Vediamo in questo articolo della rubrica Firmware Reload una breve trattazione sugli alimentatori switching di tipo flyback e sulla questione dell’isolamento tra ingresso e uscita.
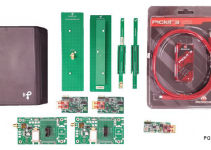
La conversione della tensione di rete in una tensione continua utilizzabile da un apparato elettronico può avvenire tramite un trasformatore di rete a 50 Hz, oppure per mezzo di uno switching collegato direttamente alla rete, e perciò denominato in inglese, off-line. Un requisito essenziale per tutti gli alimentatori è l’isolamento galvanico tra l’uscita e la rete elettrica: se non ci fosse l’isolamento galvanico tra la rete elettrica e la massa della presa, toccando contemporaneamente quest’ultima e la terra potremmo trovarci nella situazione di shock elettrico di Figura 1. Per questo motivo, nella stragrande maggioranza dei dispositivi elettronici, la massa elettrica circuitale non è MAI collegata galvanicamente alla rete, ma è da questa isolata per mezzo di opportuni dispositivi.
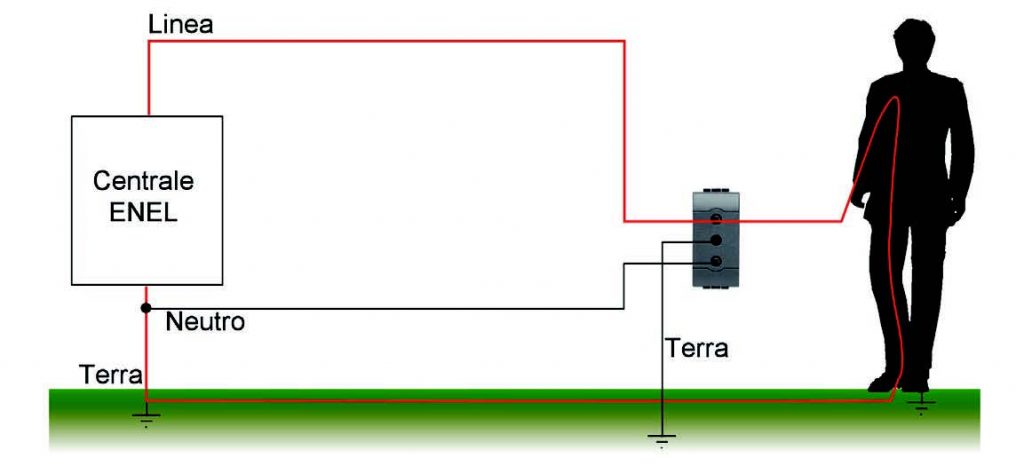
Figura 1: Shock elettrico per contatto tra fase e terra
LA TIPOLOGIA “FLYBACK”
Questa tipologia di alimentatore switching è usata moltissimo in campo consumer, grazie alle sue caratteristiche di semplicità, quindi economicità ed affidabilità. Lo schema elettrico di principio è riportato in Figura 2.
Figura 2: Schema di principio per tipologia “flyback”
Ovviamente, come interruttore 1 è possibile utilizzare anche un transistor bipolare NPN, oppure un PMOS collegato tra VIN+ e il “pallino” del primario, collegando l’altro capo del trasformatore a massa. Analogamente, anche se in figura è stato utilizzato un diodo schottky come interruttore 2, nei casi appropriati questo potrà o anzi dovrà essere di tipo standard veloce. Si nota immediatamente che, quando l’interruttore 1 è attivo, la tensione di ingresso viene applicata ai capi del primario del trasformatore, con il polo positivo coincidente con il “pallino”. Per le note regole sui trasformatori, la tensione di ingresso, moltiplicata per il rapporto Ns/Np, sarà presente anche sul secondario, sempre con il polo positivo coincidente con il “pallino”. Dalla Figura 2 è però immediato vedere che il diodo 2, con la polarità indicata, è polarizzato inversamente e quindi non fa passare alcuna corrente. Questa è la caratteristica fondamentale della tipologia flyback, che lo differenzia radicalmente dalla forward: durante il periodo di ON, nessuna corrente scorre dall’alimentatore di ingresso verso il carico. Piuttosto questa corrente, che ovviamente sale a rampa poiché scorre in un’induttanza (il primario del trasformatore), viene convertita in energia magnetica ed immagazzinata nel nucleo del trasformatore.
A differenza della tipologia forward, in cui il trasformatore è un mezzo di trasporto dell’energia in tempo reale, nella tipologia flyback il trasformatore ha la funzione di un vero e proprio serbatoio, che prima viene riempito (fase ON) e solo dopo viene svuotato (fase OFF). I diagrammi della Figura 3 chiariscono meglio il concetto. Dal grafico verde di Figura 3, notate che ho disegnato la curva Is (corrente nell’avvolgimento secondario) in modo che la corrente scenda a zero PRIMA dell’inizio del nuovo ciclo di ON. Come immaginerete, questa modalità di funzionamento, che si impone attraverso la scelta del trasformatore e della frequenza di funzionamento, prende il nome di modalità DISCONTINUA, abbreviato a volte come DCM. Nel caso che invece la corrente non riesca a scendere a zero prima dell’inizio del ciclo ON successivo, si parla di modalità CONTINUA o CCM, e i diagrammi delle correnti Ip e Is si modificano con l’aggiunta di uno scalino. In generale, la modalità DCM fornisce una risposta ai transitori più rapida. Il prezzo che si paga è quello di una maggiore corrente di picco, a parità di caratteristiche, rispetto alla CCM. Nella maggioranza dei casi, la tipologia flyback viene impiegata in modalità DCM, ed è questa quindi che andremo ad analizzare ed utilizzare.
