In questo articolo viene trattata un’introduzione ai sensori di campo magnetico attraverso il semplice progetto di una bussola digitale.
INTRODUZIONE
Un sensore di campo magnetico (o più semplicemente un magnetometro) è uno strumento di misura dell’intensità e della direzione, appunto, del campo magnetico locale. Trova applicazione in diversi ambiti, dall’archeologia per la ricerca di siti sotterranei alla meteorologia per lo studio delle aurore, dall’esplorazione dei siti carboniferi ai sistemi di perforatura direzionale, dal rilevamento di sottomarini e ordigni in ambito militare alle applicazioni di esplorazione planetaria, dalla navigazione (rappresentativo è in questo caso l’esempio delle bussole per l’orientamento) alla medicina.
PRINCIPIO DI FUNZIONAMENTO
I sensori di campo magnetico possono essere classificati in base al loro principio di funzionamento. I dispositivi di tipo galvanico, ad esempio, si basano sull’effetto Hall, in altre parole (si veda la Figura 1) l’insorgere di una tensione sulle facce di una lamina di materiale conduttore o semi-conduttore quando questa è attraversata da una corrente longitudinale e in presenza di un campo magnetico perpendicolare.
![Figura 1: principio di funzionamento di un sensore a effetto Hall (da [1]).](https://it.emcelettronica.com/wp-content/uploads/2019/10/principio-di-funzionamento-di-un-sensore-a-effetto.jpg)
Figura 1: principio di funzionamento di un sensore a effetto Hall
dove n è il numero di portatori di carica, e la carica dell’elettrone, RH il coefficiente Hall, Bz ed Ix le intensità, rispettivamente, della componente perpendicolare del campo magnetico e di quella trasversale della corrente che attraversa la lamina di materiale. I sensori a effetto Hall sono fabbricabili utilizzando processi standard bipolari o CMOS su substrati drogati di tipo n. I dispositivi bipolari hanno una sensibilità di circa 50 V/AT mentre quelli nMOS fino a 1000 V/AT. Lo svantaggio principale di tali sensori è legato alla scarsa sensibilità, soprattutto per bassi valori dell’intensità di campo, a causa delle tensioni di offset presenti ai capi della lamina. Per questo sono tipicamente utilizzati in applicazioni con campi piuttosto intensi, come ad esempio per i dispositivi ABS delle autovetture. Più elevata sensibilità si ottiene con i dispositivi magnetoresistivi, i quali basano il funzionamento sulla variazione della resistenza del materiale in presenza di un campo magnetico esterno. Tale resistenza varia, infatti, di un fattore:
![]()
dove:
![]()
noto come angolo di Hall, è l’angolo del quale la corrente longitudinale è ruotata come effetto della presenza del campo magnetico; per tale angolo vale la seguente approssimazione:
![]()
dove µ è la mobilità dei portatori di carica. Tipicamente, i semiconduttori non evidenziano elevata mobilità (1600 cm2/Vs), per questo motivo sono più spesso usati, in tali applicazioni, materiali come l’InSb, drogato con NiSb. Gli svantaggi principali sono l’elevata dipendenza della temperatura dalla variazione di resistenza e la difficoltà di lavorare tali materiali con tecniche classiche di produzione di circuiti integrati. Compatibili con tali processi sono invece i magnetodiodi e i magnetotransistori. Nel caso di questi ultimi (ne sono mostrati in Figura 2 due diversi layout), in particolare, la generazione di una tensione nella regione attiva per effetto Hall in presenza di un campo magnetico esterno produce una modulazione della corrente di emettitore e quindi di collettore.
![Figura 2: schemi alternativi di magnetotransistori (da [1]).](https://it.emcelettronica.com/wp-content/uploads/2019/10/schemi-alternativi-di-magnetotransistori-da-1.jpg)
Figura 2: schemi alternativi di magnetotransistori
Nel caso della Figura 2a, ad esempio, la variazione di corrente di collettore, avendo applicato una tensione di polarizzazione ai punti di contatto di base b1 e b2, è data dalla seguente espressione:
![]()
Misurando questa, nota la corrente di emettitore, è possibile misurare il campo magnetico presente. Sensibilità ancora più elevata si ottiene con i sensori SQUID (Superconducting Quantum Interference Device) i quali si basano (Figura 3) su strutture ad anello di materiale superconduttore interrotte da una (RF SQUID) o due (DC SQUID) giunzione Josephson. In quest’ultimo caso, ad esempio, in presenza di una corrente di polarizzazione, si osserva l’insorgere di una differenza di flusso magnetico tra le due spire che è proporzionale al prodotto tra l’intensità stessa di corrente e la differenza dei seni delle fasi del campo in corrispondenza delle due giunzioni. Mediando l’oscillazione di tale tensione, si determina una caratteristica V-I del sensore dalla misura dalla quale è quindi possibile risalire all’intensità di campo incidente. La sensibilità dei sensori SQUID può arrivare fino a 10 - 4 T, confrontabile con l’intensità di campo associata alle onde cerebrali o all’attività cardiaca; sensori SQUID sono per questo, spesso usati in apparecchiature medicali per magnetoencefalogrammi e magnetocardiogrammi. Lo svantaggio principale di tali dispositivi risiede nella necessità di raffreddare a basse temperature il superconduttore.
