Sfruttando l’uscita PWM generata da un PIC è possibile realizzare un alimentatore boost seguendo lo schema di figura 2.
Alimentatore Boost
L’uscita PWM pilota Q1 il quale entrando in conduzione porta a massa L1. In questa fase L1 si carica con la corrente proveniente da Vcc.
Nella fase successiva, quando il segnale PWM è a livello basso, Q1 è interdetto e l’energia accumulata in L1 fluisce attraverso D1 e viene trasmessa a C2.
Per il dimensionamento del circuito è necessario determinare innanzitutto il duty cycle D del segnale PWM in base al rapporto Vout/Vin secondo la relazione:
Vout/Vin=1/(1-D)
L1 viene invece dimensionata in base alla corrente richiesta dal carico, dalla frequenza e dal duty cycle. La relazione è la seguente:
L1=[VinD(1-D)T]/2Io
Dove D è il duty cycle, T il periodo di commutazione del segnale PWM e Io la corrente di uscita. Il duty cycle non dovrà superare il 75% e la frequenza del segnale PWM dovrà essere compresa tra 10KHz e 100KHz.
Una volta dimensionata l’induttanza L1, è possibile ricavare il ripple dell’intero sistema dato dalla relazione:
Iripple=VinDT/L1
Schema elettrico
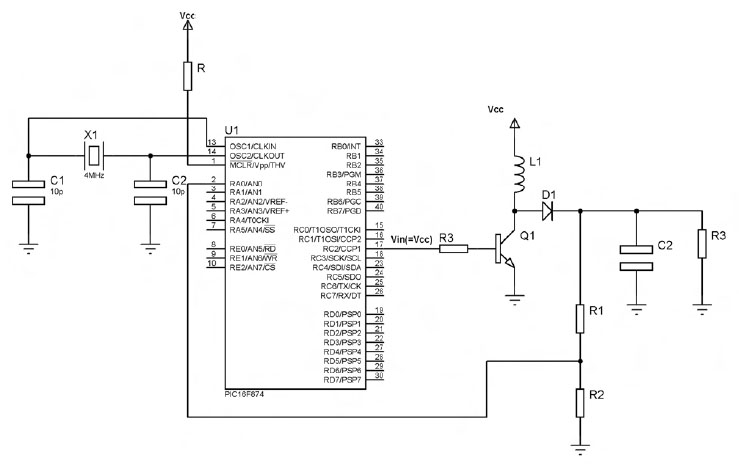
Alimentatore boost
La corrente di ripple non dovrà superare la corrente di saturazione dell’induttore, in tal caso sarà necessario ridimensionare il sistema scegliendo un valore maggiore per L1. Il duty cycle del segnale PWM viene variato dal microcontrollore al fine di mantenere costante la tensione di uscita. Per fare questo viene implementato un controllore PID firmware che legge una partizione della tensione di uscita attraverso il partitore R1, R2 e l’ingresso analogico AN0 del PIC e regola il duty cycle del segnale PWM.


Bel progetto!
Questo è uno schemino semplice semplice, per progetti più interessanti di alimentatori switching, ci sono delle applicazioni fatte con i DSPIC, ovviamente in casa Microchip Tech.
Però una buona base da dove partire 😉
Si, lo schema è semplice ma è allo stesso tempo la base degli switching di tipo boost (tensione di uscita maggiore di quella di ingresso). C’è l’induttore, dal quale si evince l’importanza della frequenza, e la retroazione tramite partitore resistivo e a/d converter, con il fondamentale lavoro del diodo D1 e del condensatore C2, in più è tutto gestito da un microcontroller.
Comprendere a fondo un circuito del genere è già un importante passo nel mondo dell’elettronica (e non mi riferisco solo agli hobbisti)
concordo in pieno!
Il PID con il micro lo rende veramente interessante per la sua semplicità di gestione. L1, Q1 e D1 di per se sono le parti principali di un boost. Uno schema simile con qualche accorgimento può essere fatto sostituendo Q1 con un mosfet, almeno credo…
Certamente si, lo schema è di riferimento, per gli switching in genere si utilizzano i Mosfet, più performanti a partire dall’RDSon molto bassa 😉
Gli integrati di nuova generazione, come il LM2577 della Texas Instruments, si basano su questo principio. Con questo circuito è possibile realizzare un alimentatore regolabile tramite GUI. Una considerazione fondamentale va fatta al diodo, necessita che sia con bassa tensione di soglia e alta velocità di commutazione; uno Schottky.
In passato ne ho costruito uno, che generava una tensione fissa ala variare del carico (variazioni di pochi mA), utilizzando un 12F675 programmato in ASM.
Bell’articolo, sono quelli che preferisco 🙂