Sul blog di Elettronica Open Source puoi leggere non solo tutti gli articoli Premium riservati agli abbonati Platinum 2.0 e inseriti nella rivista Firmware 2.0 (insieme ad articoli tecnici, progetti, approfondimenti sulle tecnologie emergenti, news, tutorial a puntate, e molto altro) ma anche gli articoli tecnici della Rubrica Firmware Reload. In questa Rubrica del blog abbiamo raccolto gli articoli tecnici della vecchia rivista cartacea Firmware, che contengono argomenti e temi evergreen per Professionisti, Makers, Hobbisti e Appassionati di elettronica. Analogico è bello, senza dubbio, ma digitale a volte è meglio, per più di un motivo; da quello dei rendimenti indubbiamente più elevati a quello del contenimento dei costi di realizzazione, oggi drammaticamente attuale. Nell’articolo che segue saranno affrontate in modo esaustivo tutte le sfaccettature dell’alimentazione microcontrollata.
Esistono tanti modi per effettuare una conversione DC-DC: alcuni sono più efficaci di altri ma tutti devono essere scelti sulla base della specifica applicazione nella quale prevediamo l’impiego. Nelle telecomunicazioni, per esempio, una possibilità che permetta di effettuare la conversione da un livello di tensione molto alto, tipicamente quello di distribuzione della rete, ad uno intermedio, vicino ai 48 V, è il PSFB che, come al solito, è un acronimo che sta per Phase Shifted Full Bridge, ovvero configurazione a ponte completa con scostamento di fase. Uno stadio di questo tipo fornisce una traslazione di tensione ma anche un isolamento dalla linea di tensione stessa, dal momento che questa configurazione include un trasformatore. Con queste premesse, si capisce chiaramente che questa si propone come una delle soluzioni più interessanti in questo campo. Quello che vedremo più avanti in questo articolo riguarda le possibili implementazioni ed i dettagli di realizzazione di un sistema PSFB controllato con tecnica digitale tramite un sistema ad alta tensione basato su un kit della Texas Instruments. Scopo di questo esperimento sarà convertire una tensione continua in ingresso pari a 400V in un’uscita in tensione sempre DC regolata a 12. Entrambe le implementazioni, sia la modalità di controllo peak current (PCMC) sia la modalità di controllo in tensione (VCM), verranno descritte ed analizzate. Entrambe queste soluzioni, che sono basate su microcontrollori, prevedono la ZVS, che sta per Zero Voltage Switching, ovvero una funzionalità che vedremo meglio di seguito. Esistono anche, nella documentazione, schemi di rettificazione sincrona. Vedremo anche come sia possibile generare forme d’onda piuttosto complesse che sono richieste per il controllo di questi schemi ed anche una temporizzazione molto rigida, che ottimizzerà le prestazioni del sistema anche durante eventuali variazioni di condizioni di funzionamento dell’intero sistema.
PERCHÉ È INTERESSANTE?
Come abbiamo accennato in apertura, un sistema di questo tipo trova frequente impiego in soluzioni tipo alimentatori per server, rettificatori in ambito telecomunicazioni, sistemi di ricarica per le batterie, ma soprattutto nelle energie rinnovabili. Tradizionalmente, i microcontrollori sono stati impiegati, in numero molto maggiore, all’interno di sistemi che dovevano effettuare operazioni di supervisione oppure di comunicazione. Dal momento che, d’altro canto, i microcontrollori stessi hanno subito un’enorme evoluzione che ha permesso loro di raggiungere prestazioni di altissimo livello, ora è finalmente possibile utilizzarli all’interno di sistemi ad anello chiuso, contestualmente all’utilizzo delle funzioni più tradizionali. La transizione verso il controllo di potenza digitale implica che tutte le funzioni che prima erano implementate in hardware adesso possano essere implementate tramite software o firmware; questo non migliora soltanto la flessibilità del sistema, ma lo semplifica anche. Adesso è possibile realizzare sistemi intelligenti che gestiscano stadi di potenza e che li controllino. Un convertitore Phase Shifted Full Bridge è costituito da quattro switch (che possono essere MOSFET o anche transistor di potenza come gli IGBT), che formano una struttura a ponte sul circuito primario del trasformatore di isolamento; il secondario, invece, prevede diodi rettificatori oppure MOS switches per la rettificazione sincrona (meglio nota come Synchronous Rectification o SR). Questo tipo di configurazione permette a tutti i dispositivi switching di effettuare la comunicazione con ZVS, il che vuol dire che ci sono perdite da commutazione molto più basse e quindi ne risulta una conversione molto più efficiente. Lo ZVS è una parte importante di questa configurazione e permette di raggiungere risultati notevoli tra cui l’intervallo di carico completo, modificando i tempi “morti” per il circuito primario oppure le condizioni di carico.
