Avere una alimentazione stabile di elevata qualità, poco rumorosa e capace di erogare picchi di corrente quando richiesto, senza uscire dai limiti di specifica non è certo una nuova esigenza.
Questo è da sempre il primo requisito di ogni progetto elettronico, si tratti di un circuito integrato, una board o un sistema. Le caratteristiche dei circuiti logici apparsi negli ultimi anni rendono però qualità e performance del sistema di alimentazione particolarmente critici e bisognosi di attenta progettazione. Le tensioni di alimentazione sono andate gradualmente riducendosi per limitare la potenza dissipata e rispettare le caratteristiche elettriche di strutture integrate sempre più piccole. Siamo quindi passati in pochi anni dai classici 5V ad 1.2V ed ormai anche 1V (vedi tabella 1).
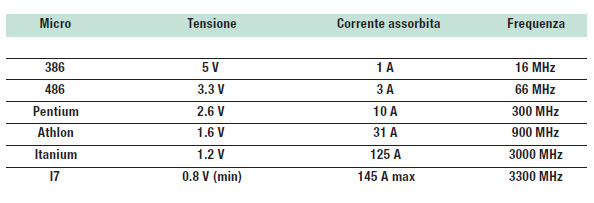
Tabella 1:evoluzione delle caratteristiche di alimentazione e frequenze di lavoro.
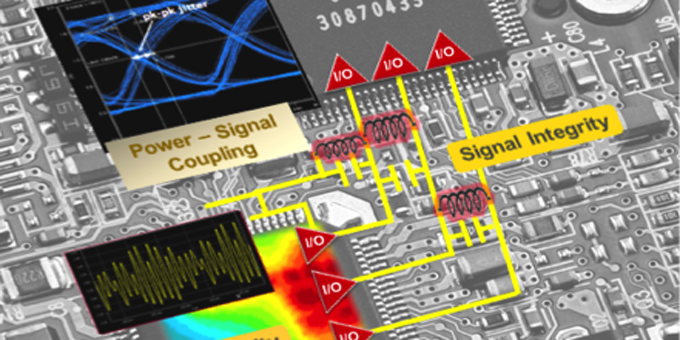
Le tolleranze ammesse sono spesso passate dal tradizionale +/- 10% a +/- 5%, parallelamente con un sensibile aumento delle correnti assorbite e delle frequenze di commutazione, quindi della banda passante richiesta al sistema di alimentazione. Il margine di tensione si è cosi ridotto da 500 mV a 50 mV. Performance un tempo considerati del secondo ordine nella maggior parte delle applicazioni, quali i livelli di emissione elettromagnetica, affidabilità nel medio e lungo periodo, vita media del prodotto, entrano sempre più nella lista dei parametri di progetto, al pari delle specifiche tecniche che garantiscono la funzionalità desiderata. Questo è un effetto della massiccia pervasività dell’elettronica e delle tecnologie digitali in particolare nel mondo moderno, ma anche della crescente concorrenza e pressione su prezzi, time to market, percentuali di mercato acquisite, da difendere ed espandere. Per questo insieme di ragioni, il concetto di Power Integrity si è molto sviluppato e diffuso, uscendo dal mondo dell’hardware per mainframe e server dove era originariamente nato, per fondersi con altri paradigmi quali Signal Integrity, Design for Manufacturing, Design for Reliability, Compatibilità elettromagnetica. Questa fusione crea la moderna metodologia di progettazione ed industrializzazione di un prodotto, non più a compartimenti stagni, ma sempre più integrata ed in grado di tenere conto di ogni aspetto e conseguenza delle specifiche e delle caratteristiche, un processo di sviluppo volto a porre tra le mani del cliente un prodotto che lo soddisfi ed inviti ad acquistare da noi anche in futuro (fidelizzazione del cliente). Entriamo quindi nel mondo Power Integrity, partendo dall’analisi delle conseguenze di una alimentazione non ottimale, rivisiteremo la struttura tipica di ogni sistema di alimentazione (nel seguito PDN, da Power Delivery Network), esamineremo gli ‘attrezzi’ a nostra disposizione per realizzare una PDN efficace. Vedremo come l’argomento sia in realtà assai più complesso (ed interessante) di come possa sembrare a prima vista. L’ambiente di applicazione che assumiamo come riferimento è costituito dalle applicazioni digitali, con logiche programmabili, microprocessori, microcontrollori, con particolare attenzione alla tecnologia CMOS.
EFFETTI DELLE FLUTTUAZIONI DI ALIMENTAZIONE SU CIRCUITI LOGICI CMOS
Fluttuazioni più o meno rapide della tensione di alimentazione hanno varie conseguenze negative sul funzionamento dei circuiti logici, CMOS in particolare:
- Violazione di temporizzazioni critiche (Timing Failure).
- Jitter
- Incremento del rumore nel sistema ed emissioni elettromagnetiche (EMI).
- Erosione dell’affidabilità elettrica nel tempo. Ogni fluttuazione è generalmente considerata ‘rumore’ sulle alimentazioni, rappresentando un segnale elettrico più o meno casuale, sovrapposto alla tensione continua che vorremmo idealmente ottenere. Esaminiamone gli effetti in maggior dettaglio.
VIOLAZIONE DI TEMPORIZZAZIONI CRITICHE
Osservando la figura 1, tratta dal datasheet di un inverter 74HC04, notiamo come tutti i parametri temporali di una sia pur semplice funzione logica, dipendano dalla tensione di alimentazione (oltre che dalla temperatura).
