macchinari elettromeccanici come ventole, pompe, ecc... In quest’ambito è necessario tenere conto in particolare della larghezza di banda del sistema e del rumore, il cui impatto come abbiamo visto è inversamente proporzionale alla larghezza di banda.
Rilevazione dell’inclinazione (tilt sensing)
Una delle applicazioni più frequenti degli accelerometri riguarda la rilevazione dell’inclinazione o dell’orientamento. Grazie al fatto che i MEMS sono sensibili alla forza di gravità, è possibile rilevare l’inclinazione intorno ad uno degli assi. In questo caso ci troviamo di fronte al problema opposto rispetto a quello che avevamo evidenziato in precedenza nel caso della misura di velocità: un’accelerazione viene rilevata come se fosse un’inclinazione. Anche in questo caso per poter discriminare tra accelerazione ed inclinazione è possibile utilizzare un giroscopio o più accelerometri disposti correttamente. Ad esempio se disponiamo di un accelerometro a 3 assi possiamo usare a questo scopo l’asse Z. Gli accelerometri possono rilevare il beccheggio (pitch, rotazione attorno all’asse X) ed il rollio (roll, rotazione attorno all’asse Y) ma non l’imbardata (yaw, rotazione attorno all’asse Z) in quanto in questo caso la forza di gravità è ininfluente. In quest’ultimo caso è necessario quindi un giroscopio o più accelerometri con un software adatto. L’inclinazione di uno degli assi dell’accelerometro rispetto all’orizzonte viene rilevata come un’accelerazione pari a
da cui l’inclinazione
valida per θ compreso tra -90° e +90°. In tabella 1 sono riportati i valori in uscita dall’asse X di un MEMS per alcuni valori notevoli dell’inclinazione: notiamo che la sensibilità del MEMS non è un valore costante ma raggiunge un massimo intorno agli 0° d’inclinazione ed un minimo a -90° e +90°.
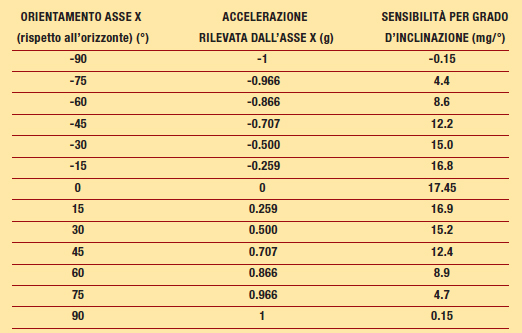
Tabella 1: Accelerazione rilevata e variazione dell’inclinazione.
In pratica ciò lo renderebbe utilizzabile solo per rotazioni comprese tra +-45°, ma combinando i valori rilevati da due assi, come gli assi X e Z, è possibile ottenere una sensibilità costante pari al valore massimo di 17.45 mg/°. Si osservi che i valori così calcolati sono indipendenti dal particolare modello di sensore poiché discendono da calcoli trigonometrici sempre validi. Nella misura dell’inclinazione, sono importanti diversi parametri caratteristici:
» precisione, ripetibilità e bassa variazione dello zero-g bias;
» risoluzione, determinata a sua volta dal rumore.
Un accelerometro MEMS d’esempio: LIS3L02AL
L’accelerometro MEMS che useremo nel nostro esempio, è il LIS3L02AL prodotto da ST Microelectronics. Si tratta di un accelerometro a 3 assi con uscita analogica capace di rilevare accelerazioni comprese tra ±2g. In figura 3 possiamo vedere lo schema a blocchi del componente, mentre in tabella 2 sono riportate le caratteristiche principali di questo componente.