Per questo genere di topologia isolata, la rettificazione dei segnali è assolutamente richiesta nel secondario; per sistemi che abbiano uscite in potenza ed in tensioni molto basse oppure alti valori di corrente in uscita, il fatto che venga implementata la rettificazione sincrona piuttosto che l’utilizzo di un semplice diodo rettificatore permette di migliorare sensibilmente le prestazioni, perché non ci sono contributi di perdita tipicamente associati ai diodi. Un convertitore DC-DC può essere controllato in vari modi come il VMC, l’ACMC ed il PCMC. Questi tre metodi di controllo differenti per lo stadio di potenza richiedono tipicamente che ci sia il progetto ad-hoc del circuito di controllo, insieme ad alcuni cambiamenti nel sistema di rilevazione della potenza. Il fatto che vengano utilizzati i microcontrollori e quindi sistemi basati su di essi, permette una facilità di progettazione e di revisione dell’intero progetto che prima non c’era, dal momento che adesso si può fare tutto direttamente via software. In seguito vedremo i vantaggi di alcune di queste tecniche, ma anticipiamo che il PCMC rappresenta uno schema di controllo di grande interesse per tutti i convertitori di potenza, per via del fatto che ci sono un “feed forward” di tensione, un sistema di limitazione della corrente automatico ed altri vantaggi interessantissimi. Implementare il PCMC in un sistema PSFB richiede la modulazione PWM (Pulse Width Modulation) ed è proprio per questo genere di funzione che è necessario quel preciso e rigorosissimo controllo delle funzioni di scansione temporale di cui parlavamo in precedenza. Un nuovo approccio alla generazione di questa forma d’onda è stato possibile grazie all’intervento di Texas Instruments, di cui stavamo parlando in precedenza, tramite la serie Piccolo con i microcontrollori TMS320F2802x e TMS320F2803x che non richiedono, per essere impiegati, alcun tipo di circuiteria ulteriore. La “slope compensation” hardware su chip è una caratteristica molto interessante, che viene utilizzata per garantire la stabilità in anello chiuso; per l’implementazione PCMC con il microcontrollore, l’uscita in tensione regolata è strettamente dipendente dal ripple presente sulla stessa che, a sua volta, dipende dal carico. L’efficienza di picco più alta del 95% e l’efficienza complessiva superiore al 90% vengono raggiunte con il sistema PSFB 600W: un risultato davvero notevole.
