Esaminiamo la scheda Makerfactory Hexapod che permette, ai Maker, di progettare e di costruire un robot funzionante secondo le proprie esigenze e direttive impostate. E' basata su un'unità di controllo di diversa natura come, ad esempio, Arduino, Raspberry Pi o NodeMCU. Flessibilità massima per allestire e programmare il proprio robot a 360°. La scheda sarà disponibile presso lo stand della Conrad durante la Maker Faire.
Il robot Hexapod
I dispositivi Hexapod sono robot a sei zampe, spesso molto simili a insetti, come mostrato in figura 1. Sono dotati, dunque, di sei gradi di libertà. Le loro stabilità e versatilità sono estreme. I robot Hexapod sono disponibili sul mercato in una varietà di look e di design diversi e con differenti opzioni. Vengono prodotti da diverse aziende. Per lo più dai fini didattici, questa tipologia di robot introduce gli sperimentatori nel campo della robotica con grande facilità. Esistono online forum e comunità nelle quali vengono condivise idee, progetti e notizie tecniche.
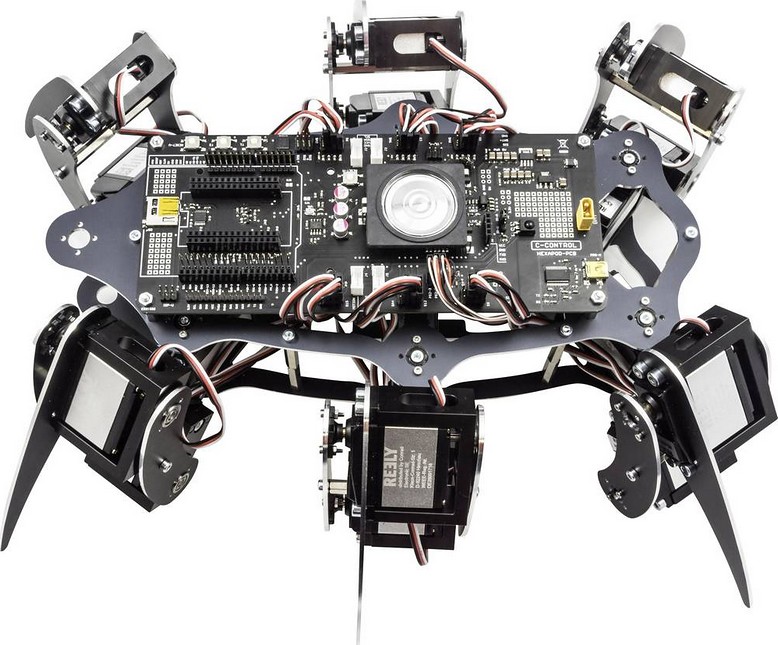
Figura 1: un robot hexapod
La Makerfactory hexapod scheda robot
Andiamo, adesso, a esaminare le caratteristiche sostanziali della scheda di controllo, osservabile in figura 2, iniziando a elencarle qui du seguito:
- piena compatibilità con Arduino e Raspberry Pi;
- si può utilizzare anche come scheda robotizzata generica;
- è espandibile in diverse modalità;
- possibilità di comunicazione seriale tra scheda e meccanica;
- per gli utenti e i programmatori di Arduino è disponibile una potente libreria;
- presenza onboard del controller delle gambe;
- le connessioni sono estremamente accessibili;
- la scheda può essere programmata tramite l'Arduino IDE;
- compatibilità del controller di posizione con la scheda Arduino MEGA2560;
- regolazione automatica dei livelli di tensione (3.3V o 5V);
- è predisposta per la riproduzione di musica, suoni, audio in generale o emissione vocale;
- il controllo può essere effettuato tramite gamepad PS2.

Figura 2: la Makerfactory hexapod scheda robot
La scheda robot Hexapod è progettata per consentire modifiche personalizzate. Sulla board vi sono anche alcuni componenti aggiuntivi estremamente utili nelle applicazioni di robotica. Tra esse si possono annoverare pulsanti, slot per schede MicroSD, altoparlante amplificato, connettori I2C, ricevitore IR, interfaccia di programmazione USB per il controller di posizione, connettori ISP (SPI) e altri ingressi e uscite.