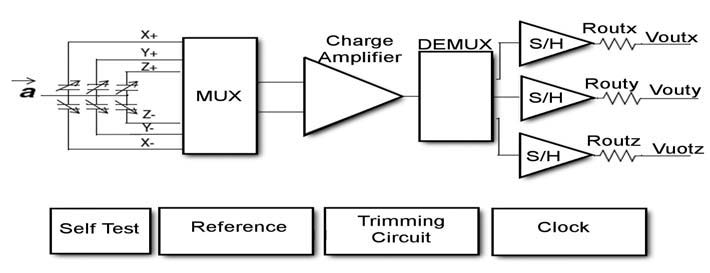
Figura 3: schema a blocchi dell’accelerometro a 3 assi LIS3L02AL
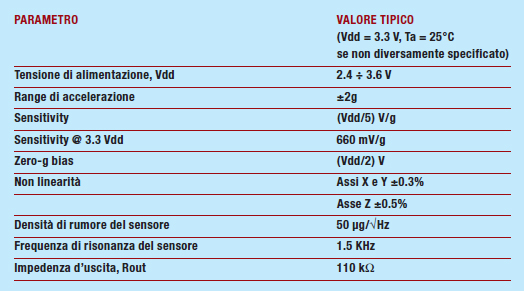
Tabella 2: Caratteristiche principali dell’accelerometro MEMS LIS3L02AL.
Il dispositivo comprende al suo interno i circuiti di pilotaggio dei sensori, l’amplificatore di carica, 3 S&H, un sistema di Self-Test ed altri circuiti di controllo. L’amplificatore di carica opera a 200 KHz, mentre i Sample & Hold campionano la tensione in uscita dall’amplificatore alla frequenza di 66 KHz: l’oversampling serve principalmente a ridurre il rumore. Lo zero-g bias e la sensibilità sono proporzionali alla tensione di alimentazione, quindi questi parametri variano linearmente con le variazioni di questa tensione. Questi stessi parametri sono calibrati in fabbrica ed i valori corrispondenti memorizzati in una struttura non volatile che viene letta all’accensione del dispositivo, per cui non è necessario ricorrere alla sua taratura. Il MEMS LIS3L02AL possiede un circuito di SelfTest mediante il quale è possibile rilevare il corretto funzionamento sia della parte meccanica che elettronica. Questo sistema è costituito essenzialmente da altri due condensatori per ogni asse che fungono questa volta da attuatori: ponendo il pin ST a livello alto, questi condensatori sono caricati generando una forza elettrostatica che induce un’accelerazione aggiuntiva sulla massa sensibile del sensore. L’uscita del sensore sarà quindi data dalla somma algebrica di questa accelerazione con quella esterna, permettendo così di testarlo. I 3 S & H sono collegati alle uscite degli assi X, Y e Z tramite una resistenza che cosituisce parte di un filtro passa-basso. È necessario completare il filtro aggiungendo un condensatore esterno di valore opportuno tra l’uscita e la massa. La frequenza di taglio nominale del filtro sarà data dalla formula seguente
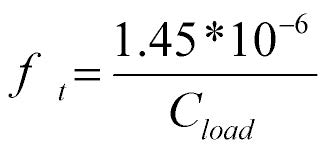
Il valore minimo di Cload è di 1 nF, corrispondente ad una ft = 1.5 KHz, che come risulta dai dati caratteristici corrisponde alla frequenza di risonanza del sensore. In figura 4 sono riportate la disposizione degli assi e le connessioni del dispositivo.
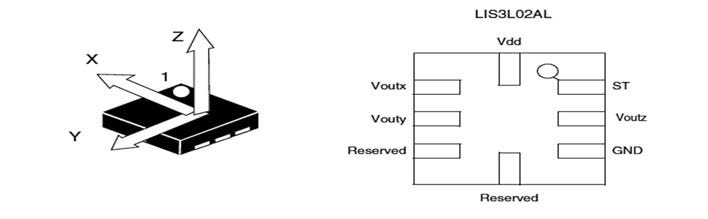
Figura 4: disposizione degli assi e connessioni del MEMS LIS3L02AL (visto dal basso).
Un’applicazione d’esempio: USB HID device con MEMS
Nell’applicazione d’esempio verrà usato un accelerometro MEMS del tipo LIS3L02AL per emulare il comportamento del puntatore di un mouse. Le accelerazioni rilevate dagli assi X ed Y del MEMS saranno acquisite tramite un microcontrollore dotato di interfaccia USB 2.0 Full Speed (12 mb/s). Tramite questa interfaccia il sistema potrà essere collegato al PC che lo rileverà come un dispositivo USB di classe HID (Human Interface Device).