IN DETTAGLIO
Prima di iniziare a parlare di questo argomento più nel dettaglio, andando a vedere singolarmente questi punti, sviluppati sia dal punto di vista dell’hardware sia dal punto di vista della programmazione, è necessario fare una premessa che riguarda la sicurezza: tutti i sistemi di cui stiamo parlando, in particolare questa scheda, lavorano con alti valori di tensione. L’esperienza suggerita e descritta deve essere fatta in strutture professionali ed in ambienti sicuri. Per poter valutare la scheda in maniera consona al rischio connesso, è necessario che ci sia un ottimo isolamento dagli alti valori di tensione DC. Prima che la scheda sia alimentata, o che questo genere di sistemi siano alimentati, devono essere utilizzati un Voltmetro ed un carico resistivo o elettronico direttamente all’uscita del sistema. Non è assolutamente consigliabile maneggiare l’unità quando è alimentata. Agite responsabilmente. Fatto questo doveroso appello per la sicurezza e l’incolumità di tutti voi, possiamo continuare e lo facciamo parlando delle operazioni di base che il sistema deve compiere. Nella Figura 1 è illustrata la configurazione a ponte appena descritta. Come vi avevamo accennato, sono stati utilizzati quattro distinti MOSFET sul primario del trasformatore.
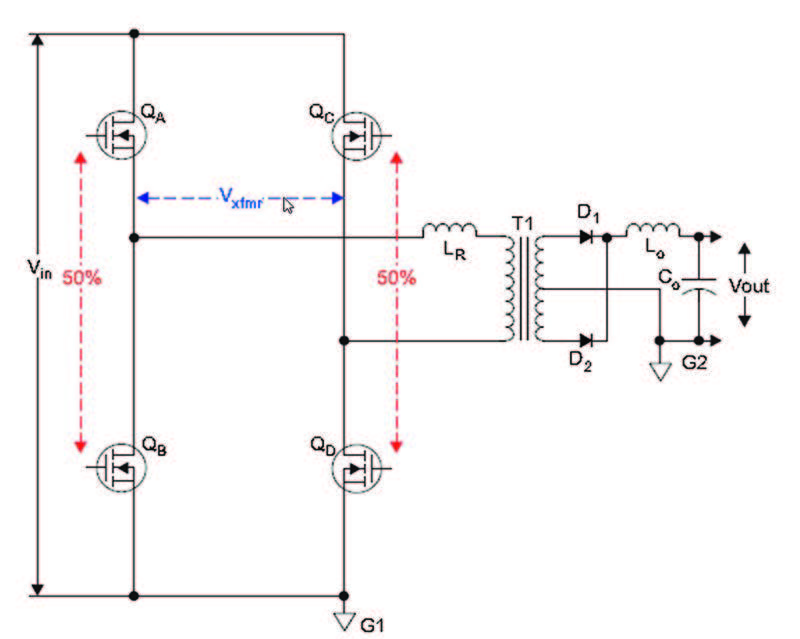
Figura 1: Esempio di configurazione a ponte
I primi due sono commutati al 50% ed hanno uno sfasamento di 180° tra loro. Allo stesso modo, anche i secondi due hanno le stesse caratteristiche. I segnali a commutazione PWM per il ramo Qc-Qd sono ruotati di fase rispetto all’altro. L’entità dello scostamento di fase comporta sostanzialmente l’eventuale sovrapposizione tra le commutazioni diagonali, il che decide, sostanzialmente, la quantità di energia che viene trasferita. I diodi che sono stati implementati eseguono la rettificazione sul circuito secondario, mentre all’uscita è preposto un filtro LC. Se nella prima figura, quindi, abbiamo mostrato la configurazione circuitale, nella Figura 2 sono rappresentate le rispettive forme d’onda.
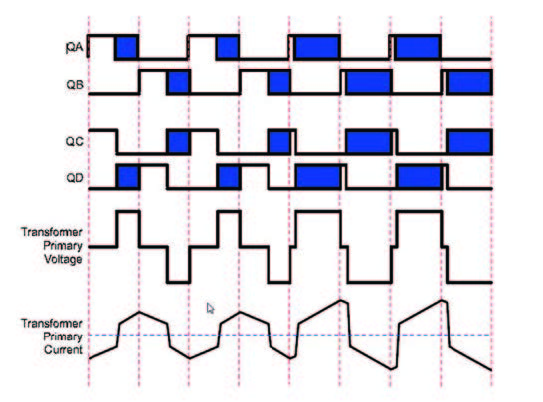
Figura 2: Forme d’onda della commutazione PWM
Vediamo adesso l’implementazione dell’HVPSFB sulla scheda. Nella prossima Figura 3 mostriamo il diagramma a blocchi, abbastanza semplificato, proprio di questa configurazione.