Gli accessori necessari
Per la programmazione e l'utilizzo completo di un robot funzionante, secondo le proprie esigenze, occorrono le seguenti componenti, visualizzate anche in figura 3:
- la Makerfactory hexapod scheda robot;
- un robot hexapod;
- alcuni servo;
- un gamepad compatibile PS2 Controller Interface;
- un pacco batterie NiMH a 5 celle, con tensione di 6 VDC e con capacità minima di 2000 mAh;
- una scheda Arduino UNO , NodeMCU o Raspberry Pi.

Figura 3: gli accessori necessari per l'allestimento di un robot completo
Alcune connessioni sulla scheda
La Makerfactory hexapod scheda robot è dotata di tantissime connessioni verso il mondo esterno. Esaminiamo le più importanti osservando, contestualmente, i riferimenti mostrati in figura 4:
- (1) connettore BAT: si tratta di un connettore XT30 per il collegamento delle batterie. Come detto prima occorre assicurare una capacità di almeno 2000 mAh;
- (2) PRG-M: connettore USB per la programmazione del controllore di locomozione;
- (3) TX-LED e RX-LED: segnala la trasmissione di un programma verso Locomotion Controller;
- (4) 3.3V, 5V e GND: pin con tensione disponibile per gli usi più disparati, rispettivamente di 400 mA e 1000 mA stabilizzati;
- (5) J7: questo jumper attiva o disattiva l'utilizzo del gamepad;
- (6) connettore ISP: serve per programmare la scheda tramite un dispositivo ISP;
- (7) PS2-1, PS2-2, PS2-3: a questi pin può essere collegato un gamepad compatibile PS2, per un controllo manuale;
- (8) RESET-M: pulsante che invia un reset hardware quando premuto;
- (9) da S0 fino a S17: porte per il collegamenti dei servo delle gambe. La piedinatura è standard e prevede il collegamento con la maggior parte dei servo esistenti sul mercato;
- (9) da SA0 fino a SA5: ingressi analogici;
- (10) Speaker: altoparlante che emette un segnale acustico ed è collegato all'amplificatore audio. I segnali acustici possono essere generati dal controllore di locomozione e dalla scheda utente;
- (11) Vol: trimmer per la regolazione del volume dei segnali acustici. Per regolare il piccolo trimmer si utilizza un piccolo cacciavite da orologiaio;
- (12) RESET-U: pulsante per l'azzeramento dellla scheda;
- (13) uSD: slot per scheda MicroSD.
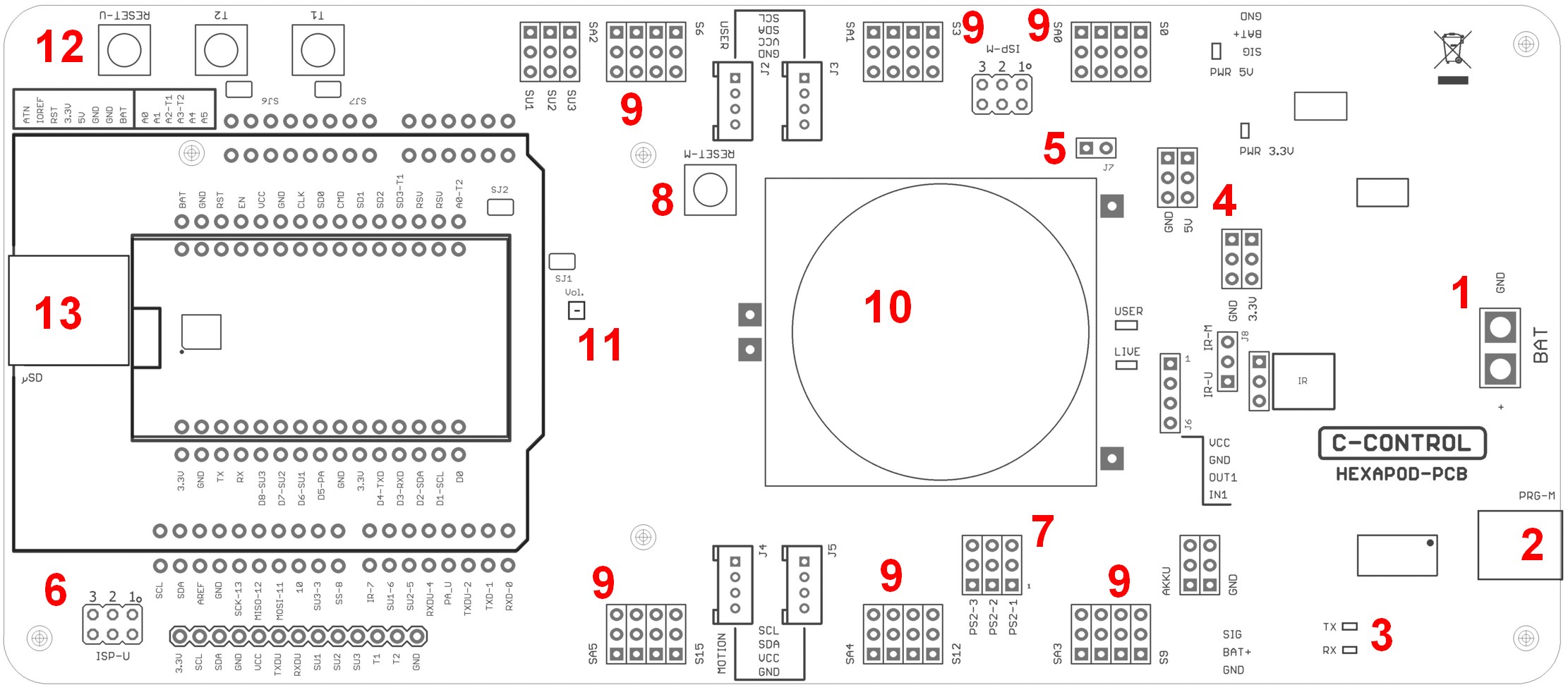
