
Il concept dei self driving vehicles è strettamente legato alla necessità di avere un alto livello di sicurezza nella guida, alla prevenzione degli incidenti stradali e al monitoraggio di eventuali condizioni di pericolo che si potrebbero verificare nella fase di avanzamento dell’auto, come ad esempio il rilevamento di un ostacolo o la necessità di effettuare una frenata di emergenza. Inoltre per certi versi l’idea della guida autonoma viene collegata nello scenario della smart city, dove semafori intelligenti si interfacciano con smart car, in un contesto in cui tutto raggiunge elevati livelli di connettività e i dati e le informazioni possono essere acquisiti ed elaborati, seguendo i principi del machine-to-machine, in un contesto ad alto livello di integrazione tra sensori, infrastrutture stradali, persone e veicoli, ma anche molta intelligenza artificiale, simulazioni di scenari e ambienti virtuali. In precedenti articoli abbiamo trattato l’impatto della blockchain sulla guida autonoma. In questo articolo studieremo la guida autonoma esaminando i diversi livelli di automazione standardizzati e analizzeremo la simulazione e la modellazione di driverless car con l’applicativo software Simulink, nell’ottica dell’ottimizzazione della progettazione di modelli e sistemi.
INTRODUZIONE
I veicoli a guida autonoma possono davvero cambiare radicalmente l’assetto della guida così come finora è stata concepita. Pensiamo ai componenti hardware e agli applicativi software implementati a bordo da ormai quasi tutte le case automobilistiche, agli ausili alla guida a bordo veicolo, come ad esempio l'Adaptive Cruise Control (ACC) con il quale l'autista può controllare il volante dell’autovettura, mentre al sistema automatico spetta la funzione di regolazione della velocità, o ancora il Parking Assistance dove l'autista controlla la velocità del veicolo e il volante viene gestito in autonomia. L’Adaptive Cruise Control è capace di mantenere una velocità di crociera e di modificare costantemente l'andatura in base al traffico, perchè riduce o aumenta automaticamente la velocità in base alle condizioni del traffico, garantendo al veicolo sempre la giusta distanza di sicurezza dalle altre auto, grazie all’utilizzo di Radar e telecamere. I veicoli motorizzati sono caratterizzati da un’elevata percentuale di sistemi Elettrici/Elettronici (E/E) a bordo che possono anche controllare il comportamento dinamico dell’auto sui quali vengono implementati. I sistemi avanzati di assistenza alla guida Advanced Driver Assistance Systems (ADAS) sono sistemi elettronici di assistenza alla guida sviluppati per migliorare la sicurezza in auto dal momento che aiutano a prevenire eventuali incidenti rendendo la guida anche più rilassante. Nella casistica dei sistemi ADAS rientrano i sensori pioggia e per il parcheggio, il cruise control adattivo, la frenata automatica d’emergenza per evitare collisioni con altri veicoli e il riconoscimento automatico dei segnali stradali. Anche il Lane Keeping System rientra nei sistemi ADAS ed ha la funzione di avvisare il pilota del superamento della linea di corsia e di riportare automaticamente il veicolo nella carreggiata. Cambia quindi la modalità di interazione tra veicolo e guidatore oltre che il modo in cui viene gestito il veicolo, relativamente a quelli che sono i componenti meccanici comunemente usati per prenderne il controllo, come volante, freno e acceleratore. La differenza sostanziale tra un veicolo tradizionale e un veicolo self driving, come può essere un taxi per il trasporto persone completamente robotizzato e autonomo o una generica autovettura senza conducente, è quindi nella modalità di monitoraggio della guida stessa e nella risposta alle situazioni di emergenza che si possono presentare durante l’avanzamento dell’auto, come ad esempio un rischio di collisione con un altro veicolo o un ostacolo lungo la carreggiata. La fase di simulazione e testing di un veicolo a guida autonoma avviene in ambienti complessi e spesso caratterizzati da condizioni operative estremamente variabili. Poter utilizzare un software di simulazione per testing virtuale dei veicoli è determinante per validare il livello di sicurezza e renderlo conforme allo standard normativo internazionale della ISO 26262 che fornisce le linee guida per garantire la sicurezza funzionale delle driverless car su strada, oltre che per ottimizzare la fase di sviluppo. Per cui, a livello progettuale i veicoli a guida autonoma rappresentano sistemi complessi, sia dal punto di vista delle funzionalità che dal punto di vista delle interazioni con l’ambiente circostante e dell’ambiente nel quale si inseriscono. Ad esempio, grazie alle simulazioni di sensori come Lidar e Radar, è possibile ottimizzare ogni fase della progettazione e creare scenari di guida. Perchè quindi la guida autonoma? Riassumendo, i punti di forza dei veicoli self driving sono i seguenti: maggiore sicurezza e affidabilità, prevenzione degli incidenti stradali, aumento del comfort nella guida e migliori prestazioni.