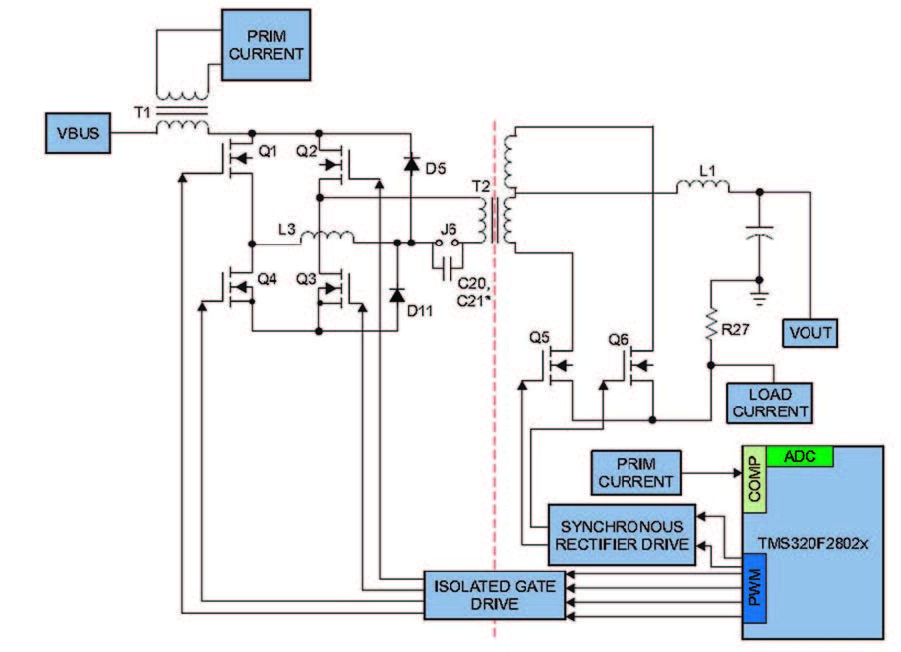
Figura 3: Configurazione HVPSFB
Come si vede, i MOSFET sono configurati esattamente come in precedenza e corrispondono ai transistor che qui vediamo impiegati. Q5 e Q6 sono al lavoro, invece, nel circuito secondario, per effettuare la rettificazione sincrona. L’algoritmo di controllo viene implementato sul microcontrollore C2000, che interagisce direttamente con lo stadio di potenza tramite segnali di feedback ed uscite PWM. Ed è proprio lo scostamento di fase tra i due segnali nei due diversi rami della configurazione a ponte che determina la quantità di energia che viene effettivamente trasmessa al carico; questo vuol dire che questa differenza di fase rappresenta il parametro di controllo per il funzionamento dell’intera configurazione. Il fatto di riuscire ad avere la possibilità di operare in così diverse condizioni richiede la generazione precisa delle forme d’onda PWM ed un hardware sufficientemente sofisticato per effettuare tutti i calcoli connessi con il controllo ad anello. Questo viene effettivamente reso possibile dai microcontrollori C2000, che consentono allo sviluppatore un controllo sui moduli PWM configurati come delle periferiche grazie alla funzionalità piuttosto avanzata, oltre al fatto che esistono comparatori analogici con DAC e hardware per la “slope compensation”. Su CPU a 32 bit è anche possibile lavorare con segnali ad alta velocità che siano accoppiati con convertitori ADC e l’algoritmo che sta dietro a questa conversione potremo mostrarlo tra poco. Quello che preme in questo momento è mostrarvi i punti salienti di questo kit tramite il seguente elenco:
- input 400 V DC input, 12 V DC output
- efficienza di picco più alta del 95%, efficienza superiore al 90%
- output rated 50 A (600 Watt)
- topologia circuitale Phase Shifted Full Bridge(PSFB)
- frequenza di switching 100 kHz
- PCMC senza alcun circuito esterno di supporto per funzioni specifiche
- schemi switching multipli per Synchronous Rectification (SR)
- Adaptive Zero Voltage Switching (ZVS) e LVS su tutto il range di carico
- ottima Graphic User Interface (GUI) che permette un controllo ottimale sulle prestazioni
- Fault protection: input UV e OV, overcurrent, output UV (modalità CC e CP)
- funzioni a corrente costante (CC) e a potenza costante (CP)
- modalità di controllo di tensione (VMC) opzionale
Le prestazioni di questo kit per HVPSFB sono sintetizzate nella Figura 4.