L’hardware del sistema
Con riferimento allo schema elettrico in figura 5, le uscite degli assi X ed Y del sensore MEMS sono collegati a due ingressi del microcontrollore PIC18LF2550 che li convertirà tramite il convertitore A/D a 10 bit integrato.
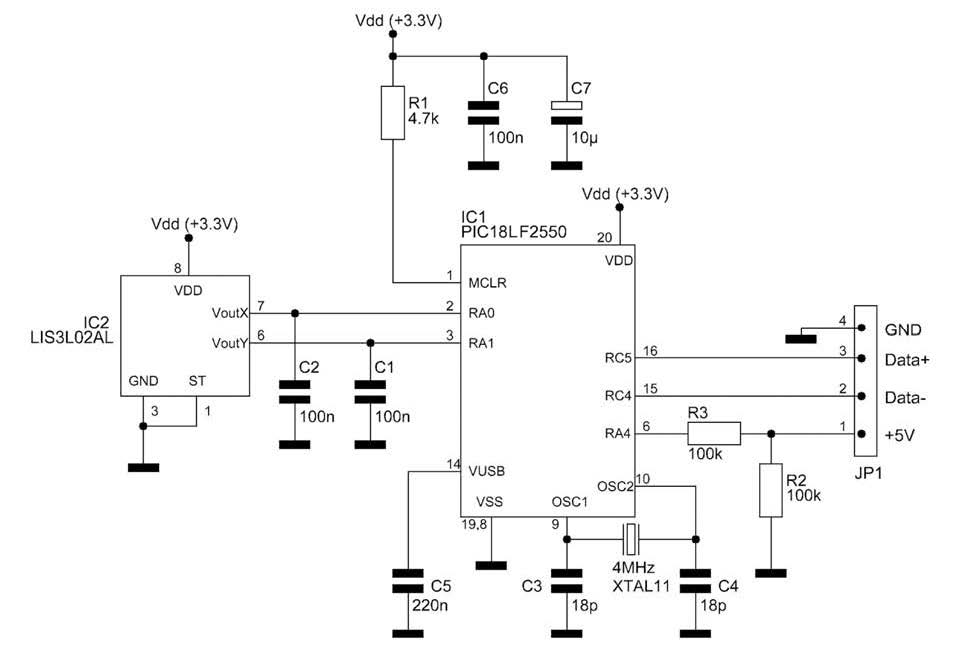
Figura 5: schema elettrico HID device con MEMS
I condensatori C1 e C2 completano i filtri passa-basso delle due uscite del MEMS: il valore prescelto di 100 nF limita la banda passante a circa 15 Hz, valore adeguato per la nostra applicazione. Il Clock del PIC è generato tramite il quarzo XTAL1 da 4 Mhz ed il PLL interno che genera le frequenze di clock di 32 Mhz per la CPU e di 48 Mhz per l’interfaccia USB Full Speed. Si faccia attenzione alla disposizione dei terminali del connettore USB che dovrà essere di tipo A (come quello dei Flash Drive, per intenderci). Contrariamente a quanto siamo soliti fare con i dispositivi elettronici, la corretta disposizione meccanica del MEMS è cruciale: nella nostra applicazione sarà infatti necessario porre il sensore in orizzontale e con il puntino indicatore del pin 1 rivolto in alto a sinistra, pena ottenere un comportamento che non risponde a quello voluto. Si noti che nello schema elettrico le connessioni del MEMS sono viste dall’alto. Tutto il sistema è alimentato a 3.3 V, eventualmente ricavabili dall’interfaccia USB tramite un regolatore LVD opportuno.



Documento relativo all’ ipotetico utilizzo delle mems per misure di velocità e posizione semplice e chiaro. Ma si intravvedono grosse difficoltà di realizzazione pratica.
Però si potrebbe tentare …….