Lo scopo di questo articolo è quello di presentare una panoramica relativa a una famiglia di sensori di grande interesse la cui importanza è cresciuta enormemente grazie ai recenti progressi della tecnologia elettronica: i sensori di prossimità.
Anzitutto occorre ricordare brevemente in cosa consiste un sensore e quali possono essere i suoi campi di utilizzo nelle apparecchiature di tipo elettronico. Per sensore si intende in generale un dispositivo in grado di misurare il valore di una grandezza fisica applicata al suo ingresso, fornendo in uscita una grandezza il cui valore è funzione della grandezza misurata. Nel nostro caso specifico, restringeremo il campo d’interesse intorno a quei sensori la cui uscita è una grandezza di tipo elettrico; essi vengono poi suddivisi in due principali categorie: analogici e digitali, a seconda del tipo di uscita fornita dal sensore stesso. I sensori vengono anche indicati con il termine trasduttori, e questa definizione è molto significativa: in base a quanto detto precedentemente, infatti, il sensore converte la grandezza fisica applicata al suo ingresso in un’altra grandezza (nel nostro caso di tipo elettrico, quindi una tensione oppure una corrente) che viene resa disponibile alla sua uscita.
I sensori moderni possono inoltre disporre di apposi te interfacce per consentire la trasmissione dello stato dell’uscita verso un controllore host secondo protocolli standard (ad esempio SPI o I2C). Osserviamo inoltre come i sensori di prossimità costituiscano un caso particolare di trasduttore: il loro compito infatti non è tanto quello di misurare una grandezza fisica, quanto quello di rilevare la vicinanza (prossimità) di un oggetto. Le grandezze fisiche in ingresso a un sensore possono essere di vario tipo, quali ad esempio: temperatura, pressione, forza, velocità, flusso, densità, dimensione o volume, posizione/velocità/accelerazione, livello o profondità, massa o peso, acidità e alcalinità, umidità, ecc...
Classificazione
Un sensore di prossimità è in grado di rilevare la presenza di un oggetto che si trovi nelle immediate vicinanze, ma anche di fornire una misura della distanza a cui si trova l’oggetto rispetto al sensore. Nel primo caso, l’uscita del sensore sarà di tipo on/off, quindi con un comportamento equivalente a uno switch. Nel secondo caso, invece, il sensore produrrà in uscita un segnale continuo, proporzionale alla misura della distanza, rendendoli di fatto equivalenti a dei trasduttori di posizione lineare. Nella terminologia tecnica inglese, i sensori di prossimità vengono anche levare la presenza o il movimento di oggetti viene indicata con il termine portata nominale o anche campo sensibile. I sensori di prossimità vengono solitamente classificati in base al principio fisico utilizzato per eseguire la conversione. Avremo pertanto le seguenti categorie di trasduttori:
» sensori di tipo capacitivo;
» sensori di tipo induttivo;
» sensori di tipo magnetico;
» sensori di tipo ultrasonico;
» sensori di tipo ottico.
Prima di analizzare in dettaglio le classi di sensori di prossimità precedentemente elencate, occorre citare i principali vantaggi offerti dai sensori di prossimità:
» sono caratterizzati da un grado di affidabilità e da una durata elevatissima, caratteristiche dovute sia alla mancanza di contatto, che all’assenza di parti in movimento. Occorre inoltre notare come buona parte dei sensori di prossimità attualmente in commercio sia realizzata in tecnologia MEMS (Micro Electro Mechanical Systems), la quale aggiunge alle due precedenti proprietà anche quella delle dimensioni estremamente ridotte;
» presentano tempi di risposta molto rapidi, e possono essere impiegati con range di temperatura estesa (da -40° a 200° C);
» possono essere utilizzati in ambienti “ostili”, in presenza di polvere, olio, o acqua. Alcuni modelli sono inoltre dotati di contenitore protettivo in fluororesina resistente agli agenti chimici;
» poiché il rilevamento dell’oggetto avviene senza il contatto fisico, questo tipo di sensori non comporta alcuna abrasione o danneggiamento in genere dell’oggetto rilevato.
Sensori di prossimità di tipo capacitivo
Questo tipo di sensori sta progressivamente sostituendo i tradizionali comandi di tipo “push-button”, cioè gli interruttori di tipo meccanico: un colpo leggero su una superficie levigata oppure la vicinanza della mano sono in grado di produrre lo stesso effetto del comando meccanico. I sensori di tipo capacitivo si basano sul rilevamento della variazione di capacità elettrica di un condensatore, una delle cui armature è costituita dall’elemento sensibile del sensore, mentre l’altra è rappresentata dall’eventuale presenza di un oggetto nelle immediate vicinanze del sensore. L’approssimarsi di un oggetto viene pertanto percepito dal sensore come una variazione di capacità (più precisamente, quest’ultima varia in modo inversamente proporzionale alla distanza), che causa come conseguenza la commutazione della sua uscita. La variazione di capacità è funzione non solo della distanza dell’oggetto rilevato, ma anche delle sue dimensioni. Rispetto ai sensori di tipo induttivo, quelli capacitivi presentano velocità di commutazione molto più ridotte (dell’ordine di 10-50 commutazioni al secondo). Per contro essi offrono dei significativi vantaggi, tra cui:
» portata nominale fino a circa 20 mm;
» capacità di rilevare anche oggetti non ferromagnetici, a condizione che siano anche solo parzialmente conduttivi (il rilevamento di un oggetto dipende in sostanza dalla sua costante dielettrica). In pratica possono essere rilevati i metalli, vari tipi di resine, acqua, e soprattutto il corpo umano;
» buona immunità nei confronti dei disturbi elettromagnetici.