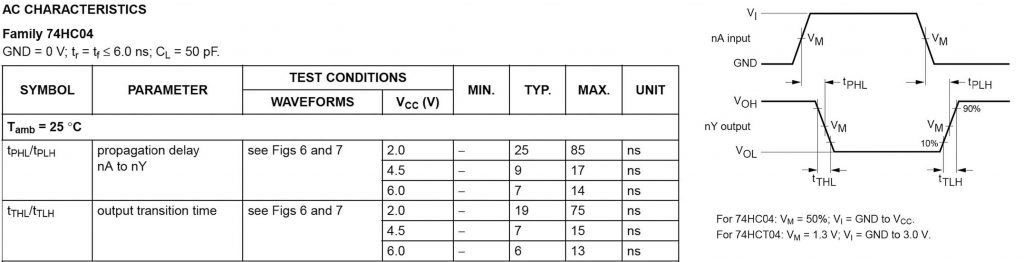
Figura 1: dipendenza dei parametri temporali dalla tensione di alimentazione (da : 74HC/HCT04 Hex inverter Datasheet, Philips Semiconductors, 1993).
Questo significa che anche la frequenza massima di operazione di un sistema complesso, composto da un gran numero di funzioni elementari, dipenderà dal valore di tensione di alimentazione. Possiamo notare come la dipendenza non sia in realtà molto accentuata, per variazioni di alimentazione contenute. Tuttavia questo fenomeno diventa importante per i dispositivi a bassa tensione e dove questi siano spinti vicino al limite di funzionamento. Se la PDN non è in grado di soddisfare picchi di consumo rapidi, la situazione mostrata in figura 2 può risultare in violazioni del tempo di commutazione o propagazione minimo richiesto dal circuito ed errori logici nella circuiteria della nostra applicazione (errori di setup time).
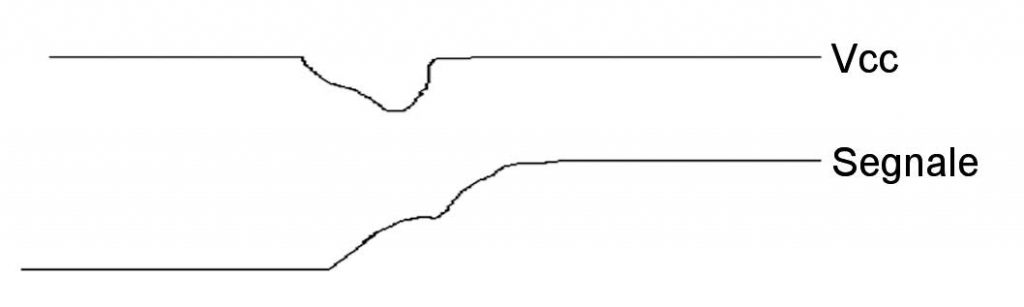
Figura 2: effetti sulle commutazioni logiche del Rumore su alimentazione.
In altre parole, il dato corretto potrebbe non essere pronto in tempo. Ad aggravare il fatto, tali errori possono facilmente avere comportamenti casuali e poco ripetitivi, ad esempio a causa di una dipendenza dal dato trasmesso, con conseguenti grandi difficoltà nella localizzazione del difetto. E’ bene ricordare che caratteristica tipica dei circuiti logici CMOS è presentare consumo di corrente prevalentemente in coincidenza con le transizioni del clock di sistema. Questo va ad aggiungersi ad un consumo statico di base. La PDN va quindi dimensionata in modo che soddisfi sia il consumo statico che le richieste transitorie di corrente con la velocità richiesta.
JITTER
Definiamo come Jitter l’incertezza temporale di una commutazione logica, vedi figura 3. Poiché abbiamo visto che la velocità di operazione dipende dal valore della tensione di alimentazione, una situazione come quella rappresentata in figura 2 comporterà anche un leggero spostamento dell’istante di transizione, proporzionale alla variazione di tensione, come visibile in figura 3.
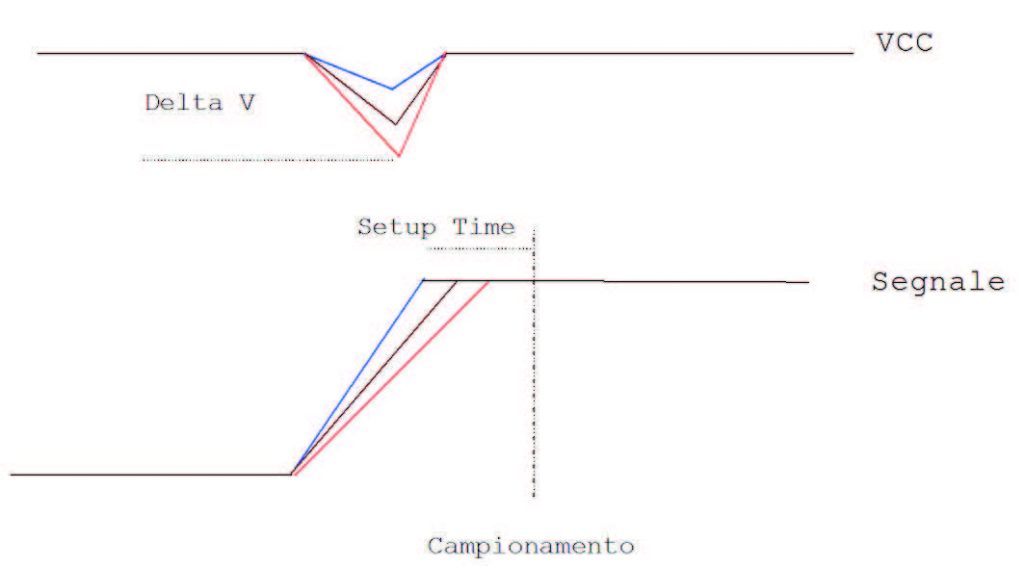
Figura 3: jitter causato da fluttuazioni sulla tensione di alimentazione.