I LIVELLI DI AUTOMAZIONE
La nota società statunitense SAE International Automotive, acronimo che sta per Society of Automotive Engineers, il più importante ente che si occupa della normazione e dello sviluppo e definizione degli standard ingegneristici relativi ai veicoli motorizzati, sia nel campo dell'industria automobilistica che veicolistica e aerospaziale, ha definito per la guida autonoma ben 6 livelli di automazione. Si tratta precisamente di 5 livelli più il livello zero, in base ai quali vengono diversificati e classificati i veicoli a guida autonoma, noti anche come Self Autonomous Driving Vehicles, o parzialmente autonoma. Nel settore automobilistico infatti, così come in quello industriale, è molto sentita la necessità di avere degli standard di riferimento e delle regole che siano alla base di tutto il processo produttivo, a partire dalla fase progettuale, fino alla realizzazione e all’utilizzo di un determinato prodotto. Dalla classificazione in livelli che viene fatta della guida autonoma, senza dubbio un ulteriore strumento utile per i consumatori nella fase di valutazione di un eventuale acquisto, si evince subito che per i veicoli a guida autonoma gli scenari sono diversificati e variano in base a diversi parametri, come le funzionalità implementate a bordo, l’interazione tra guidatore e sistema automatico, il contesto nel quale è inserito il veicolo e anche in base al periodo di produzione dell’autovettura. In definitiva un metodo per valutare le capacità di guida autonoma del veicolo. Il report sui livelli dell’automazione per la guida autonoma è stato presentato con il nome di “Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems”. A questo link di collegamento è disponibile il report completo che è possibile visionare per approfondimenti. I diversi livelli di automazione vengono quindi così suddivisi:
Livello 0 - No Automation
Il veicolo viene gestito unicamente dal guidatore, sia in termini di direzione di spostamento, quindi ad esempio decidere se il veicolo dovrà procedere in avanti, indietro, destra o sinistra, che di velocità, impostando la velocità di crociera e i limiti. Potrà quindi decidere e valutare se è il caso di accelerare o decelerare la velocità, condizioni che fisicamente corrispondono a una variazione infinitesima di velocità dv > 0 e dv < 0. Questo livello che prevede la totale assenza di automazione è presente nelle vetture prodotte fino ai primi anni duemila. I veicoli che rientrano in questa categoria sono privi di dispositivi elettronici di controllo. In definitiva, quindi, il sistema automatico può inviare degli avvertimenti ed eventualmente intervenire, ma non è dotato della funzione di controllo del veicolo.
Livello 1 - Driver Assistance
In questo livello rientrano tutti quei veicoli caratterizzati dalla presenza di supporti per la guida assistita, in particolare il guidatore può prendere le decisioni relative a operazioni di frenatura, accelerazione, direzione di avanzamento, avendo perciò la totale responsabilità del veicolo. La guida però viene supportata da altri sistemi che forniscono informazioni circa l’eventuale presenza di pericoli o condizioni avverse durante il tragitto effettuato. L'automobile si limita ad analizzare e rappresentare le situazioni sotto forma di alert visivi o acustici.
Livello 2 - Partial Automation
Nel livello di automazione parziale si ha uno scenario un pò diverso rispetto agli altri precedentemente esaminati. Il veicolo può gestire la fase di accelerazione e di frenatura mediante sistemi di guida assistita, come ad esempio la frenata assistita o la frenata di emergenza anticollisione. Il guidatore deve gestire direzione di avanzamento e controllo del traffico.
Livello 3 - Conditional Automation
In questo livello rientrano tutti quei veicoli che possiedono un vera e propria automazione. L’automobile quindi sarà in grado di guidare autonomamente gestendo sia l’accelerazione che le frenate e la direzione di avanzamento del veicolo. L’intervento del pilota è limitato a scenari problematici o a casi in cui l’utilizzo della guida autonoma non è autorizzata o può risultare troppo pericolosa. Uno scenario di esempio potrebbe essere rappresentato da: veicolo che avanza in una condizione di traffico e il pilota monitora costantemente il traffico stradale e resta pronto a intervenire in caso di necessità o situazioni di pericolo.
Livello 4 - High Automation
A questo livello appartengono le autovetture che possono gestire autonomamente l’accelerazione, la frenata, la direzione di avanzamento, oltre che monitorare costantemente il traffico. L’auto può quindi guidare in totale autonomia, mentre il pilota può prendere il controllo della guida all’occorrenza qualora ne sia necessario.
Livello 5 - Full Automation
Appartengono a questo livello tutti i veicoli per i quali è totalmente assente la presenza di un pilota, sia come guida che come assistenza. Per questo il veicolo è in grado di guidare autonomamente e di gestire del tutto la fase di guida, in particolare il veicolo individua il percorso da seguire, inclusa la direzione, la fase di accelerazione o frenatura, sempre sulla base delle condizioni del traffico e delle situazioni di emergenza.
A partire dal livello 0 fino al livello 5, aumenta progressivamente l’influenza del sistema automatico e si riduce, fino ad annullarsi del tutto, l’intervento del pilota, passando quindi da guida assistita a guida totalmente autonoma, annullando di fatto ogni controllo manuale.