Figura 1: esempi di sensori di prossimità capacitivi di tipo commerciale.
Sensori di prossimità di tipo induttivo
Questi sensori includono nello stesso contenitore sia l’elemento sensibile che la relativa elettronica di controllo. Il loro principio di funzionamento si basa sulla rilevazione dell’interruzione del campo magnetico (generato da un opportuno circuito comprendente un oscillatore e una bobina) causata dalla vicinanza di un oggetto metallico nella zona in cui è generato il campo. In pratica, la presenza di un oggetto di materiale ferromagnetico nelle immediate vicinanze del sensore provoca una variazione della riluttanza dell’elettromagnete: quando questa variazione supera una determinata soglia, l’uscita del sensore cambia stato. Gli elementi che compongono un sensore di tipo induttivo sono i seguenti: un circuito oscillatore di tipo LC, un circuito per il rilevamento del segnale e un amplificatore. La bobina ha il compito di generare un campo elettromagnetico alternato di alta frequenza che viene emesso dall’elemento sensibile del sensore. Quando un oggetto metallico si porta in prossimità del sensore, vengono generate delle correnti indotte che comportano come effetto una perdita di energia nel circuito oscillante e quindi una diminuzione dell’ampiezza delle oscillazioni. Questa variazione viene misurata dal circuito di rilevamento del segnale, un amplificatore di soglia con isteresi, che a sua volta attiva uno stadio amplificatore finale per azionare il carico, che può essere sia di tipo AC che DC. I carichi di tipo DC prevedono le due configurazioni NPN e PNP. La configurazione NPN è un’uscita a transistor che commuta il polo comune o negativo dell’alimentazione verso il carico, il quale è connesso tra l’uscita del sensore e il positivo dell’alimentazione. La configurazione PNP, invece, è un’uscita a transistor che commuta il positivo dell’alimentazione verso il carico, il quale è connesso tra l’uscita del sensore e il polo comune o negativo dell’alimentazione. La portata nominale dei sensori induttivi è molto ridotta (dell’ordine di qualche millimetro). Per contro, essi sono in grado di sopportare un elevato numero di commutazioni al secondo. In figura 2 e figura 3 sono mostrati alcuni modelli commerciali di sensori di prossimità induttivi, mentre in figura 4 è visibile una tipica applicazione di questo tipo di sensori.

Figura 2: alcuni sensori di prossimità di tipo induttivo.

Figura 3: un sensore di prossimità induttivo di Rockwell.

