
L'infrastruttura cloud e il suo ampio set di risorse accessibili a Internet hanno il potenziale per fornire vantaggi significativi ai robot e ai sistemi di automazione. L'articolo considera robot e sistemi di automazione che si basano sui dati o sul codice di una rete per supportare il loro funzionamento, ovvero dove non tutto il rilevamento, il calcolo e la memoria sono integrati in un sistema autonomo. Questa indagine è organizzata attorno a quattro potenziali vantaggi del cloud: 1) Big Data: accesso a librerie di immagini, mappe, traiettorie e dati descrittivi; 2) Cloud Computing: accesso al grid computing parallelo on demand per analisi statistiche, apprendimento e pianificazione del movimento; 3) Apprendimento collettivo dei robot: robot che condividono traiettorie, politiche di controllo e risultati; e 4) Human Computation: uso del crowdsourcing per sfruttare le capacità umane per l'analisi di immagini e video, classificazione, apprendimento e recupero degli errori.
Introduzione
Come illustrato in Figura 1, il cloud ha il potenziale per migliorare un'ampia gamma di robot e sistemi di automazione. Il National Institute of Standards and Technology (NIST) definisce il cloud come "un modello per consentire un accesso on-demand onnipresente, conveniente e di rete a un pool condiviso di risorse configurabili (ad esempio, server, storage, reti, applicazioni e servizi) che possono essere rapidamente forniti e rilasciati con il minimo sforzo di gestione o interazione del fornitore di servizi”. Un esempio sono le capacità di elaborazione testi online offerte da Google Docs. Si possono inviare documenti di Microsoft Word su Internet, ma Google Docs differisce in quanto il documento e software non risiedono localmente. I dati e il codice sono archiviati nel cloud utilizzando server farm remoti con processori e memoria condivisi. Questo è utile perché non ci si deve preoccupare di manutenzione, interruzioni e aggiornamenti software o hardware. Il cloud fornisce anche economie di scala e facilita la condivisione dei dati tra applicazioni e utenti.

