
Un progetto semplice per migliorare la sicurezza sulla bicicletta. Progettato per chi va regolarmente in bici, il circuito a microcontrollore permette di evitare di girarsi continuamente per controllare il traffico e i veicoli intorno al ciclista.
Introduzione
La maggior parte dei ciclisti dispongono di un piccolo specchietto retrovisore a destra o a sinistra per controllare i veicoli che stanno dietro. Al giorno d'oggi, tale accessorio è difficile da trovare. Ecco perché è stato pensato un sistema che potesse avvisare senza dover girare la testa continuamente. In tal modo viene assicurata una maggiore concentrazione sulla strada e sulla guida. In molte città, le macchine e gli autobus vanno in ogni direzione, spesso senza alcun preavviso, quindi bisogna stare molto attenti (vedi figura 1).

Figura 1: in molte città, le macchine e gli autobus vanno in ogni direzione, spesso senza alcun preavviso
Alcune strade sono molto strette e gli autobus, i taxi e i minibus sfiorano sempre i ciclisti mentre li sorpassano. Il sistema qui proposto è una sorta di radar, composto da due sensori ultrasonici posizionati a 90°. Misurano la distanza tra il sedile della bicicletta (dove il dispositivo è installato) e i veicoli che si avvicinano da dietro. È possibile aggiungere un terzo sensore. Il prototipo presentato qui, visibile in figura 2, ne ha due, ma il software scaricabile [1] può gestire tre sensori. La posizione finale del modulo dipende dalla regolamentazione di guida (a sinistra o destra) quindi il circuito è utilizzabile in qualunque Paese. Il modulo dovrebbe essere installato più a sinistra (nel caso di guida a destra) o più a destra (se la guida è a sinistra).

Figura 2: il prototipo con un sensore a destra e uno sul retro. Si possono vedere i fili che collegano i vibratori su entrambi i lati del telaio del sedile
Come può essere avvisato il ciclista, senza che egli distolga lo sguardo sulla strada? Si è scelto di utilizzare due piccoli motori, posti sotto il sedile, a sinistra e a destra per indicare la direzione da cui proviene il veicolo che si avvicina. Il numero di vibrazioni (1, 2 o 3) dà un'idea della distanza. Si può anche immaginare d'installare i vibratori sul manubrio, a sinistra e a destra, facendo passare dei fili. I vibratori sono piccoli motori estremamente leggeri, recuperati da vecchi telefoni cellulari. Per quanto riguarda l'alimentazione elettrica, il consumo del circuito deve essere il più basso possibile, quindi il dispositivo è limitato alla sola funzione di radar. È alimentato da una batteria al litio, ricaricata da un circuito integrato dedicato (il MAX1555). Non si è utilizzato alcun regolatore. Si potrebbe adottare un pannello solare.
Il circuito
Dal momento che serve misurare il voltaggio della batteria, si è utilizzato un piccolo microcontrollore a 8 pin con riferimento di tensione integrato, per ridurre al minimo il consumo di energia. Il 12F1512 supporta un intervallo di tensione di alimentazione tra 3 V e 5 V. Per i sensori a ultrasuoni esistono tante soluzioni. Alcuni di essi possono essere alimentati con una tensione compresa tra 3.3 V e 5 V come, ad esempio, i modelli Y401 e US100. I sensori sono programmati per misurare la distanza in base alla larghezza dell'impulso di ritorno. Un'altra opzione (non utilizzata qui) è quella di ottenere la distanza su un collegamento di tipo seriale. Lo schema elettrico, mostrato in figura 3, è molto semplice: le due uscite GP1 e GP2 del μC attivano i trigger dei due sensori ultrasonici e una porta OR a diodo consente di misurare il tempo fino all'impulso di ritorno. Poiché l'attivazione e la misurazione della distanza sono sequenziali, è sufficiente una sola porta OR. La misurazione viene effettuata con l'aiuto del Timer1, che conta secondo lo stato logico del pin 4 (GP3, T1GVAL). Il registro di tale timer è incrementato quando il pin è su "1"; non fa nulla, invece, quando il pin è a "0". Il software effettua un ritardo preliminare (mentre il segnale è a "0") quindi misura il tempo durante il quale il segnale è a "1" e interrompe la misurazione se il limite di tempo (TIME_LIMIT_WAIT) viene raggiunto. Questo si verifica nel caso in cui nessun ostacolo viene trovato dai sensori a ultrasuoni. La porta OR a diodo è collegata a tale ingresso. Il tempo viene letto quando il segnale della porta OR ritorna a "0". La distanza viene calcolata mediante la seguente formula:
d = t × 34/200 [cm]
dove "t" è la durata del segnale "alto", in microsecondi. I vibratori sono attivati da due FET BS170. Come affermato in precedenza. il modulo può essere alimentato da qualsiasi batteria al litio. Un circuito integrato MAX1555 controlla la carica da una porta USB.