Figura 4: le connessioni sulla scheda robot Makerfactory hexapod
La corretta alimentazione elettrica è importante
Dal momento che si presuppone che la scheda robot Hexapod venga collegata a dei motori, è essenziale applicare la giusta alimentazione elettrica all'intero sistema. La scheda funziona con una tensione di alimentazione compresa tra 4,5 e 10 V/DC. SI controlli, dunque, il voltaggio richiesto dalle periferiche a essa collegate. E' caldamente raccomandato l'utilizzo di batterie NiMH a 5 celle con almeno 2000 mAh quando si utilizzano servo RC. Se la capacità della batteria è troppo bassa si potrebbero verificare continui reset del robot nonché una breve autonomia di funzionamento. La lunghezza del cavo di alimentazione non dovrebbe superare i 20 cm.
Il Software e le librerie
Tutto il materiale software è disponibile in Rete sul sito della Conrad. Si acceda alla pagina del prodotto cercando, sull'apposita barra di ricerca, la stringa "scheda robot Makerfactory Hexapod". Si scarichi, dunque, il pacchetto "C-Control_Hexapod_Vx_x.zip" (vedi figura 5) contenente, tra gli altri:
- le schede tecniche del prodotto;
- i drivers;
- le librerie per Arduino, gli esempi e il firmware;
- lo schema elettrico della scheda in formato PDF;
- il software di calibrazione;
- il manuale utente.
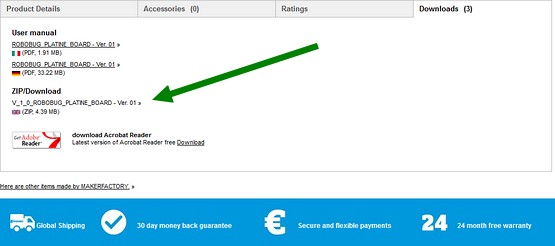
Figura 5: il download delle librerie
Le librerie e i drivers vengono costantemente aggiornati allo scopo di fornire un completo e affidabile supporto per tutti gli utenti.
Calibrazione
Grazie al software "Terminale" presente nel pacchetto d'installazione (vedi figura 6), è possibile calibrare con precisione le caratteristiche delle gambe del robot. Per effettuare correttamente le regolazioni è necessario posizionare il robot in modo che le gambe siano libere di muoversi, quindi si deve collegare la scheda al PC attraverso il connettore PRG-M. Selezionare, dunque, la corretta porta seriale e la velocità di trasmissione.
A questo punto si deve cliccare sul pulsante "Servo offset mode" per iniziare la calibrazione vera e propria. I servo oscillano e fluttuano e aspettano le pressioni dei tasti "+" e "-" per poter effettuare le regolazioni a piccoli passi. Tale procedura va ripetuta per tutti i servo collegati alla scheda.