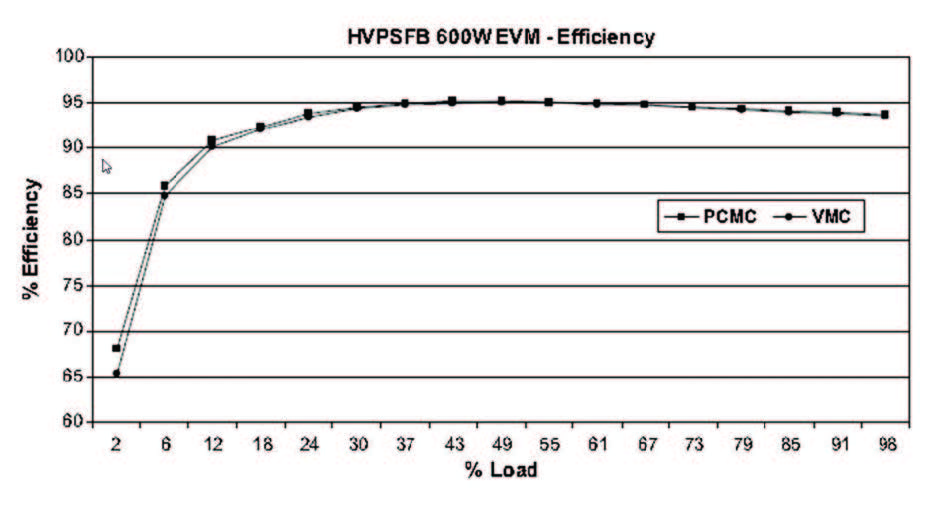
Figura 4: Le prestazioni del kit per HVPSFB
Nella Figura 5, invece, vi mostriamo proprio la GUI che abbiamo riportato nell’elenco perché qui si vede molto chiaramente quale sia la facilità di controllo ed il grado di libertà che il progettista ed il programmatore possono avere su questo genere di sistemi. Lo schema elettrico del kit viene proposto in Figura 6, evidenziandone i blocchi fondamentali; stiamo parlando del TSM320F28027, sempre della serie Piccolo.