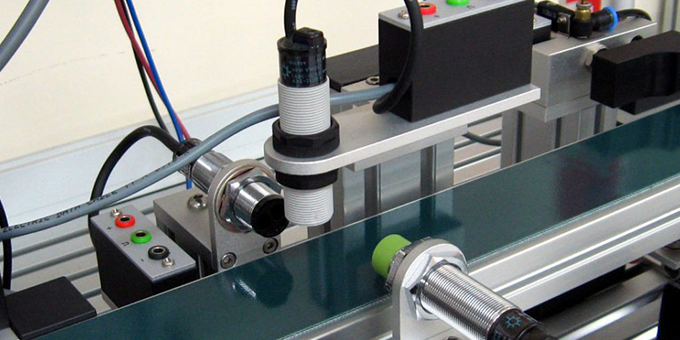
Figura 4: applicazione di un sensore di prossimità induttivo
Sensori di prossimità di tipo magnetico
Questo tipo di sensori si basa su un importante principio scoperto da Edwin Hall nel 1879, quando stava frequentando un dottorato presso la Johns Hopkins University di Baltimora. Hall constatò che ponendo un magnete nelle immediate vicinanze di una sottile lamina d’oro percorsa da un flusso di corrente, con il flusso magnetico posto perpendicolarmente al piano della lamina, si produceva sulla lamina una differenza di potenziale (denominata poi come tensione di Hall) che risultava essere perpendicolare sia al flusso di corrente che al flusso magnetico. Hall fu anche in grado di dimostrare che la tensione prodotta varia linearmente con l’intensità di corrente e con l’intensità del campo magnetico. Dal punto di vista fisico, la tensione di Hall è determinata dalle forze di Lorentz generate dal magnete che, agendo sul flusso di corrente presente sulla superficie della lamina d’oro, disturbano le traiettorie degli elettroni e ne causano una concentrazione su un lato della lamina (e una corrispondente lacuna sul lato opposto). Occorre sottolineare che la tensione di Hall ha un’intensità molto ridotta, dell’ordine di alcune centinaia di microvolt con un campo magnetico applicato pari a un gauss. I sensori di prossimità magnetici possono assumere varie forme, a seconda del particolare tipo di applicazione; ciò che comunque li accomuna è la presenza di un magnete permanente installato sull’oggetto di cui si vuole rilevare la presenza/prossimità. L’uscita di un sensore Hall può essere di tipo on/off oppure lineare; in quest’ultimo caso il suo valore sarà proporzionale alla distanza dell’oggetto dal sensore. I sensori Hall possono inoltre essere sensibili al polo magnetico Nord oppure a quello Sud. Le applicazioni dei sensori a effetto Hall sono molteplici, in particolare possiamo evidenziare le seguenti:
» encoder rotativi: supponiamo che si desideri misurare la velocità angolare di un albero motore, un metodo molto semplice è quello di installare un disco sullo stesso albero con almeno un magnete permanente in posizione fissa. Un circuito rilevatore con sensore Hall verrà poi collocato in modo tale da rilevare il passaggio del magnete all’interno del campo nominale del sensore. Misurando il numero di impulsi per unità di tempo è possibile determinare la velocità angolare (normalmente espressa in Round Per Minute, RPM). Si osservi come, collocando due magneti con polarità opposta, sia possibile determinare anche il verso di rotazione o fase: è sufficiente infatti rilevare la polarità del magnete che per primo passa in prossimità del sensore;
» rilevamento del livello di liquidi e fluidi all’interno di un serbatoio: per questo tipo di applicazione è sufficiente installare un magnete sul corpo galleggiante e uno o più sensori magnetici all’esterno del serbatoio. In base allo stato di ciascun sensore sarà possibile risalire al livello presente nel serbatoio. Questo tipo di sensori è molto adatto per applicazioni dove siano presenti sostanze infiammabili;
» settore automotive: numerose sono le applicazioni in questo settore, tra queste ricordiamo le tre principali che sono il rilevamento della posizione dei sedili (vengono utilizzati uno o più sensori, a seconda del grado di precisione richiesto), il controllo delle cinture di sicurezza (un sensore collocato nell’alloggiamento per la chiusura di ogni cintura consente di determinare se la stessa è stata allacciata o meno, fornendo un’eventuale segnalazione al guidatore) e il rilevamento della posizione del selettore cambio automatico;
» industria aerospaziale: sensori di questo tipo vengono impiegati per il rilevamento della posizione dei carrelli, dei portelli e delle porte scorrevoli. I sensori di prossimità magnetici resistono molto bene anche alle vibrazioni e alle sollecitazioni meccaniche, trovando impiego anche nel settore militare. In figura 5 è mostrata un’immagine del sensore a effetto Hall HAL880 di Micronas, caratterizzato da un’uscita di tipo lineare e dalla possibilità di essere programmato per compensare le tolleranze del circuito in cui viene inserito. I sensori a effetto Hall sono caratterizzati da elevate velocità di commutazione (dell’ordine di 1000 o più commutazioni al secondo) e da una buona affidabilità.