Figura 3: il semplice schema elettrico del radar per bicicletta
Il software
Il software è molto semplice. Ogni due secondi:
- si attiva il sensore destro;
- misura la distanza;
- attiva il vibratore destro, se un ostacolo è rilevato;
- esegue le stesse operazioni con il sensore sinistro.
Se un terzo sensore è collegato al centro (uscita GP5), il software genera l'avviso attivando entrambi i vibratori, contemporaneamente. Le distanze per gli avvisi sono predefinite nel software. Esso è stato sviluppato con l'ultima versione di MikroC, l'unico che riconosce il microcontrollore 12F1512. La versione gratuita è sufficiente perché la dimensione del programma finale è molto ridotta.
Montaggio sulla bici
Il prototipo può essere allestito su basetta millefori, come è possibile osservare in figura 4. Probabilmente il montaggio è il compito meno semplice. Il radar è posto sotto il sellino. Può essere fissato mediante delle fascette. Occorre posizionarlo esattamente in orizzontale per evitare rilevamenti incongruenti. Il radar deve essere orientato in modo adeguato, secondo la direzione del traffico del Paese di utilizzo. I motori vibratori dovrebbero essere installati sotto il sellino, rivestiti con guaina termica e fissati con una fascetta sulle due aste metalliche del telaio. Allungando le connessioni elettriche è possibile montarli sul manubrio. Il dispositivo di sicurezza potrebbe essere ulteriormente sviluppato prevedendo, ad esempio, ulteriori sensori, metodi alternativi di alimentazione, ecc.
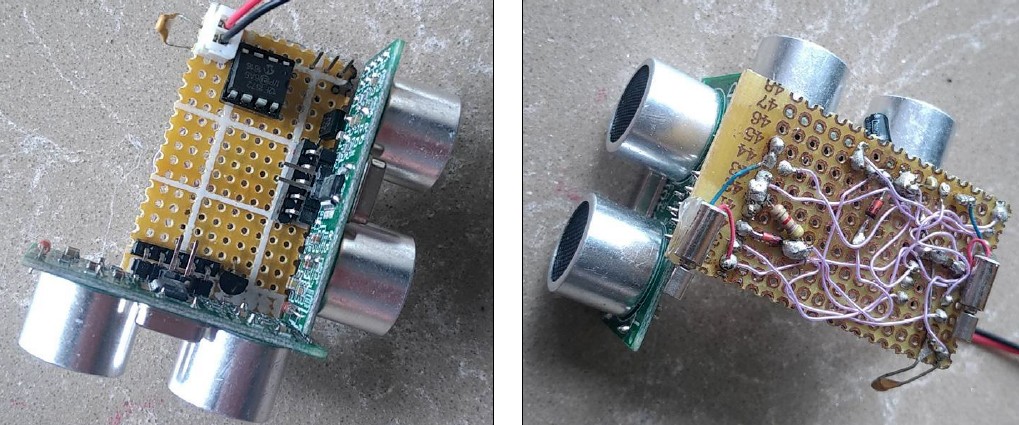
Figura 4: il montaggio del circuito sulle due facce di una basetta millefori
Web link
[1] Pagina ufficiale dell'articolo: www.elektormagazine.com/170501-03


Questo progetto é davvero interessante e non vedo l’ora di replicarlo!!! Probabilmente utilizzeró un ATtiny85 e l’idea del pannello solare non é male