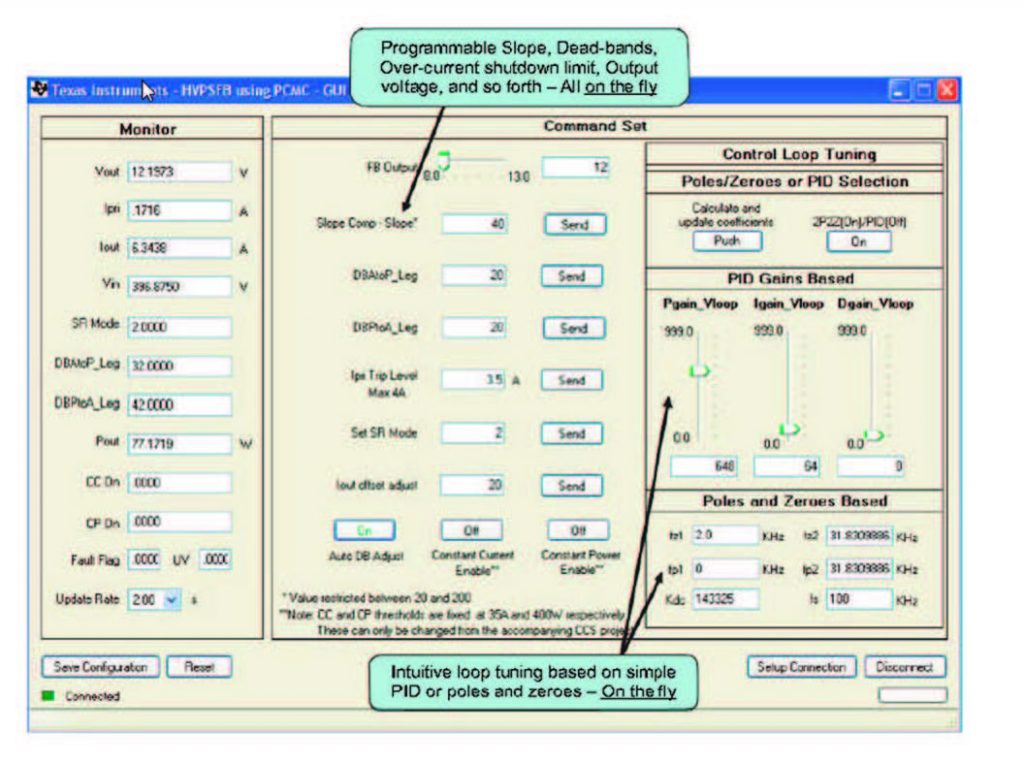
Figura 5: Aspetto della GUI
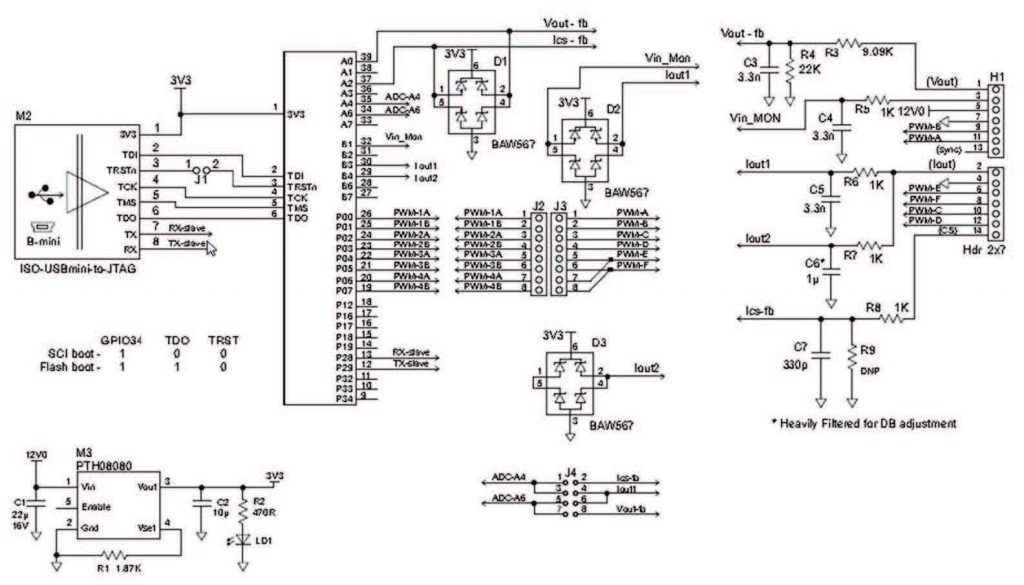
Figura 6: Schema elettrico del kit