![Figura 3: schema di un sensore SQUID (b) e tipiche caratteristiche I_V (a) (da [1]).](https://it.emcelettronica.com/wp-content/uploads/2019/10/schema-di-un-sensone-squid.jpg)
Figura 3: schema di un sensore SQUID (b) e tipiche caratteristiche I_V (a)
UNA SEMPLICE APPLICAZIONE: UNA BUSSOLA DIGITALE
Tra le applicazioni più interessanti di un sensore di campo magnetico vi è certamente, come accennato inizialmente, la realizzazione di una bussola digitale. In questo caso, il magnetometro serve a misurare le componenti del campo geo-magnetico per determinare la posizione del polo terrestre. La direzione nord può essere tracciata, infatti, calcolando l’arcotangente del rapporto tra le due componenti orizzontali del campo stesso. In tali applicazioni, la misura del magnetometro viene spesso corretta mediante un accelerometro a tre assi che permetta di determinare l’orientamento nello spazio della bussola stessa, ovvero i parametri di beccheggio (pitch) e rollìo (roll) relativi. Un'interessante Application Note di Freescale mostra come realizzare su queste basi una bussola digitale con capacità di correzione di inclinazione. Di seguito ne sono riportati i punti salienti. Indichiamo con Br e Gr, rispettivamente, le misure delle componenti del campo magnetico e dell’accelerazione di gravità fornite dal magnetometro e dall’accelerometro lungo i relativi assi. In condizioni che potremmo definire di riferimento, con la bussola orientata sul piano orizzontale in direzione nord (useremo il sistema di coordinate standard NED), tali misure valgono rispettivamente:
dove g è l’accelerazione di gravità, B l’intensità del campo magnetico terrestre (che varia da un minimo di 22 µT nel Sud America a un massimo di 67 µT nel sud dell’Australia) e l’angolo di inclinazione del campo stesso misurato dall’orizzontale (che varia da -90° al polo sud magnetico a +90° al polo nord magnetico). Se, invece, la bussola ha un orientamento generico rispetto alla posizione di riferimento, il magnetometro e l’accelerometro forniranno le seguenti letture (lungo i tre assi) per quanto riguarda accelerazione di gravità e campo magnetico terrestre:
Nelle espressioni di sopra:
![]()
rappresentano evidentemente le tre matrici di rotazione che descrivono, appunto, il nuovo orientamento della bussola rispetto al sistema di riferimento inizialmente adottato. Il vettore V è stato invece introdotto per compensare (mediante un semplice modello a tre elementi) le perturbazioni attribuibili alla presenza di materiali magnetizzabili nell’ambiente circostante; questi sono noti come effetti di Hard Iron. In applicazioni più complesse, per avere una migliore accuratezza, andrebbero in realtà compensate anche le analoghe perturbazioni (note come effetti di Soft Iron) attribuibili ai campi magnetici permanenti, causate, ad esempio, da calamite o da correnti continue che scorrono vicino alla bussola. Dalle misure ottenute dall’accelerometro e dal magnetometro è infine possibile risalire agli angoli di rotazione della bussola. Questi sono dati dalle seguenti relazioni:


In particolare l’angolo:
![]()
di yaw (beccheggio) determina il puntamento della bussola rispetto al polo Nord. L’Application Note di Freescale citata in precedenza riporta, come detto, i dettagli matematici per derivare le espressioni degli angoli ricavate in precedenza; inoltre, presenta il codice di riferimento in linguaggio C# per la realizzazione di una simile applicazione.