Nella figura vediamo che un ritardo nella transizione può erodere il margine verso l’istante di campionamento, portando ad una violazione del setup time dei circuiti a valle. Un jitter più o meno importante è associato ad ogni transizione logica ed è, oltre un certo limite, ineliminabile. La sua presenza non dipende solo dalla fluttuazione dell’alimentazione ma anche da fenomeni fisici intrinseci quale il rumore termico, il rumore elettrico dovuto a crosstalks o interferenze elettromagnetiche, riflessioni su linee di trasmissione non perfettamente terminate. Una PDN non correttamente dimensionata va quindi a peggiorare una situazione preesistente. Di nuovo, le frequenze di operazione ed i margini del nostro sistema determinano quanto il fenonomeno possa essere critico e quanto le conseguenze sui circuiti a valle siano tollerabili o meno. Non dimentichiamo che ‘margini operativi’ significa inevitabilemente in qualche misura, maggiore costo della nostra applicazione. Subiamo quindi pressioni per non largheggiare in alcun ambito.
RUMORE NEL SISTEMA ED EMISSIONI ELETTROMAGNETICHE
Le connessioni di alimentazione e massa sono diffuse in tutta la board e si prestano quindi molto bene a diffondere il rumore tra tutti i componenti e tutte le connessioni della scheda. Filtrare il rumore presente sulla PDN è quindi una fondamentale precauzione per prevenirne la diffusione in tutto il sistema ed oltre. Tendiamo ad identificare il rumore con segnali in tensione rapidamente variabili ma occorre tenere presente che fisicamente sono le correnti variabili ad emettere radiazioni elettromagnetiche, non direttamente le tensioni. Il “rumore” in tensione che possiamo visualizzare misurare con un oscilloscopio o un analizzatore di spettro lavora come un generatore che impone la circolazione di correnti ad alta frequenza, in tutti i conduttori componenti il sistema, PCB layers, tracce, cavi di connessione esterni. Il rumore in tensione può inoltre propagarsi in forma di tensioni indotte in altri conduttori per accoppiamento capacitivo. Tre principali meccanismi di Emissione Elettromagnetica da una board possono essere identificati:
- Emissione diretta dalle tracce del circuito stampato
- Emissione dai lati di boards multistrato
- Emissione dai cavi di ingresso/uscita (alimentazione e segnali)
L’emissione diretta non è normalmente il meccanismo prevalente, sia per le precauzioni di progettazione (Power Integrity è tra queste), sia perché l’efficienza di trasmissione diminuisce molto, quando le dimensioni fisiche delle strutture irradianti sono significativamente più piccole della lunghezza d’onda. Su schede di ridotte dimensioni, rischiamo quindi di avere problemi solo a frequenze molto elevate, dove le lunghezze d’onda sono dell’ordine dei centimetri o decine di centimetri. Notare che va considerata la lunghezza d’onda nel dielettrico, non in aria. Bisogna comunque tenere presente che ogni percorso di corrente sul PCB è una potenziale antenna ad anello. Una situazione tipica è schematizzata in figura 4 che rappresenta una porta logica (driver) che invia un impulso ad un ingresso logico sulla stessa board (receiver).
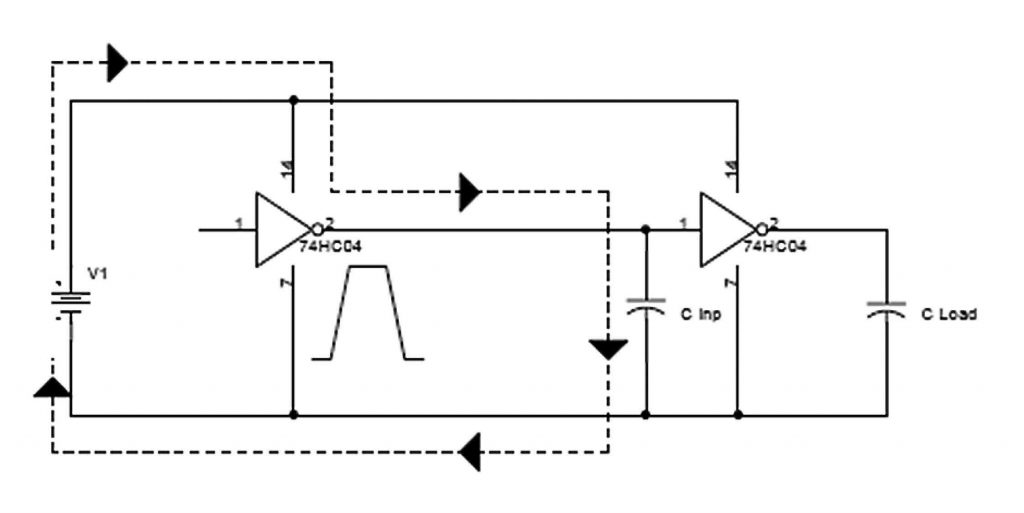
Figura 4: anelli di corrente su PCB.
Possiamo ben immaginare quanti percorsi simili vi siano in qualsiasi PCB. In una board multistrato, i piani paralleli di massa ed alimentazioni formano inoltre una cavità risonante, capace di lavorare anche come involontaria antenna (patch antenna). L’emissione dallo spessore della board può causare il superamento dei livelli massimi di emissione con conseguente fallimento dei test di compatibilità elettromagnetica, qualora contenitori o altre strutture conduttive vengano eccitate dal campo elettromagnetico in tal modo generato. Le emissioni dai cavi sono spesso le sorgenti più importanti e possono condurre a violazioni dei limiti. I cavi infatti possono facilmente avere lunghezze per le quali si comportano come discrete antenne. Il rumore presente sulla board, sulla PDN in particolare, agisce come una sorgente di eccitazione a radiofrequenza delle involontarie antenne cosi create. Saper riconoscere le strutture fisiche in grado di comportarsi come antenne è quindi molto utile per prevenire emissioni eccessive ed eccessiva suscettibilità del sistema (vedi Rif.2). Ridurre il rumore ad alta frequenza sulla board, cioè la sorgente di eccitazione di tali antenne, è la contromisura immediatamente successiva da prendere per passare i test EMC alla prima sessione.
