
L’uso della trasmissione di dati attraverso un loop di corrente 4-20 mA risale alle telescriventi dell’inizio degli anni ’60. Una corrente pari a 4 mA circolante in un circuito chiuso era associata ad un valore logico ed una corrente di 20 mA al suo complemento. Velocità fino a 19 kbaud erano assicurate su distanze di varie decine di metri.
La bassa impedenza della connessione e la conseguente elevata immunità ai disturbi elettrici, unita alla possibilità di trasportare l’alimentazione per il nodo remoto, promossero negli anni successivi una grande diffusione e popolarità dell’interfaccia 4-20 mA nella trasmissione dati tra sensori e apparecchiature di controllo nel campo dell’automazione e del controllo di processo. Alla corrente di 4 mA viene in questo caso associato il valore di inizio scala, alla corrente di 20 mA il valore di fondo scala. I 4 mA di base sono inoltre disponibili per l’alimentazione della circuiteria remota. Collegamenti a tre fili possono essere usati quando sia necessaria una corrente di alimentazione più elevata o una sorgente di alimentazione in alternata. L’informazione analogica che rappresenta la lettura del sensore viene recuperata dalla stazione base leggendo la caduta di tensione su un resistore shunt in serie al loop di corrente, vedi lo schema di principio in figura 1.
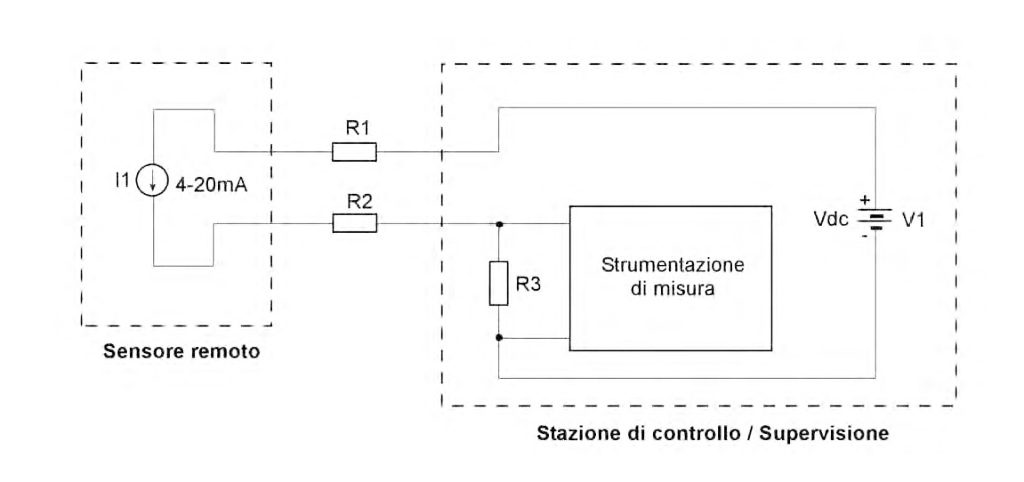
Figura 1: schema di principio di trasmissione dati 4-20mA.
Valori tipici per il resistore shunt vanno da 50 a 250 ohm. Alcuni altri vantaggi rendono questa tecnica ancora interessante anche oggi, malgrado la diffusione di tecnologie alternative di connessione in impianti e macchine (field bus). La trasmissione di dati ed alimentazione può essere fatta con una singola coppia di conduttori intrecciati a passo stretto, rendendo cosi il collegamento ancora meno sensibile a rumore ed interferenze. La spira formata dai due conduttori, in cui potrebbe essere indotto un segnale di rumore da interferenze elettromagnetiche, risulta di area molto ridotta. L’immunità conseguentemente ottenuta può in qualche caso rendere superflue schermature costose e complesse da realizzarsi sul campo. La trasmissione in corrente provvede insensibilità alla caduta di tensione introdotta dalla resistenza dei fili di collegamento, resistenze di contatto, effetti termoelettrici parassiti. Queste prestazioni sono dovute all’uso di un circuito generatore di corrente come sorgente della trasmissione di informazione, associato alle elevate tensioni di alimentazione adottate al fine di rendere trascurabili le cadute di tensione lungo l’anello. Tensione di alimentazione tipica dei loop in corrente è 24V dc, ma sono utilizzate anche 12V, 15V, 36V. La circolazione di una corrente minima garantita rende semplice realizzare un sistema di diagnostica dell’integrità della linea di comunicazione, rilevando circuiti aperti come lettura di corrente nulla. L’emissione nei primi anni ’80 di standard per i bus di comunicazione basati su linee differenziali, RS422 e RS485, erosero il campo di applicazione dei trasmettitori 4-20mA, pur potendone trovare ancora oggi larga diffusione nella trasmissione remota di grandezze fisiche a calcolatori di supervisione e/o controllo (temperatura, umidità, pressione, portata…). Configurazioni che vedono Sensori remoti installati a distanze reciproche importanti, consentono cablaggi meno costosi di un bus che richiede comunque una coppia supplementare di fili per l’alimentazione. Un limite della normativa è la mancanza di uno standard meccanico definito, con conseguente assenza di omogeneità nella definizione di connettori e cablaggi. Un altro limite particolarmente avvertito, in questi tempi di sensori intelligenti equipaggiati da microcontrollori, è l’unidirezionalità della trasmissione dati nello schema originale. La proposta dello standard HART (Highway Addressable Remote Transducer) ha introdotto una comunicazione digitale bidirezionale compatibile con i loop di corrente 4-20 mA. Un segnale FSK (Frequency Shift Keyed) con ampiezza di picco di 1 mA è sovrapposto al loop analogico 4-20 mA. Le due frequenze usate sono 1200 Hz per rappresentare il livello logico ‘1’ e 2200 Hz per rappresentare il livello ‘0’. L’integrato AD5421 ad esempio, realizza in un piccolo contenitore TSSOP a montaggio superficiale un completo trasmettitore, con alimentazione attraverso il loop. Un regolatore di tensione e tensione di riferimento sono integrati in modo da provvedere ad alimentare se stesso ed il resto della circuiteria nel trasmettitore, senza componentistica esterna. Una interfaccia a tre fili SPI compatibile consente una connessione a microcontrollori fino alla rispettabile velocità di 20 Mbps. AD5421 può lavorare con modem HART senza degrado di prestazioni. La gamma di temperatura operativa è molto estesa, -40 – 105 C°. Il DAC integrato con uscita in corrente ha 16 bit di risoluzione con errori di linearità, offset e guadagno molto bassi. Una ampia diagnostica è integrata consentendo di rilevare errori di comunicazione SPI, perdita della connessione SPI, corrente di loop fuori dai limiti operativi, tensione di loop troppo bassa. La figura 2 presenta un esempio di trasmettitore di temperatura realizzato senza integrati dedicati ma fondato sul circuito integrato LM10 e componenti discreti.