UN SENSORE DI CAMPO MAGNETICO DI RIDOTTE DIMENSIONI
Freescale distribuisce, inoltre, magnetometri e accelerometri all’interno della propria serie di sensori Xtrinsic per applicazioni come quella discussa. Il MAG3110, ad esempio, è un sensore di campo magnetico in grado di misurare campi lungo i tre assi nell’intervallo fino a 1000 uT, con data rate fino a 80 Hz, risoluzione fino a 0.1 uT e rumore di soli 0.05 uT. Il dispositivo è dotato d’interfaccia di controllo I2C operante a 400 kHz, è disponibile in package DFN a 10 pin di dimensioni 2 mm x 2 mm x 0.85 mm, richiede una singola tensione di alimentazione compresa tra 1.95 e 3.6 V e presenta un assorbimento di corrente, alla massima frequenza di campionamento, di 800 µA; è qualificato per funzionare nell’intervallo di temperature da –40 a +85 °C. Il dispositivo è direttamente calibrato in fabbrica per quanto concerne i coefficienti di sensibilità e temperatura; registri di offset specifici consentono, quindi, di definire nella specifica applicazione i parametri di correzione da applicare per compensare gli effetti di Hard Iron. Il MMA8451Q è invece un accelerometro a tre assi con scala di misura dinamicamente configurabile fino a ±8g, digitalizzazione a 14 e 8 bit, frequenza di campionamento tra 1.56 e 800 Hz. Il sensore dispone di interfaccia I2C di controllo e di tre canali integrati per rilevamento di moto. Esso è alimentato con tensione compresa tra 1.95 e 3.6 V, con assorbimento di corrente tra 6 A e 165 A a seconda della modalità operativa. Il package è di tipo QFN a 16 pin di dimensioni 3 mm x 3 mm x 1 mm. La RD4247MAG3110 (Figura 4) è una scheda di valutazione che consiste di daughter card con i suddetti sensori e scheda di comunicazione con un PC host via porta USB; il kit può essere utilmente adottato per valutare prestazioni e caratteristiche dei dispositivi Xtrinsic Freescale in applicazioni del tipo presentato.
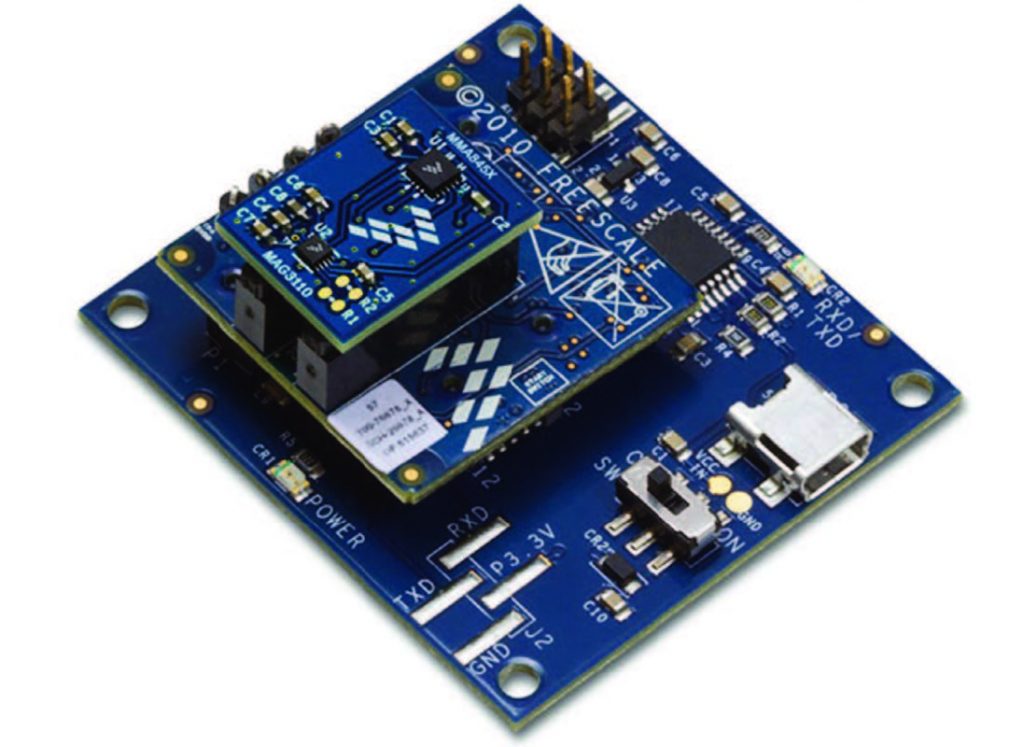
Figura 4: kit di valutazione per magnetometro della serie Xtrinsic di Freescale