Sul blog di Elettronica Open Source puoi leggere non solo tutti gli articoli Premium riservati agli abbonati Platinum 2.0 e inseriti nella rivista Firmware 2.0 (insieme ad articoli tecnici, progetti, approfondimenti sulle tecnologie emergenti, news, tutorial a puntate, e molto altro) ma anche gli articoli della Rubrica Firmware Reload. In questa Rubrica del blog abbiamo raccolto gli articoli tecnici della vecchia rivista cartacea Firmware, che contengono argomenti e temi evergreen per Professionisti, Makers, Hobbisti e Appassionati di elettronica. Ai progettisti di sistemi integrati, di apparecchiature di rete e di comunicazione si richiede costantemente, da un canto, di aumentare la velocità di trasmissione dati e le prestazioni del sistema da sviluppare oltre ad aggiungervi varie caratteristiche e funzionalità, dall’altro, di ridurne i consumi energetici. Nell’articolo vediamo come sia possibile conciliare queste esigenze contrapposte.
GESTIONE DIGITALE DI SISTEMI DI ALIMENTAZIONE (DPSM)
Tenendo presente quanto sopra esposto, come deve procedere il progettista di sistemi per configurare una soluzione di gestione digitale di un sistema di alimentazione per il prodotto finale? Uno degli obiettivi principali consisterà nel progettare un sistema che possa essere configurato agevolmente e monitorato senza problemi tramite un bus di comunicazione digitale. Questo si potrà ottenere utilizzando uno dei seguenti sistemi: I2C, SMBus o PMBus. Tutti e tre questi bus possono rendere possibile la funzione di telemetria a richiesta per impostare, monitorare, modificare e registrare i parametri di alimentazione di qualsiasi configurazione di convertitore PoL nel sistema. La Figura 1 mostra uno schema semplificato di tale sistema. Come si può osservare in questo esempio, i convertitori PoL illustrano tre topologie diverse. Nella parte superiore della configurazione, si impiega un chip di gestione del sistema di alimentazione (PSM, Power System Manager) insieme a un convertitore DC/DC convenzionale; quest’ultimo può presentare qualsiasi topologia e qualsiasi grado di integrazione poiché è il PSM che ne consente l’interfacciamento, il controllo e il monitoraggio attraverso il bus di comunicazione. Il convertitore PoL centrale presenta un livello maggiore di integrazione, ossia il convertitore DC incorpora il PSM (nello stesso contenitore). Infine, il convertitore PoL inferiore è un modulo compatto che incorpora il PSM, il convertitore DC/DC e tutti i corrispondenti componenti esterni in un singolo fattore di forma. Il mercato offre un’ampia gamma di dispositivi per consentire ai progettisti di sistema di scegliere come configurare i requisiti del sistema di alimentazione digitale a partire dai PSM e dai corrispondenti convertitori DC/DC PoL, fino a un singolo regolatore μModule. La Figura 2 mostra lo schema dell’LTC3884, un controller in discesa PolyPhase® a doppia uscita con rilevazione DCR a valori ultra-bassi, con gestione digitale dell’alimentazione del sistema. L’LTC3884 fornisce due uscite ad alta corrente da un ampio intervallo di tensioni - da 4,5 V a 38 V - con un’interfaccia seriale compatibile con PMBus basata su I2C. Il controller impiega un’architettura in modalità di controllo di corrente a frequenza costante, insieme a uno schema unico che migliora il rapporto segnale/rumore del segnale di rilevazione della corrente, per offrire prestazioni eccellenti in applicazioni con DCR bassissimo.
Il controllo programmabile dell’anello consente di compensare il controller in modalità digitale. È possibile programmare la frequenza di commutazione, la tensione di uscita corrispondente alla sequenza delle fasi del canale e l’indirizzo del dispositivo sia tramite l’interfaccia digitale che mediante resistori di configurazione esterni. Inoltre, i parametri possono essere impostati attraverso l’interfaccia digitale o memorizzati nella EEPROM. Entrambe le uscite hanno funzioni di protezione dai guasti e indicatori di funzionalità dell’alimentazione indipendenti. Infine, il dispositivo è supportato dallo strumento di sviluppo software LTpowerPlayTM dotato di interfaccia grafica utente (ulteriori dettagli in merito più avanti). Potrebbero esservi applicazioni in cui è desiderabile un livello superiore di integrazione nel convertitore PoL, specialmente in applicazioni in cui le correnti di uscita non sono così alte, come nell’intervallo da 4 a 6 A. È per queste circostanze che è stato sviluppato l’LTC3815, un convertitore in discesa sincrono monolitico da 6 A con gestione digitale dell’alimentazione del sistema - vedere Figura 3. Questo convertitore PoL utilizza un’architettura in modalità di controllo in corrente, a frequenza costante con tempo On controllato bloccabile in fase per offrire una risposta al transitorio estremamente veloce e consentire il funzionamento con il brevissimo “t-On” necessario per regolare basse tensioni di uscita ad alte frequenze di commutazione. La tensione di uscita è programmabile da 0,4 V al 75% della tensione d’ingresso con un solo resistore esterno o con un riferimento di tensione esterno tramite l’apposito pin. Il margine di uscita può essere aumentato o ridotto del 25% con incrementi piccolissimi - fino a 0,1% - tramite un’interfaccia PMBus standard. La frequenza di funzionamento dell’LTC3815 è programmabile da 400 kHz a 4 MHz mediante un resistore esterno oppure, per applicazioni sensibili al rumore di commutazione, può essere sincronizzata con un clock esterno nello stesso intervallo. Infine, l’interfaccia seriale può anche essere utilizzata per leggere lo stato di malfunzionamento, così come acquisire il valore medio (pesato su circa 4ms) o quello di picco della corrente di ingresso/uscita, la tensione di ingresso/uscita e la temperatura.
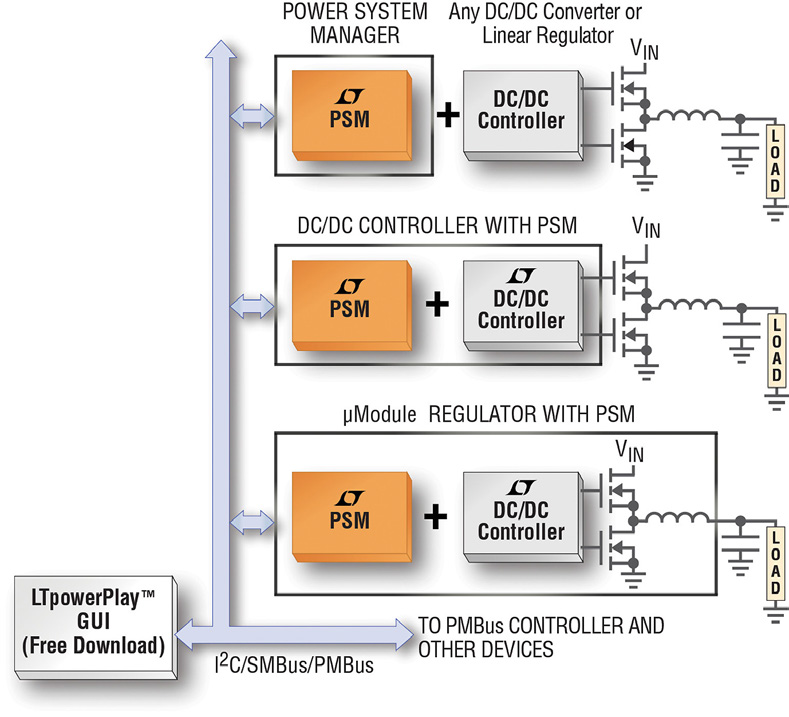
Figura 1: Configurazione tipica per la gestione digitale di un sistema di alimentazione
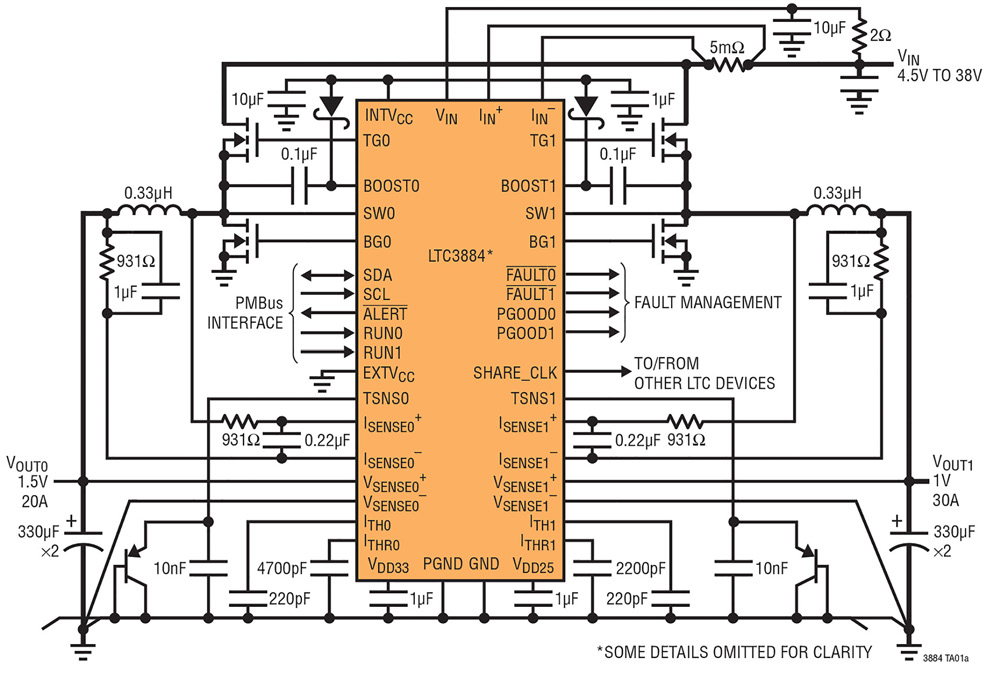
Figura 2: Schema dell’LTC3884 in grado di applicare 1,5V a 20A e 1,0V a 30A
INTERFACCIA GRAFICA UTENTE (GUI) UNIVERSALE LTPOWERPLAY PER DISPOSITIVI DPSM
Uno dei vantaggi fondamentali di un sistema configurato con dispositivi DPSM è che con la GUI adatta è facile comunicare con ciascun convertitore PoL nel sistema. Quindi, sin dall’inizio si è deciso di sviluppare una GUI che fosse una piattaforma di sviluppo completa, facilmente utilizzabile con tutte le diverse tipologie di prodotti offerti nella sua linea DPSM: LTpowerPlay, un ambiente di sviluppo basato su Windows. Questo software non solo rende facile controllare e monitorare simultaneamente più dispositivi compatibili con PMBus, ma consente anche di modificare in tempo reale le configurazioni dei convertitori DC/DC scaricando i parametri del sistema nella EEPROM di ciascun dispositivo. Viene così ridotto il tempo di progettazione e sviluppo poiché le configurazioni del sistema possono essere regolate dal software, piuttosto che ricorrendo al tradizionale metodo di sostituzione dei componenti e ricablaggio delle schede con un saldatore. Non è tutto: una volta implementato un sistema definitivo sul campo, installato ad esempio in un data center, utilizzando questa GUI è possibile regolarlo in tempo reale semplicemente aggiornando i parametri operativi dei convertitori PoL. La Figura 4 mostra una schermata tipica del pannello dell’LTpowerPlay che un utente vede quando interroga il sistema. Tutti i prodotti PMBus sono supportati da questo sistema di sviluppo software che può aiutare i progettisti a eseguire velocemente il debug dei sistemi sia durante lo sviluppo iniziale sia quando vengono installati nella sede di un utente. È così possibile monitorare, controllare e regolare velocemente e facilmente tensioni di alimentazione, limiti e sequenziazione. Inoltre, i test di marginatura di produzione sono eseguibili agevolmente tramite una coppia di comandi PMBus standard.