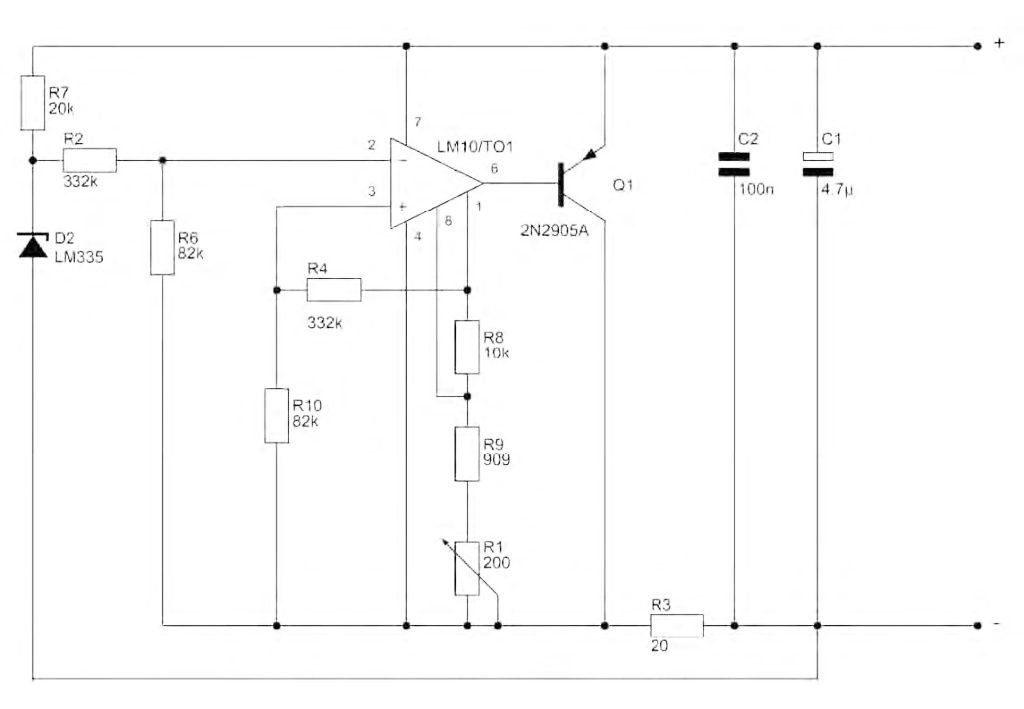
Figura 2: sensore di temperatura con trasmissione 4-20mA.
La sorgente di tensione di riferimento e l’operazionale indipendente di LM10 sono qui usati per realizzare un convertitore tensione-corrente che trasforma il segnale proporzionale alla temperatura, in uscita dal sensore LM335, nella corrente 4-20 mA trasmessa sul loop.

Figura 3: un generatore di aria calda con interfaccia 4-20mA.
Un altro interessante aspetto dei loop di corrente, confrontati con i bus differenziali, consiste nell’analisi della tolleranza ai guasti. Un cortocircuito sui cavi di connessione non e’ tollerato, mentre non sempre un nodo di bus differenziale che si guasti mantenendo fisso il dato in uscita è in grado di mettere il bus fuori servizio. Le linee 4-20 mA sono più robuste, un nodo guasto non influenza le altre linee componenti il sistema e neppure un cortocircuito risulta intollerabile, se la linea è opportunamente progettata. Avendo la linea un resistore shunt in serie, un eventuale cortocircuito sul cavo imporrà una corrente più elevata del normale ma non sarà in grado di cortocircuitare l’alimentazione. La corrente di guasto potrebbe inoltre servire da trigger per la rilevazione del malfunzionamento.



LM335 è una serie della Texas Instruments e include sensori di temperatura di precisione all’interno di un unico package,
Essa opera tra −40°C e 100°C e fornisce una uscita che dipende dalla temperatura secondo la seguente relazione: 10 mV/K. con errori generalmente inferiori ad un grado.
La trasmissione dei dati e la velocità con la quale vengono trasmessi è parte integrante del controllo di processo. I sensori producono dati che bisogna acquisire, analizzare e trasmettere ai control systems. Nelle applicazioni industriali sono molto utili ad esempio per la trasmissione del segnale delle vibrazioni in 4-20 mA. Gli aspetti progettuali sui quali è necessario lavorare sono quelli legati all’immunità ai disturbi elettromagnetici.