
Gli ingegneri agricoli della Penn State hanno sviluppato, per la prima volta, un prototipo di end-effector in grado di rimuovere abilmente le mele indesiderate dagli alberi, il primo passo verso il diradamento robotizzato dei frutti verdi.
Un team di ingegneri ha progettato il primo passo per il diradamento robotizzato dei frutti verdi, attraverso un prototipo di end-effector in grado di rimuovere abilmente le mele indesiderate dagli alberi, semplicemente collegando l'end-effector con un manipolatore robotico. Il sistema robotico dimostra il potenziale per rimuovere la frutta in diverse posizioni e orientamenti, riducendo così l'attività manuale, compito ad alta intensità di manodopera. Inoltre, la diminuzione della forza lavoro nella produzione di mele rende il diradamento manuale economicamente irrealizzabile. Il gruppo di ricerca presso il College of Agricultural Sciences ha condotto uno studio che ha portato all'end-effector. Prima di progettare l'end-effector, i ricercatori hanno eseguito una serie di test dinamici di rimozione dei frutti per determinare le forze necessarie per il diradamento robotico. Il raccolto di mele è infatti una attività agricola di alto valore negli Stati Uniti, con una produzione totale annua di quasi 10 miliardi di sterline e un valore di quasi 3 miliardi di dollari, e in tal senso l'utilizzo di componenti automatizzati aumenta l'efficienza del processo di raccolta. Il diradamento dei frutti verdi, ovvero, il processo di scarto dei frutti in eccesso, avviene all'inizio dell'estate, principalmente per aumentare la dimensione e la qualità dei frutti rimanenti e rappresenta uno degli aspetti più importanti della produzione di mele.
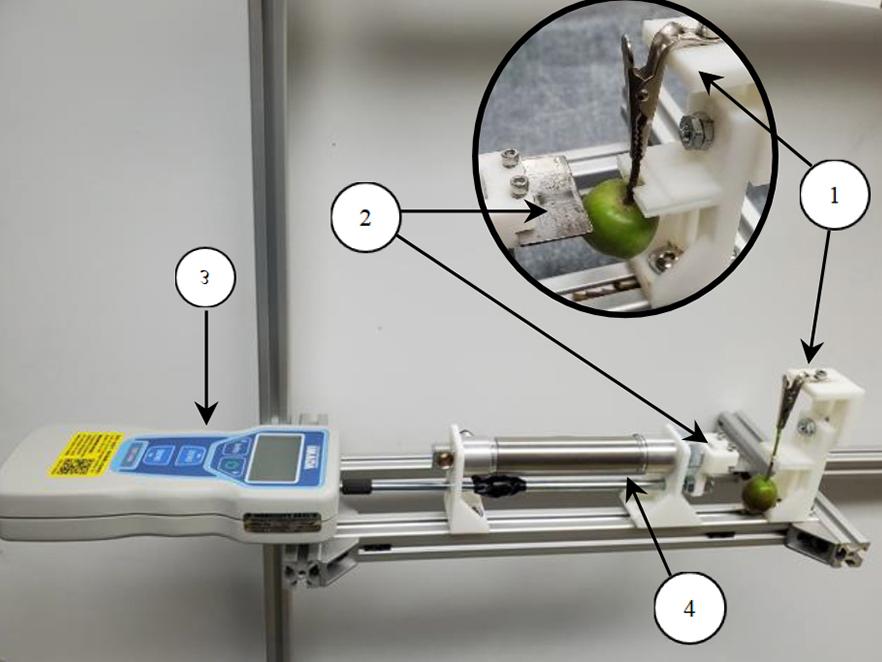
Il set-up per la misurazione delle forze di rimozione dei frutti verdi per il taglio del gambo comprende un supporto di tenuta del gambo, una lama per il taglio del gambo, un dinamometro digitale e un'asta di trasferimento della forza. Il lavoro è stato svolto presso il Fruit Research and Extension Center della Penn State a Biglerville, nella Pennsylvania centro-meridionale. Dopo aver scoperto che la rimozione dei frutti con il metodo di estrazione ha comportato un elevato numero di distacchi dello stelo dall'estremità dello sperone, che può lasciare una ferita che colpisce i frutti vicini in un grappolo, è stato costruito un prototipo di end-effector per il taglio dello stelo e sono stati condotti numerosi test sul campo. Sono state testate due configurazioni prototipo di end-effector: una posizionando l'end-effector su una barra portatile, l'altra integrando l'end-effector con un manipolatore robotico. I ricercatori hanno inoltre riferito che le percentuali di successo della rimozione dei frutti verdi per tutti gli esperimenti sui prototipi di end-effector erano superiori al 90%.
Il progetto è disponibile qui:

