Le applicazioni di controllo motore, di conversione e trasformazione dell’energia, di audio e video encoding e decoding, sfruttano oggi sempre più le periferiche di pulse width modulation presenti nei microcontrollori. Esistono tecniche e trucchi hardware e software volti alla riduzione del rumore generato da queste periferiche: eccoli svelati in questo articolo.
Le moderne tecniche di controllo motore, nonché le specifiche e raffinate analisi di segnale per l’ottimizzazione di conversione dell’energia, costituiscono oggi uno dei più interessanti ed attuali punti di interesse nelle applicazioni elettroniche. I progettisti, per raggiungere livelli di efficienza e potenza sempre più elevati, fanno affidamento alle periferiche evolute dei microcontrollori, in particolare della periferica PWM. Ecco nel dettaglio alcuni esempi.
La periferica PWM e MCPWM di Microchip
Nell’ottica di descrivere la Pulse Width Modulation, può risultare interessante prendere ad esempio alcuni microcontrollori dotati di tale periferica. Il microcontrollore PIC16F877A di Microchip, ad esempio, è dotato di una periferica denominata Standard PWM. In figura 1 si riporta lo schema a blocchi della periferica PWM di tale microcontrollore.
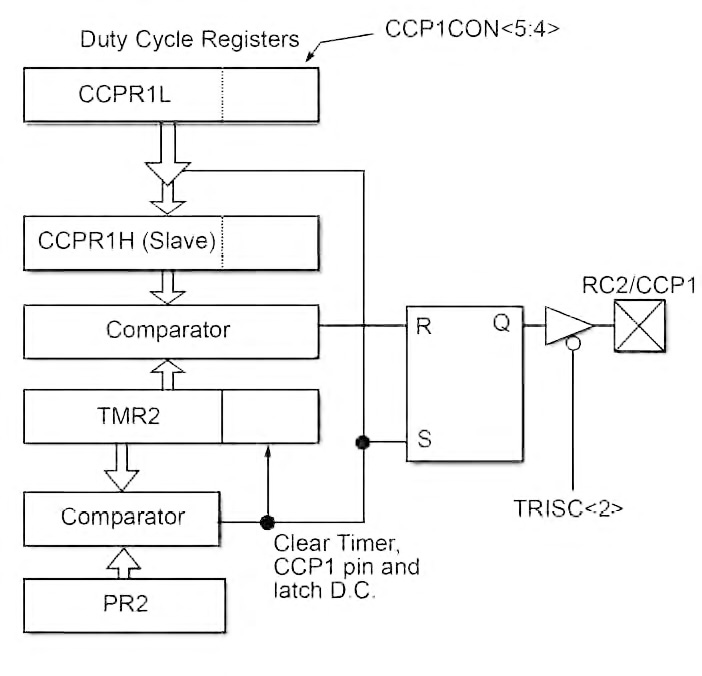
Figura 1: struttura del PWM Block nel PIC16F877A.
Come si evince dallo schema, la struttura interna è basata sull’utilizzo del TIMER2. Questo registro viene confrontato (Period Register 2), al fine di individuare il periodo di lavoro del PWM. Lo stesso timer2 poi, viene confrontato attraverso un diverso comparatore con il registro CCPR1L, in modo da ottenere il duty cycle del nostro PWM. Chiaramente, essendo il registro CCPR1L ad 8 bit, si potrà avere una granularità di 256 step nella realizzazione del duty cycle. Come si può vedere nello schema, è inoltre possibile aumentare questa granularità facendo uso di due bits aggiuntivi, i bit 4 e 5 del registro CCP1CON. In tal modo la granularità raggiunge il ragguardevole livello di 1024 steps, che consentono di realizzare dei DAC di un discreto livello, ponendo fuori del pin PWM un semplicissimo filtro passa-basso reallizato con RC.
Caratteristiche del rumore elettromagnetico
Le caratteristiche appena evidenziate sono sicuramente di grande utilità per i progettisti, i quali non devono dimenticare che però il segnale PWM costituisce una sorgente di rumore elettromagnetico molto che la forma d’onda del PWM stesso altro non è che un treno di impulsi a frequenza fissa. Analizzando lo spettro di frequenza del rumore generato dal PWM, infatti, si vede un andamento in cui la fondamentale e le armoniche di quest’ultima assumono un particolare rilievo sulle altre frequenze. Rumori di questo tipo possono risultare molto “pericolosi”, dal momento che possono compromettere la rispondenza dell’apparecchiatura alle normative europee inerenti le emissioni degli apparecchi elettrici. In figura 2 si riporta un esempio di spettro di un segnale PWM a 50kHz.
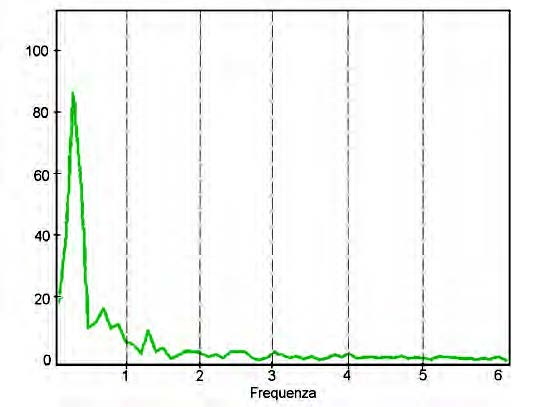
Figura 2: spettro di
un PWM a 50 kHz.
E’ evidente che la componente della fondamentale è di numerosi ordini di grandezza superiore alle altre frequenze, per cui l’azione del filtro dovrà essere mirata ed incisiva sulla frequenza del PWM stesso. Una delle principali applicazioni in cui si utilizzano i segnali PWM è l’azionamento di ventilatori in applicazioni di raffreddamento-convezione forzata. Queste applicazioni necessitano di correnti medioelevati, nell’ordine dei 300mA. Queste ventole sono realizzate con una board posta vicino all’asse di rotazione della ventola, come appare in figura 3.
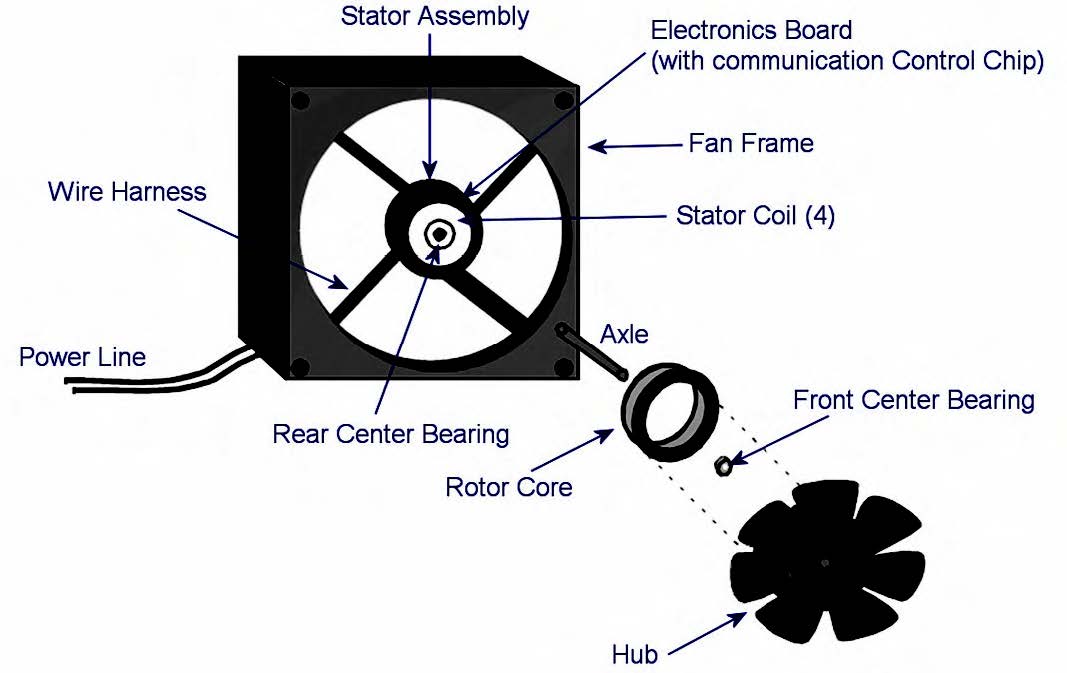
Figura 3: struttura di una ventola.
La rumorosità quindi può essere ridotta cercando di diminuire il picco di intensità di potenza generata in prossimità della frequenza di lavoro. Per fare questo esistono numerose tecniche, la più comune delle quali è chiamata “Tecnica di Spread”. La tecnica di spread consente semplicemente nel variare continuamente la frequenza di lavoro del PWM attorno al suo valore fondamentale, per poter “spalmare” su un’area di frequenza maggiore la potenza generata, senza avere il picco visto in precedenza. In figura 4 la forma d’onda dopo lo spreading.
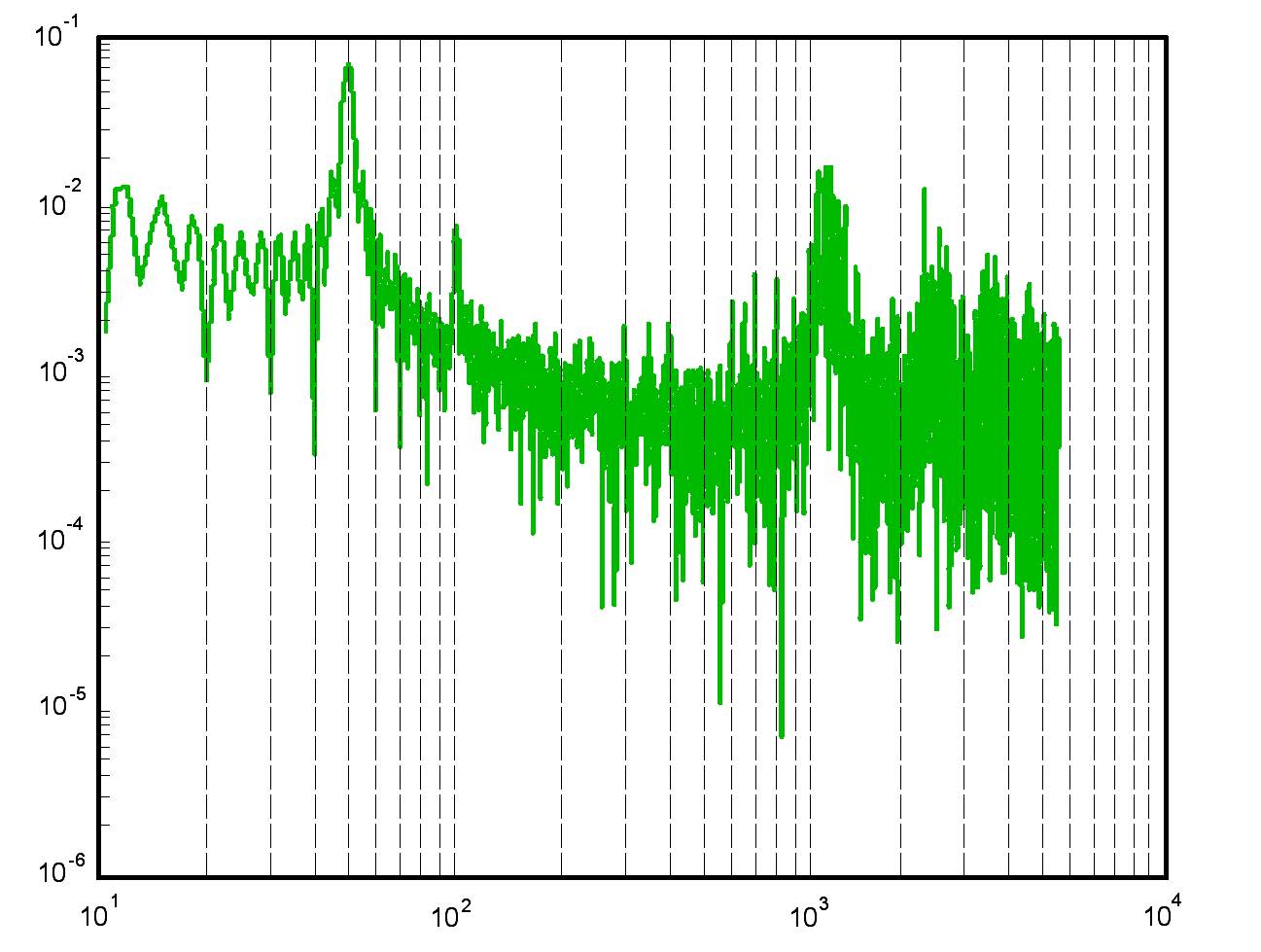
Figura 4: spettro del PWM dopo lo spreading
Evidentemente, la potenza in prossimità del picco è notevolmente ridimensionata rispetto al caso precedente. Come dato interessante, numerosi dispositivi Microchip facenti parte della famiglia Motor Control presentano la funzionalità “dithering”, attraverso la quale il microcontrollore muove la main frequency del PWM attorno al valore fondamentale con oscillazioni del +-5%. L’effetto che si ottiene è proprio quello rappresentato in figura 4, ossia un abbassamento del picco di potenza in prossimità della fondamentale del PWM, con relativo lieve innalzamento del valore medio. Grazie a tali tecniche la rumorosità elettromagnetica di un segnale PWM può essere notevolmente ridotta, consentendo alle apparecchiature di entrare facilmente entro i limiti imposti dalle normative europee ed extracomunitarie.