EROSIONE DELL’AFFIDABILITÀ
Sovratensioni, in qualsiasi modo generate, qualora ripetitive e frequenti possono avere un effetto sull’affidabilità’ a lungo termine dei moderni circuiti integrati che in qualche caso hanno una tolleranza molto bassa da questo punto di vista.
STRUTTURA DI UN SISTEMA DI ALIMENTAZIONE
(Power Delivery Network)
Nella figura 5 possiamo vedere lo schema a blocchi tipico di ogni PDN per applicazioni digitali (e non). Si tratta di una struttura multi stadio, dove riconosciamo sulla sinistra una schematizzazione del regolatore di tensione locale come sorgente di tensione ideale (metteremo presto in discussione questa semplificazione). Troviamo poi quello che viene definito ‘bulk decoupling’, uno o più condensatori di elevata capacità che lavorano come volano per gli assorbimenti, un condensatore che rende conto della capacità distribuita dei piani di alimentazione, il decoupling locale dei singoli circuiti integrati ed il carico finale, costituito dagli integrati stessi. Questi ultimi possono essere rappresentati come generatori di correnti triangolari, rendendo conto del consumo dinamico del circuito integrato CMOS dovuto alle transizioni del clock o delle uscite, caricando e scaricando le capacità interne ed esterne. Se lo schema elettrico reale della PDN fosse realmente quello di figura 5, non avremmo alcun problema nel supportare tutti gli integrati logici presenti sul nostro PCB, per quanto rapide possano essere le variazioni di consumo che questi impongono alle loro frequenze operative.
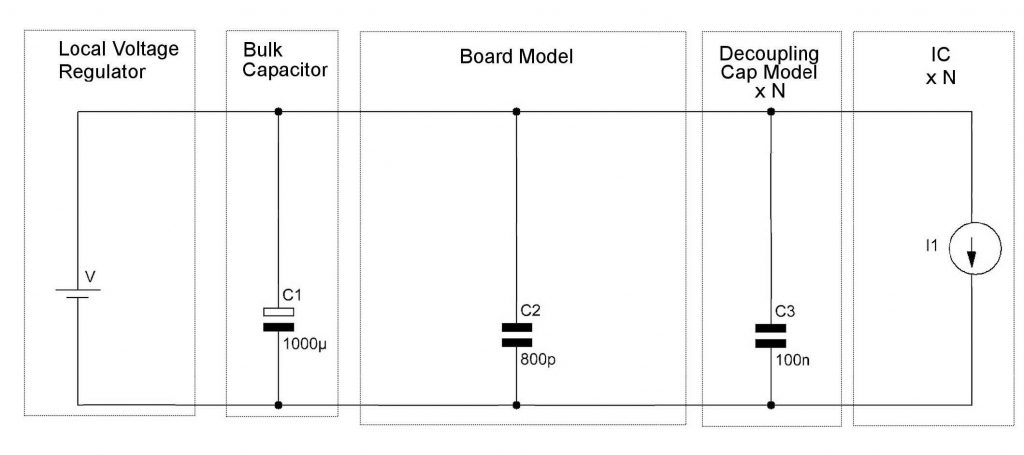
Figura 5: schema a blocchi di una generica Power Distribution Network.
Purtroppo la situazione viene notevolmente deteriorata dalla presenza dei parametri parassiti associati ad ogni componente reale, PCB compreso. Uno schema elettrico assai più vicino al vero sarà quindi come da figura 6, dove i principali parametri parassiti sono rappresentati. Sono opportune alcune considerazioni. Il regolatore di tensione locale non è piùuna sorgente ideale con velocità di risposta e corrente erogabile infinite, ma gli vengono associati la resistenza ed induttanza interna. Per semplicità queste inglobano anche i collegamenti esterni, senza rappresentarli individualmente. La resistenza in serie ai condensatori rappresenta le perdite ohmiche del componente (ESR), dovute ai conduttori interni ed ai terminali di collegamento alla board. Analogamente, l’induttore in serie ad ogni condensatore rappresenta l’induttanza dei collegamenti e dei percorsi di corrente interni al condensatore (ESL). L’induttanza in figura 6 rappresenta anche l’eventuale via di connessione ai piani.