Figura 1: Potenziale struttura cloud nella robotica ed automazione
I sistemi Cloud Robot e Automation possono essere ampiamente definiti come segue: "qualsiasi robot o sistema di automazione che si basa su dati o codice da una rete per supportarne il funzionamento, ovvero dove non tutto il rilevamento, il calcolo e la memoria sono integrati in un unico sistema autonomo. Questa definizione intende includere i sistemi futuri e molti sistemi esistenti che coinvolgono la teleoperazione in rete o gruppi in rete di robot mobili come droni o UAVs (Unmanned Aerial Vehicles) o robot di magazzino, così come linee di assemblaggio avanzate, impianti di lavorazione, sistemi domotici e sistemi con calcolo eseguito dall'uomo. A causa della latenza della rete, della qualità variabile del servizio e dei tempi di inattività, i sistemi Cloud Robot and Automation spesso includono una certa capacità di elaborazione locale per risposte a bassa latenza e durante i periodi in cui l'accesso alla rete non è disponibile o inaffidabile.
L'auto a guida autonoma di Google esemplifica l'idea. Indicizza mappe e immagini raccolte e aggiornate da satellite, Streetview e crowdsourcing dal Cloud per facilitare una localizzazione accurata. Un altro esempio è il robot per pallet Kiva Systems per logistica di magazzino. Questi robot comunicano in modalità wireless con un server centrale locale su cui coordinare il routing e condividere gli aggiornamenti rilevati dai cambiamenti nell'ambiente. Questa indagine è organizzata intorno a quattro potenziali benefici dal cloud: 1) Big Data: accesso a librerie remote di immagini, mappe, traiettorie e dati oggetto; 2) Cloud Computing: accesso al grid computing parallelo su richiesta per analisi statistiche, apprendimento e pianificazione del movimento; 3) Apprendimento collettivo dei robot: robot che condividono traiettorie, politiche di controllo e risultati; e 4) Calcolo umano: utilizzando l'accesso in crowdsourcing da remoto e competenze umane per l'analisi delle immagini, la classificazione, l'apprendimento e il ripristino degli errori. Questo sondaggio cita anche esempi in cui il cloud può migliorare i sistemi di robotica e automazione facilitando l'accesso a: a) set di dati, pubblicazioni, modelli, benchmark e strumenti di simulazione; b) concorsi generali di progettazione e sistemi; e c) software open-source.
Big Data
Il cloud può fornire robot e sistemi di automazione con accesso a vaste risorse di dati che non è possibile mantenere nella memoria di bordo. Il termine "Big Data" descrive "dati che superano la capacità di elaborazione dei sistemi di database convenzionali” tra cui immagini, video, mappe, rete in tempo reale, transazioni finanziarie e vaste reti di sensori. Set di dati di grandi dimensioni possono facilitare l'apprendimento automatico, come è stato dimostrato nel contesto della visione artificiale. Su larga scala, set di dati di immagini come ImageNet, classi di dati di oggetti visivi PASCAL e altri sono stati utilizzati per riconoscimento di oggetti e scene. La presa è una sfida persistente nella robotica: determinare il modo ottimale per afferrare un oggetto appena incontrato. Ancora, le risorse possono facilitare l'apprendimento incrementale delle strategie di comprensione confrontando i dati del sensore con i modelli CAD 3D in una banca dati in linea. Esempi di dati includono funzioni per l'immagine 2D, funzioni 3D e nuvole di punti 3D.
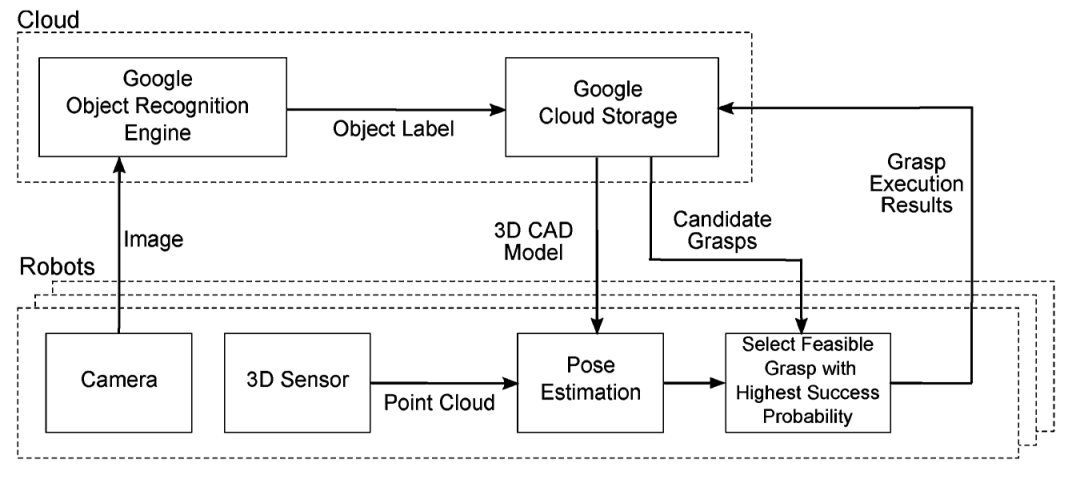
Figura 2: Architettura di sistema per utilizzo Google Lens con robot pick & place
Google Lens è un servizio gratuito di riconoscimento delle immagini per dispositivi mobili. Tale servizio è stato incorporato in un sistema basato su cloud per la presa dei robot come illustrato in Figura 2. Una sfida di ricerca è definire formati multipiattaforma per rappresentare i dati. Mentre i dati provenienti dai sensori, come immagini e nuvole di punti, hanno un piccolo numero di formati ampiamente utilizzati, anche dati relativamente semplici come le traiettorie non hanno ancora standard comuni ma la ricerca è in corso. Altra sfida è lavorare con rappresentazioni sparse per un'efficiente trasmissione di dati, ad esempio algoritmi per la pianificazione del movimento sparso per sistemi robotici e di automazione. Sono spesso grandi set di dati raccolti da fonti distribuite "sporche" con dati errati, duplicati o danneggiati, come i dati di posizione 3D raccolti durante la calibrazione del robot. In generale, sono necessari nuovi approcci che siano robusti ai dati sporchi. Questo è un hot topic attuale della ricerca.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2949 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Le comunicazioni radio di nuova generazione: il Software Defined Radio

In che modo le tecnologie di Test & Measurements guidano il controllo qualità
Droni e normativa: chi può pilotare un drone, cosa si può e cosa non si può fare

Soluzioni audio per i propri progetti

I sistemi display 3D autostereoscopici