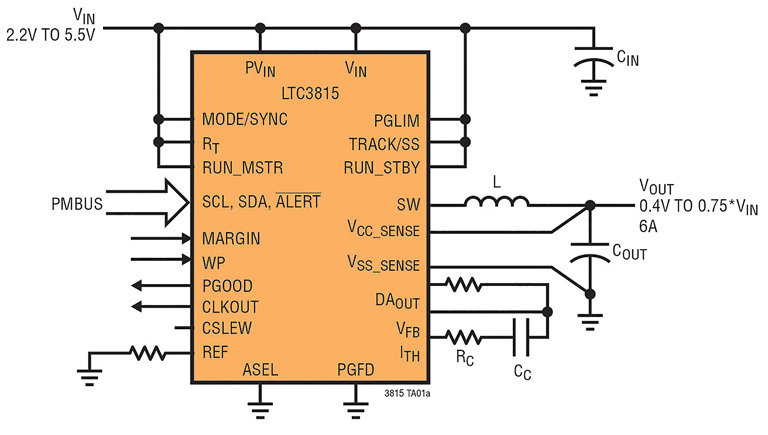
Figura 3: Schema applicativo dell’LTC3815 per un ingresso da 2,2V a 5V e uscita ridotta a 0,4V a 6A
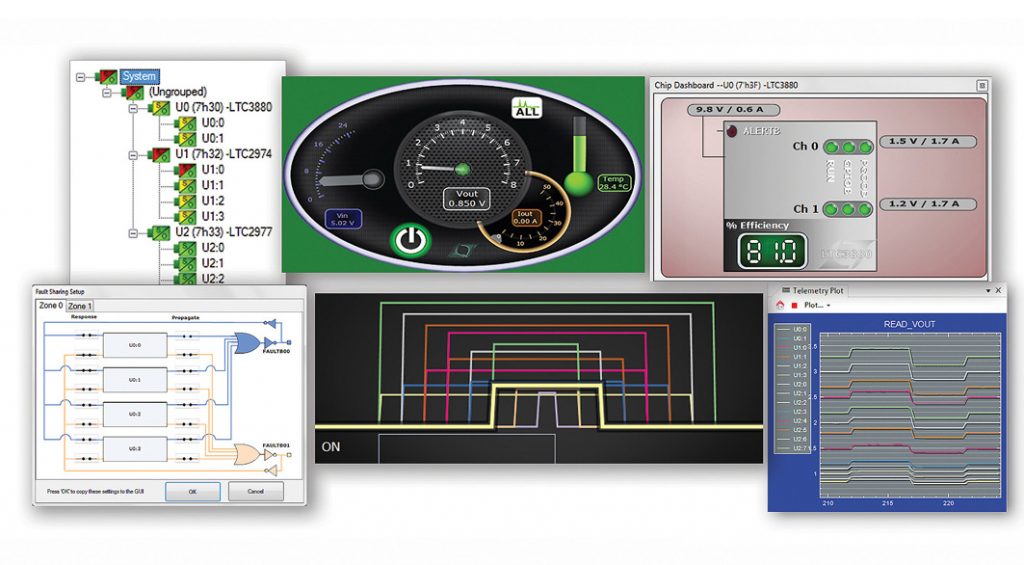
Figura 4: Una schermata tipica del pannello della GUI dell’LTpowerPlay
CONCLUSIONE
Disponendo di funzioni di gestione digitale dell’alimentazione in sistemi di memorizzazione, telecomunicazioni o trasmissione dati, i progettisti di sistemi hanno gli strumenti necessari per sviluppare sistemi di alimentazione ecologici, che soddisfano le prestazioni prefissate (velocità di elaborazione, di trasmissione dati e così via) con consumo minimo di energia al livello del punto di carico, della scheda, del rack e anche di installazione. Ne consegue una riduzione dei costi dell’infrastruttura nonché del costo totale di proprietà per l’intera durata del prodotto. E mentre da un lato potrebbe così scomparire il “divertimento” di usare il tradizionale approccio con saldatore e ricablaggio per eseguire il debug dei sistemi hardware, dall’altro la programmabilità software di un prodotto DPSM riduce notevolmente il tempo di messa a punto normalmente richiesto per queste attività.