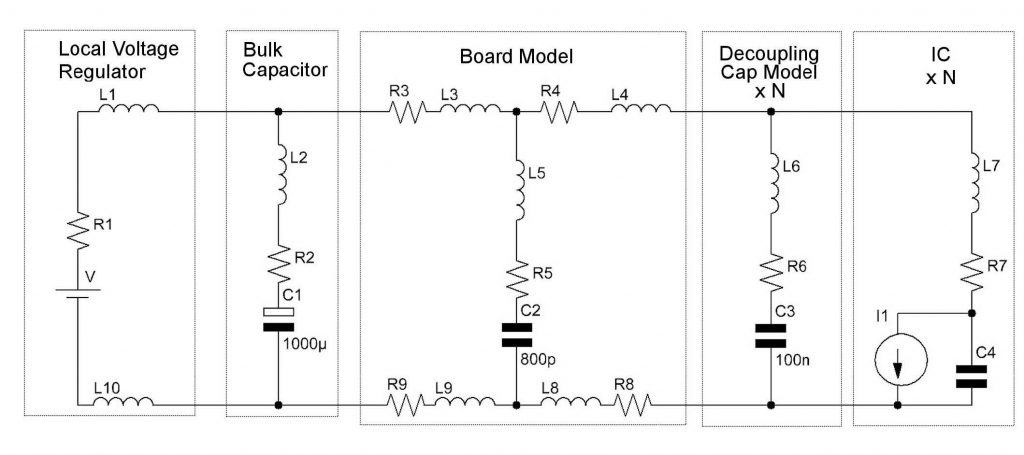
Figura 6: schema reale di una PDN
Il condensatore equivalente che rappresenta i piani di alimentazione del circuito stampato costituisce un componente di qualità tipicamente elevata, funzione del dielettrico utilizzato. Si possono quindi considerare nulle R5 ed L5. A frequenze inferiori ad 1 GHz trascurare la resistenza ohmica dei piani comporta un piccolo errore, quindi anche R3, R4, R8, R9 possono essere considerate nulle. Le semplificazioni introdotte sono visibili in figura 7.
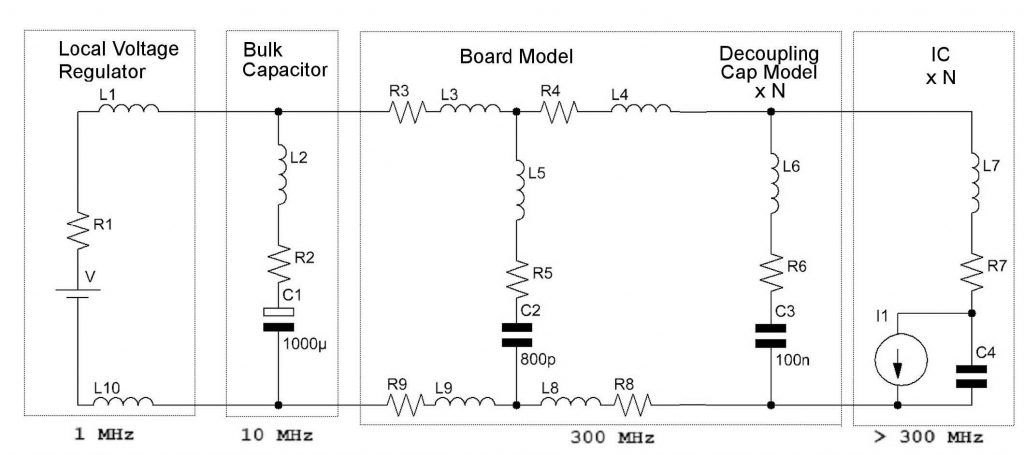
Figura 7: frequenze di lavoro degli stadi di una PDN.
I circuiti integrati sono rappresentati dalla loro capacità equivalente interna, in parallelo ad un generatore di corrente impulsiva, come detto. Le resistenze e induttanze in serie rendono conto dei fili di connessione tra il chip di silicio ed i terminali esterni (die bonding). Notiamo le resistenze ed induttanze sul percorso di ritorno tra carico (IC) e regolatore. Questo modello rende bene il concetto ‘la terra è dove crescono patate e carote, non altro’! È cosi evidente che non esiste un percorso di ritorno ideale, equipotenziale ad impedenza nulla, una sia pur piccola differenza di tensione esiste tra ogni coppia di nodi di ‘massa’. A bassa frequenza l’impedenza di una connessione è dominata dalla resistenza ohmica. Al crescere della frequenza, cresce l’impedenza ohmica a causa dell’effetto pelle, ma soprattutto l’induttanza inizia a dominare. Ne segue che a bassa frequenza le correnti tendono a circolare nei percorsi a minima resistenza, invece ad alta frequenza nei percorsi a minore induttanza, molto meno evidenti. Questo spiega perché lo stadio della PDN più vicino al carico, il decoupling locale, abbia la maggiore efficienza nell’erogare velocemente la carica elettrica richiesta durante i transitori, evitando quindi eccessive fluttuazioni nella tensione. Il ripristino della carica dei condensatori di decoupling e richieste di corrente a profilo meno rapido vengono via via soddisfatte dagli altri stadi, fino al regolatore di tensione, sorgente principale. È possibile quindi associare ad ogni stadio una gamma di frequenza di lavoro utile, come visibile in figura 7. I limiti in frequenza sono indicativi, ma abbastanza attendibili. I valori esatti dipendono dai dettagli della singola implementazione. Da notare come al di sopra di qualche centinaio di megahertz solo il decoupling on-chip (e/o on package) sia realmente efficace. Tutta la discussione e modellizzazione fino a questo punto svolta ha un limite importante di cui occorre tener conto lavorando ad alta frequenza o con fronti ripidi. I modelli a parametri concentrati sono validi fin che le loro dimensioni fisiche sono molto inferiori alle lunghezze d’onda in gioco (consideriamo tipicamente un ventesimo della lunghezza d’onda della massima frequenza in gioco). Fenomeni legati alla propagazione di onde non sono catturati e rappresentati. Le cavità risonanti create dai piani dei PCB sono sede di risonanze a frequenze maggiori di 300 MHz (circa), risonanze che possono creare iniezione di rumore ed emissioni elettromagnetiche. Diventano un problema se le risonanze sono eccitate, cioè se esiste nella nostra board sovrapposizione tra frequenze generate dalle operazioni del circuito con le frequenze di risonanza.