Caratteristiche del rumore acustico
Oltre al citato rumore elettromagnetico, un’altra rilevante fonte di disturbo è data dal rumore acustico, che come tutti sanno è caratteristico nelle applicazioni fan. La fonte principale di rumore, in tal caso, è il flusso d’aria: tale caratteristica è proporzionale alla velocità di rotazione della ventola. La seconda sorgente di rumore acustico, in termini di rilevanza, è la coppia generata dal motore a spazzole (BDC, ossia Brushed DC) con cui è generato il fan. Per come sono realizzati inter namente gli avvolgimenti in un ventilatore, si ha uno spunto di coppia ogni 90 gradi elettrici di rivoluzione dell’azionamento, che corrispondono a una frazione di rivoluzione meccanica, in dipendenza dal numero di avvolgimenti con cui è realizzato il ventilatore. In figura 5 si esemplifica tale ripple di coppia. Questo effetto è causa diell’effetto di rumore periodico di “ticking” caratteristico del funzionamento dei ventilatori.
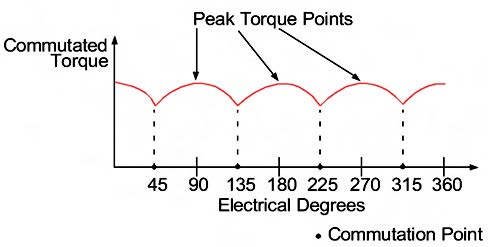
Figura 5: variazioni di coppia in funzione
dei gradi elettrici.
Contrariamente a quanto si può pensare, questa seconda fonte di rumore è più presente nei motori che procedono a basse velocità di regime, dal momento che gli “spunti” meccanici cui l’intera struttura della ventola è sottoposta sono ad una frequenza più bassa, quindi più vicina alla frequenza cui l’orecchio umano è più sensibile (1kHz). Tale problematica è quindi evidente in misura maggiore nelle grosse turbine piuttosto che nelle piccole ventole. Esistono alcune valide tecniche hardware che consentono di ridurre tale rumore acustico. Sostanzialmente, il concetto è quello di rallentare lo “slew rate” del segnale PWM, in modo da diminuire gli impulsi forniti al profilo di coppia descritto in precedenza. Un esempio è quello presentato in figura 6, in cui si addolcisce la curva di PWM (nel gergo si parla di “smoothing” del segnale) attraverso l’impiego di un condensatore ceramico posto sulla base dell’attuatore del fan, in questo caso particoalre un BJT. Il condensatore, posto a valle della resistenza serie di pilotaggio dell’attuatore, realizza la funzione di Low Pass Filter: questo effetto è chiaro in figura 6, in cui si evidenzia un ritardo nella fase con capacità rispetto alla situazione con capacità.
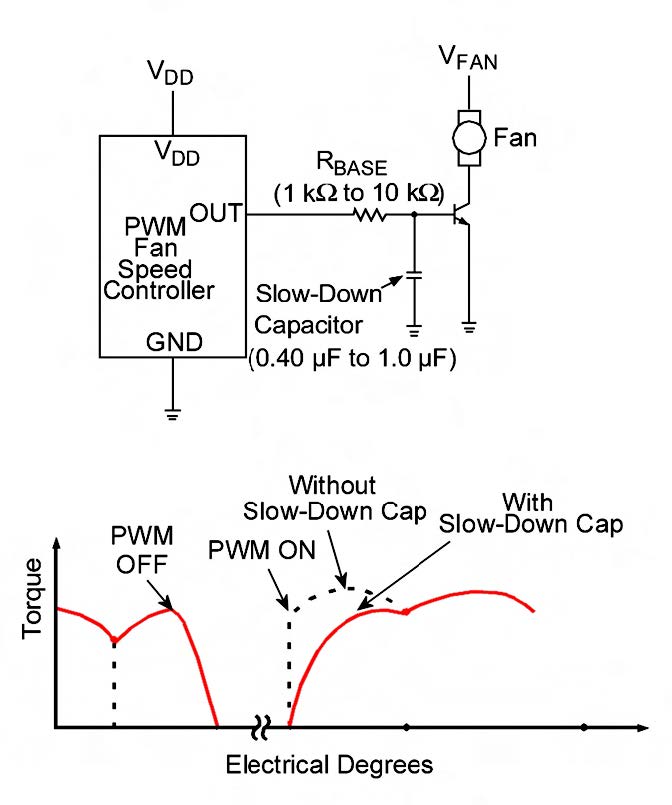
Figura 6: smoothing.
Per un corretto funzionamento di questa tecnica, bisogna far si che la costante di tempo del filtro RC sia compresa nell’intervallo [1…5] millisecondi, con resistori commerciali compresi nell’intervallo [1…10]kOhm, per consentire correnti di base adeguate.