Figura 5: il sensore HAL880 di Micronas.
Sensori di prossimità di tipo ottico
Questi sensori di prossimità hanno solitamente un costo superiore a quello dei sensori induttivi, e circa equivalente a quello dei sensori capacitivi. Esistono sostanzialmente due tipi di sensori di prossimità di tipo ottico, suddivisi in base al tipo di meccanismo che utilizzano per il rilevamento degli oggetti:
» sensori ottici in cui l’oggetto rilevato si interpone nel cammino ottico tra emettitore e ricevitore luminoso (denominati anche sensori a barriera): in questi sensori, l’emettitore e il ricevitore costituiscono due corpi separati e possono essere installati anche a notevoli distanze tra di essi. Una tipica applicazione di questi sensori riguarda il classico circuito contapezzi, che conteggia il numero di oggetti che muovendosi su un nastro trasportatore attraversano il fascio luminoso del sensore. Un’altra applicazione a livello industriale è quella che permette il controllo del corretto riempimento di bottiglie o altri contenitori trasparenti;
» sensori ottici basati sulla riflessione di un fascio luminoso: in questo caso, l’emettitore e il ricevitore sono contenuti all’interno di uno stesso package e orientati verso una direzione comune (leggermente stanza dal corpo del sensore viene poi collocato un elemento riflettente (può essere un riflettore catadiottrico oppure uno specchio), in modo tale che in condizioni normali il ricevitore possa essere illuminato dal fascio di luce emesso dal trasmettitore. Interponendo un oggetto sul cammino tra il sensore e l’elemento riflettente si oscura il ricevitore e pertanto si può rilevare il passaggio dell’oggetto. La portata nominale di questi sensori può raggiungere valori molto elevati, anche dell’ordine di alcune decine di metri. Gli elementi costitutivi di un sensore ottico sono pertanto un emettitore e un ricevitore di luce; la maggior parte di questi sensori utilizza la luce di tipo infrarosso (IR, infra-red) perché questa permette di eliminare molte sorgenti luminose esterne e ambientali che potrebbero disturbare il sensore, rendendolo sensibile solo al fascio luminoso emesso dall’emettitore. L’emettitore è solitamente un LED all’infrarosso, mentre il ricevitore può essere anch’esso un LED oppure un fototransima modulata a una certa frequenza: in questo modo il ricevitore può eliminare tutti i segnali luminosi che non rientrano in questo range di frequenze. In figura 6 e figura 7 sono mostrati alcuni modelli di sensori di prossimità ottici a riflessione; in particolare, in figura 6, si noti la presenza dell’elemento riflettore catadiottrico.

Figura 6: alcuni modelli di sensori ottici.

Figura 7: altri modelli di sensori ottici.
Sensori di prossimità di tipo ultrasonico
I sensori di prossimità di tipo ultrasonico sono basati sull’emissione di impulsi sonori di frequenza elevata (dell’ordine di 40-200 kHz) e permettono di rilevare la presenza di oggetti posti nelle immediate vicinanze, sfruttando l’eco generato dalla riflessione degli ultrasuoni provocata dagli oggetti stessi. Questi sensori, pertanto, sfruttano lo stesso principio fisico impiegato per la realizzazione dei sonar. L’onda sonora viene emessa tramite un opportuno trasduttore elettroacustico di tipo piezoceramico ed è in genere costituita da un treno di impulsi che viaggiano alla velocità del suono. Il ricevitore ha caratteristiche simili all’emettitore e ha il compito di convertire il segnale rilevato in forma elettrica. Rispetto ai sensori induttivi e capacitivi, quelli ultrasonici presentano il vantaggio di consentire il rilevamento di oggetti posti anche a notevole distanza (anche 10 metri) e godono inoltre di un buon livello di immunità ai disturbi elettromagnetici. Rispetto a quelli ottici, inoltre, consentono anche il rilevamento di oggetti trasparenti. Gli svantaggi di questi sensori sono il costo, superiore rispetto a quello di tutti gli altri tipi, e la velocità di commutazione non particolarmente elevata. La figura 8 mostra un sensore di prossimità a ultrasuoni, in cui si può notare la semplicità dell’interfaccia elettrica (due linee per l’alimentazione e una per il segnale rilevato) e la presenza dei due trasduttori emettitore e ricevitore. Tra le numerose applicazioni di questo tipo di sensori ricordiamo il sistema di ausilio al parcheggio delle autovetture, in cui i sensori sono installati solitamente nel corpo.
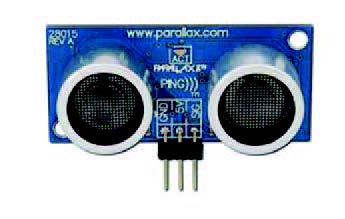
Figura 8: un modello di sensore di prossimità ultrasonico.

Figura 9: il sensore di prossimità M32 di Rechner



Se posso aggiungerei un’altra categoria di sensori, utilizzabili per applicazioni di rilevamento prossimità, è ormai pronta a fare la sua apparizione sulla scena: i sensori radar a onde millimetriche.
L’Uomo ha 5 sensi (o forse qualcuno in più) ma con l’Elettronica si possono realizzare centinaia di sensori diversi. Avete notizie anche sui sensori di odore e profumo?
Quale potrebbe essere un sensore che prima o poi diventerà obsoleto? Non credo esista…per definizione proprio di sensore, oppure qualcuno prima o poi non ci servirà più per qualche strano motivo
Spero non serviranno più i sensori di CO2 e inquinamento… 🙂
I sensori sono fondamentale non solo per gli impianti di automazione industriale (dove in alcuni casi sono chiamati ad operare 24/7), ma anche per le applicazioni IoT.