LA “CASSETTA DEGLI ATTREZZI”
Diamo un’occhiata ai componenti che abbiamo a disposizione per realizzare le nostre PDN. Il primo componente è ovviamente il Regolatore di tensione, lineare o a commutazione come spesso usato oggi. Principale richiesta a tale modulo è la fornitura della corrente continua richiesta, con bassa ondulazione in tensione, buona regolazione verso variazioni dinamiche di carico e buona efficienza per ridurre il consumo. Dal punto di vista Power Integrity non ci sono speciali considerazioni da fare qui. La limitata banda passante del modulo renderà comunque necessario aggiungere altri componenti per soddisfare le richieste in tutta la banda di funzionamento previste. Il circuito stampato va considerato a tutti gli effetti un componente, elemento da progettare con cura. Idealmente, una coppia di piani andrebbe riservata ad ogni alimentazione distinta in DC. Accettabile compromesso è il partizionamento di uno o più layers per alloggiare tutte le tensioni in isole dedicate, affacciate ad un layer continuo di massa (o per meglio dire, percorso di ritorno). Lo spessore del dielettrico tra layer di alimentazione e layer di massa va scelto minore possibile, in modo da rendere massima la capacità distribuita risultante e minima l'nduttanza parassita dei percorsi alimentazione/ritorno. La distribuzione di alimentazione con piani interi (layer) presenta un interessante dilemma da risolvere caso per caso. I vantaggi sono nella bassa induttanza e quindi buone performance ad alta frequenza delle connessioni di alimentazione, oltre che nella presenza dell’ottimo condensatore formato dalla struttura, come visto. Lo svantaggio, oltre al costo del PCB, consiste nella struttura risonante creata dai piani affacciati. Boards operanti ad alta frequenza e/o con molti componenti digitali, quindi con molti punti da collegare, rendono indispensabile la distribuzione con piano dedicati. Per capire se le risonanze sono un problema, occorre avere un’idea del comportamento in frequenza della nostra applicazione. Occorre calcolare le frequenze di risonanza della board in funzione delle sue dimensioni fisiche e verificare se sono presenti armoniche nella medesima gamma di frequenze. Ritorneremo sull’argomento nella seconda parte. I condensatori svolgono due funzioni nella progettazione di PDN, decoupling e bypass. Questi termini sono spesso usati come sinonimi, ma esiste una sottile differenza che occorre conoscere.
DECOUPLING
Forniscono una sorgente locale di carica per soddisfare picchi di consumo in modo da evitare che sia l’alimentazione principale a doversene occupare. Quindi “disaccoppiano” l’assorbimento di corrente locale dall’alimentatore principale, da cui il nome.
BYPASS
Filtrano localmente rumore ad alta frequenza, offrendo una via di ritorno a bassa impedenza e impedendone o quanto meno, riducendone notevolmente la propagazione nel sistema. Quindi “deviano” le componenti ad alta frequenza dal propagarsi nell’applicazione, da cui il nome “bypass”. Possiamo identificare due gruppi di condensatori, Bulk Decoupling e Decoupling Locale (che tipicamente lavora anche come bypass). Abbiamo visto in figura 6 che un condensatore reale presenta una induttanza serie, per quanto ridotta. Questa induttanza riduce l’efficacia del condensatore quando chiamato a rapide erogazioni di carica, presentando una impedenza proporzionale alla frequenza (vedi formulario). In tutti i tipi di decoupling quindi, particolare cura va riservata alla riduzione dell’induttanza complessiva. A questo proposito, il layout sul PCB è fondamentale. Vediamo in figura 10 vari layout possibili, con le rispettive induttanze associate, eloquente guida circa la scelta da adottare. Quando possibile, connettere le piazzole del condensatore ai layer interni usando vias multiple è un’altra buona idea per abbattere l’induttanza parassita. Le induttanze associate alle vias sono infatti in parallelo tra loro, risultando un una induttanza totale pari a quella della singola via diviso per il numero di vias usate. In figura 8 possiamo vedere l’andamento in frequenza dell’impedenza presentata da un condensatore ceramico da 100 nF, valore molto popolare nel decoupling.
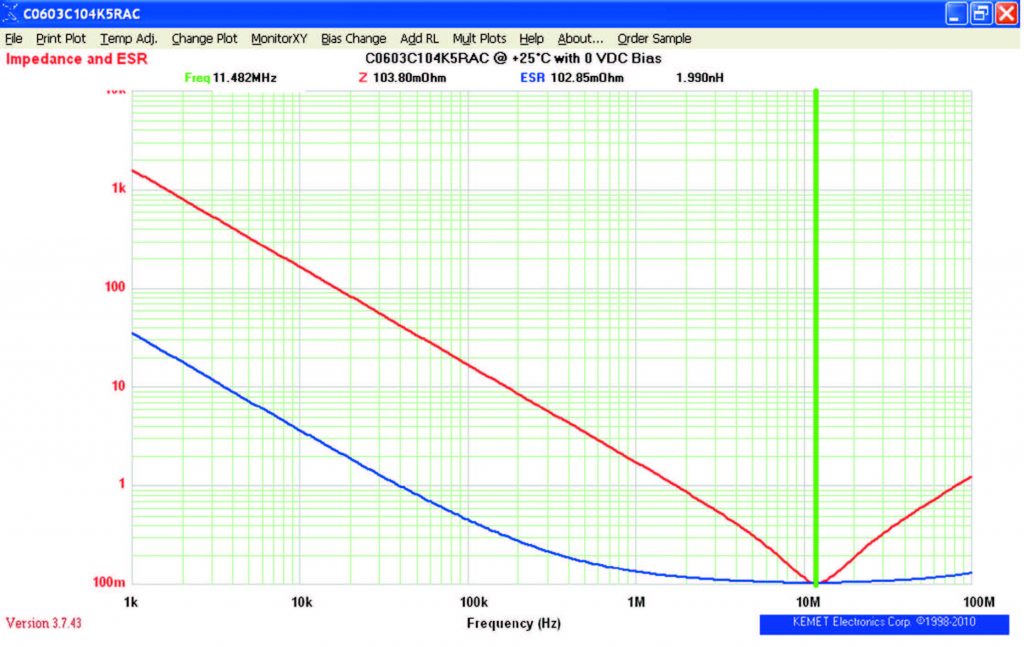
Figura 8: impedenza di un condensatore reale (KEMET SPICE).