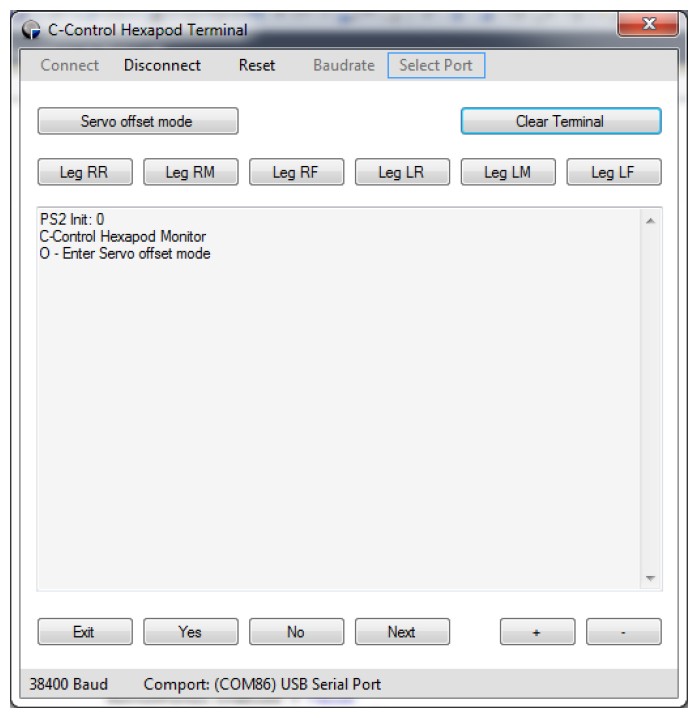
Figura 6: il software per la calibrazione del sistema
Alcuni comandi e funzioni
Per concludere ecco una parziale lista di funzioni di libreria. Esse sono contenute nel file d'inclusione "Hexapod_Lib.h" e hanno lo scopo di gestire, in maniera estremamente semplice, qualsiasi robot:
- void ROBOT_INIT(void);
- void ROBOT_RESET(void);
- void ROBOT_MOVE(byte _lateral, byte _turn, byte _move);
- void ROBOT_WALK_FWD(void);
- void ROBOT_WALK_BWD(void);
- void ROBOT_WALK_LEFT(void);
- void ROBOT_WALK_RIGHT(void);
- void ROBOT_STOP(void);
- void ROBOT_TURN_LEFT(void);
- void ROBOT_TURN_RIGHT(void);
- void ROBOT_PWR_ON(void);
- void ROBOT_PWR_OFF(void);
- void ROBOT_HEIGHT(byte _hight);
- void ROBOT_GAINT_MODE(byte gaint_mode);
- void ROBOT_ROTATE_MODE(byte _x, byte _y, byte _z, byte _BodyYShift);
- void ROBOT_TRANSLATE_MODE(byte _x, byte _y, byte _z, byte _BodyYShift);
- void ROBOT_BALANCE_MODE_ON(void);
- void ROBOT_BALANCE_MODE_OFF(void);
- void ROBOT_DOUBLE_HEIGHT_ON(void);
- void ROBOT_DOUBLE_HEIGHT_OFF(void);
- void ROBOT_DOUBLE_LENGTH_ON(void);
- void ROBOT_DOUBLE_LENGTH_OFF(void);
- void ROBOT_PLAY_TONE(byte _duration, byte _frequency);
- void ROBOT_SPEED(byte _speed);
- void MSound(byte cNotes, ...);
- void SoundNoTimer(unsigned long duration, unsigned int frequency);
- void SendData(byte _cmd, byte _data1, byte _data2, byte _data3, byte _data4);
- bool ReceiveAck(void);
- void ErrorHandle(void);
- bool CheckForSerialData(void);
- bool CheckRxCrc(void);
- float ReadVoltage(void);
- bool ReadPs2Status(void);
- bool ReadIsWalking(void);
- bool ReadIsPowerOn(void).
La scheda Makerfactory Hexapod è disponibile a catalogo Conrad con spedizioni 24H
![]()




Una scheda dalle tante applicazioni, forte anche della compatibilità Arduino e Raspberry.
un vero spettacolo
Sarebbe ideale anche per la didattica rivolta ai più giovani. Sicuramente non si annoierebbero e affronterebbero l’elettronica e la programmazione con tanta passione.