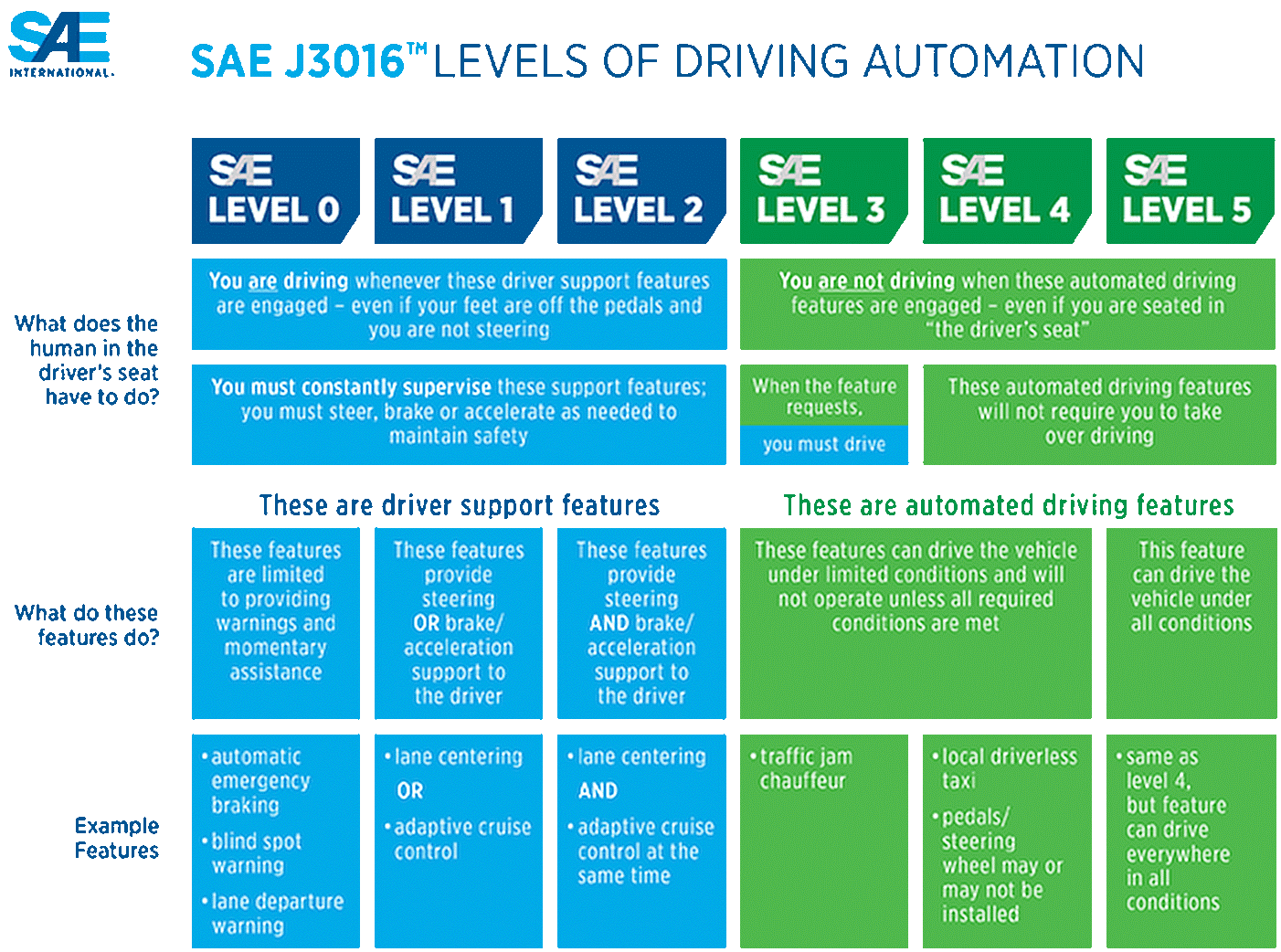
Figura 1. Tabella dei diversi livelli di automazione per la guida autonoma (Fonte SAE)
L’AUSILIO DEGLI APPLICATIVI SOFTWARE MATLAB E SIMULINK PER LA GUIDA AUTONOMA
Matlab e Simulink sono dei potenti applicativi software appartenenti al portfolio MathWorks, che trovano largo impiego anche in ambito automotive, in particolare nei seguenti settori: sistemi embedded, sistemi di controllo, verifica, convalida, test e analisi dei dati ingegneristici. Il software Matlab [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2323 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Progetto di un Data Logger con microSD e microcontrollore ESP32 – Parte 2
Corso di Elettronica per ragazzi – Puntata 1
Il Nuovo Sistema di Controllo Operativo GPS Satellitare OCX

Raccolta di energia in radiofrequenza: che fine ha fatto la rectenna?

Deep Learning per l’identificazione di segnali wireless