La figura è ottenuta con una versione semplificata del simulatore SPICE ottenibile gratuitamente all’indirizzo web in Rif. 1. Il grafico considera il solo condensatore, senza tener conto dell’induttanza parassita dovuta alle connessioni del pcb. Vediamo come il componente si comporti come condensatore fino alla frequenza di risonanza serie (retta con pendenza di 20 dB per decade in scala logaritmica), per assumere poi un comportamento induttivo. Per quanto detto, l’induttanza parassita (ESL) è un parametro fondamentale per la scelta del condensatore. A parità di tecnologia (es. ceramici), il modo più semplice ed economico per ridurre la ESL consiste nello scegliere il package più piccolo possibile, parliamo ovviamente di componenti smd. Componenti assiali hanno induttanze intrinsecamente maggiori a causa dei terminali ed il loro uso in questo campo è sostanzialmente estinto. È possibile ottenere ESL molto inferiori, pari a circa il 30% dei componenti standard, usando condensatori con ‘reverse form factor’, cioè più larghi che lunghi (ad es. 0508 invece che 0805). Purtroppo risultano più costosi e meno reperibili degli standard. I condensatori ‘bulk’ sono tipicamente di elevato valore capacitivo, elettrolitici al tantalio o alluminio. Il loro posizionamento ideale è in prossimità del regolatore di tensione o connettore di alimentazione. In questo caso l’induttanza di collegamento tipicamente non costituisce un problema, date le intrinsecamente minori performance in frequenza. Due diverse strategie principali sono possibili per i decoupling locali. La prima strategia consiste nel montarli il più vicino possibile ai pin di alimentazione degli integrati che si vogliono filtrare. La seconda strategia possibile consiste nel montarli distribuiti in una griglia semi-regolare che copra l’area critica della board (dove sono concentrate le logiche). La prima strategia minimizza il numero di condensatori, la seconda permette un profilo di impedenza più regolare ed un miglior controllo delle risonanze di cavità. Riprenderemo nella seconda parte la discussione sulla migliore strategia da utilizzare.
Un altro fenomeno da considerare nella progettazione della PDN è l’antirisonanza, gamme di frequenza dove aumenta, anche notevolmente, l’impedenza complessiva. Questi picchi nel profilo di impedenza sono dovuti alla combinazione dell’impedenza in funzione della frequenza di condensatori di valore diverso in parallelo (vedi figura 9). Semplificando un po’ il discorso, possiamo dire che i profili di impedenza a V dei singoli condensatori si sovrappongono lasciando un picco nella gamma intermedia tra le frequenze di risonanza serie dei componenti. Il picco ha valore più elevato rispetto ai singoli componenti nella stessa gamma e questo può degradare l’efficacia della PDN qualora vi siano frequenze operative coincidenti od in prossimità della frequenza propria del picco. Lo studio di questo fenomeno non può prescindere dai parametri elettrici distribuiti del pcb e non può essere svolto esaustivamente in un ambiente semplificato quale quello introdotto, comunque utile per farsi rapidamente un’idea del fenomeno e del peso reciproco dei vari parametri. Riprenderemo l’argomento nel prossimo capitolo. Per ridurre gli effetti delle antirisonanze, oltre a curare come detto l’induttanza parassita, dobbiamo evitare di montare in parallelo valori molto diversi tra loro (come il caso estremo intenzionalmente riportato in figura 9, 100 nF in parallelo a 180 pF). Un accettabile compromesso è l’uso di almeno un valore per decade.
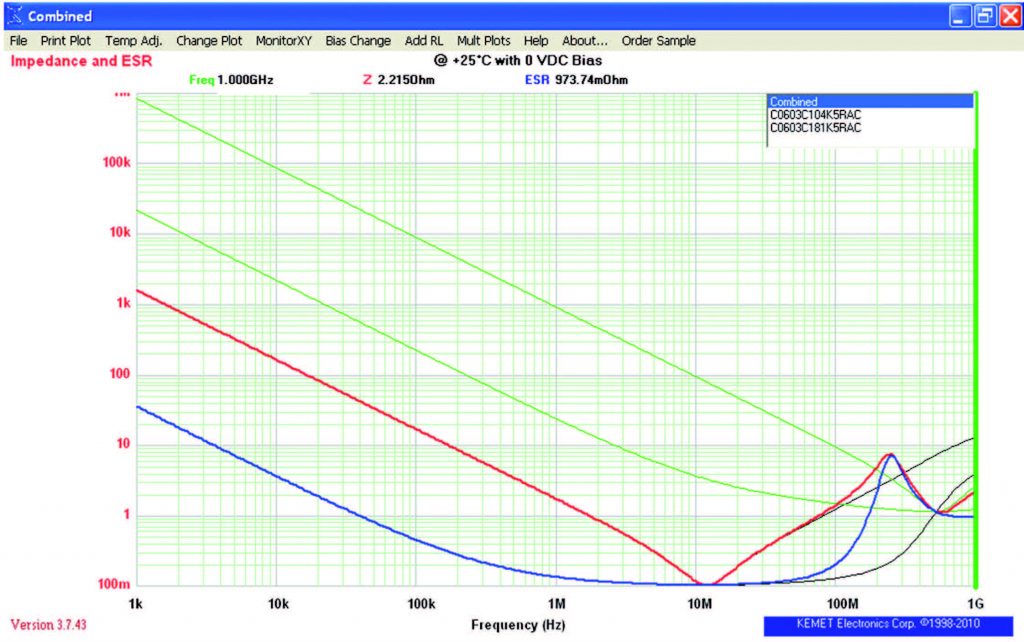
Figura 9: impedenza di due condensatori in parallelo (180 pF + 100 nF)
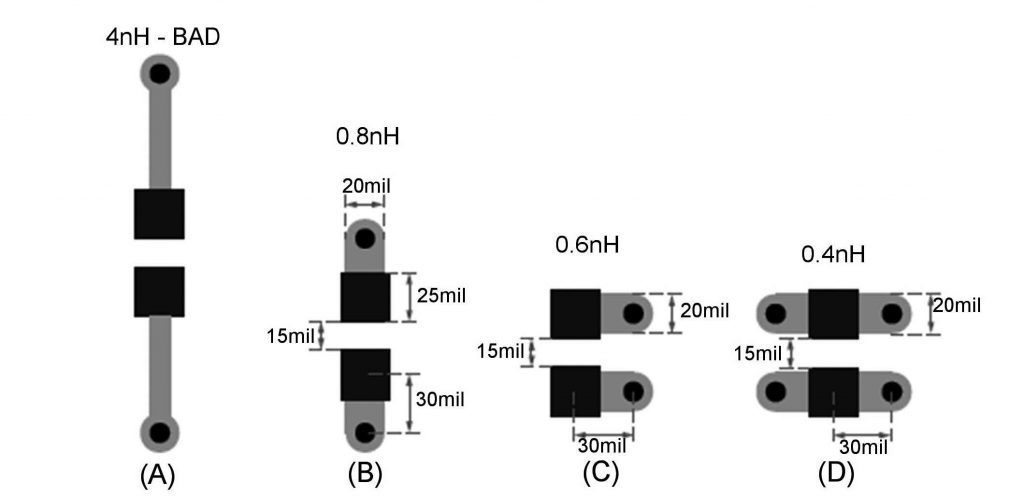
Figura 10: layout Condensatore e sua induttanza parassita (da Xilinx XAPP623).
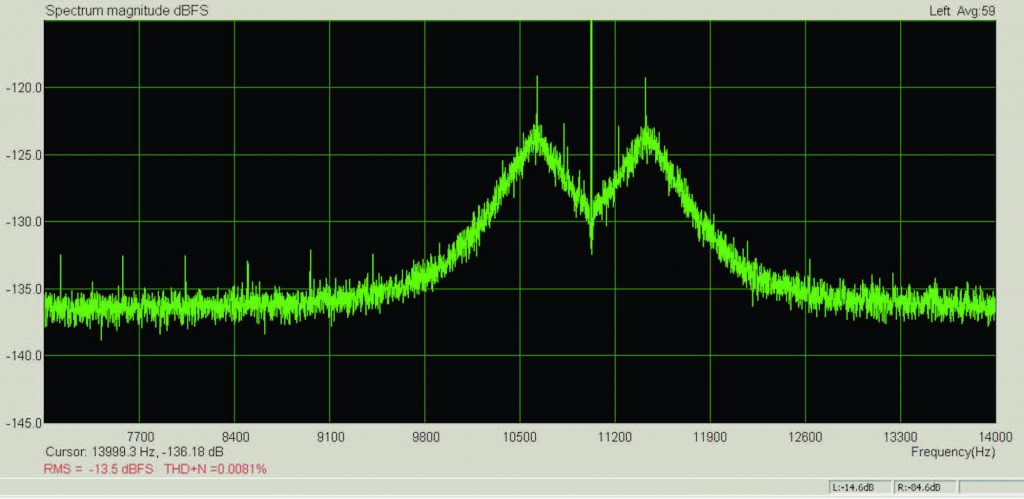
Figura 11: l’effetto del jitter nello spettro di un segnale audio
CONCLUSIONE
Abbiamo visto per quali ragioni dobbiamo riservare una cura ancora maggiore che in passato alla progettazione del sistema di alimentazione a livello board. Abbiamo passato in rassegna i componenti che abbiamo a disposizione per realizzare la PDN. Nella seconda ed ultima parte di questa serie discuteremo il processo di progettazione e verifica della PDN.

Buon giorno a tutti e complimenti per l’articolo interessante.
In genere io utilizzo sempre anche un filtro formato da 2 capacita’ e un induttore.
Mi sono orientato come penso molti , sui moduli cc/cc impaccati che hanno efficienze oltre 85%.
Volevo segnalare anche l’importanza della separazione delle masse su PCB , come avevate, mi pare, trattato in un articolo.
Mi e’ capitato infatti di notare dei blocchi della CPU o funzionamenti insoliti , specie su prototipi di PCB fatti a filature , che poi sparivano una volta spostato un filo di massa della CPU o realizzato lo stampato vero e proprio .
Volevo chiedere cosa ne pensate dell’utilizzo dei moduli cc/cc isolati e come sia possibile effettuare una vera separazione galvanica di I/O ( per i digitali ci sono i fotoaccoppiatori ) se si utilizza anche l’A/D converter della CPU e che richiede la massa comune a quella di potenza come riferimento per i parametri da misurare e dal momento che le masse della CPU ADGND e GND sono in comune all’interno del micro :
EX: Tensione di alimentazione per salvabatteria con possibilita’ di variare il riferimento da SW.
Grazie e buona giornata
Trovi un bel po’ di materiale qui https://it.emcelettronica.com/?s=pcb ma anche qui https://it.emcelettronica.com/commutazione-e-protezione-dei-circuiti-elettronici-in-sistemi-alimentati-a-batteria