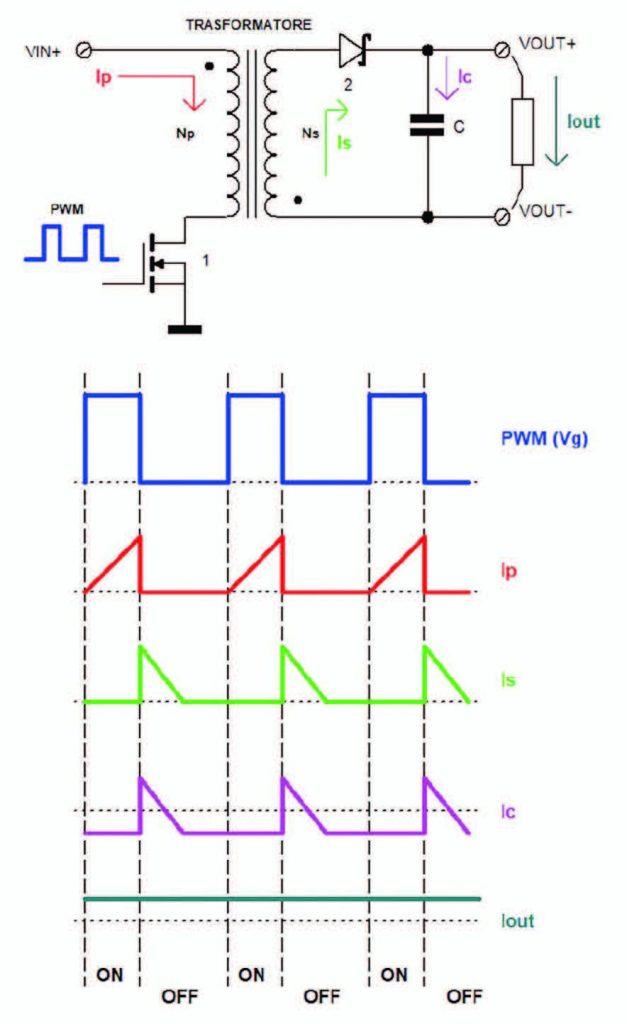
Figura 3: Forme d’onda caratteristiche per tipologia “flyback”
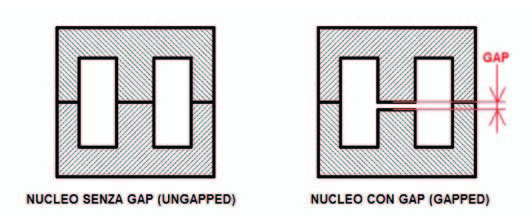
Figura 4: Nucleo ad “E” senza “gap” e con “gap”
PARAMETRI DI PROGETTO
Supponiamo di voler realizzare un alimentatore switching, di tipo “flyback”, avente le seguenti caratteristiche:
VIN,NOM = 24 VDC ±25%, cioè:
VIN,MIN = 18 VDC
VIN,MAX = 30 VDC
VOUT = 5 VDC
IOUT,MAX = 1 A
TIPOLOGIA “FLYBACK”:
Calcoli preliminari:
- La potenza di uscita massima è data da:
POUT,MAX = VOUT * IOUT,MAX = 5 * 1 = 5 W - Se l’efficienza viene fissata al 75% la potenza massima assorbita dall’ingresso risulta: PIN,MAX = POUT,MAX/0,75 = 5/0,75 = 6,667 W
- Ad ogni ciclo ON, l’energia immagazzinata nel trasformatore (cioè nell’induttanza del primario) si calcola con la: EL = 0,5 * Lp * (Ip,MAX)2
- La totalità di questa energia viene trasferita al carico, per mezzo dell’avvolgimento secondario, ad ogni ciclo. Quindi la potenza trasferita, pari all’energia erogata in un secondo, è data da EL * fSW (fSW è la frequenza di switching) e deve essere uguale alla PIN,MAX calcolata al passo 2: PIN,MAX = EL * fSW = 0,5 * Lp * (Ip,MAX)2 * fSW
- Consideriamo ora che la Ip,MAX dipende a sua volta (oltre che dall’induttanza del primario Lp), anche dalla tensione di ingresso e dal tempo di ON, secondo la nota formula: Ip,MAX = (VIN – VDROP)/Lp * TON (VDROP è la caduta totale di tensione sul MOS e sulle resistenze)
- Dai passi 4 e 5 precedenti, si ottiene con semplici manipolazioni algebriche: PIN,MAX = 0,5 * (VIN – VDROP)2 * TON 2 * fSW/Lp
Nel caso peggiore, vale ovviamente la VIN = VIN,MIN. Ipotizziamo poi VDROP = 1 V per le cadute resistive; come al solito, se alla fine questa ipotesi dovesse risultare troppo distante dalla realtà, sarà possibile tornare a questo passo sostituendo il valore più corretto. Nel caso di utilizzo di tipologia di controllo Current Mode, come è il caso in questo esempio, è bene che il duty-cycle non superi il 50%. In caso contrario sappiamo che sarebbero richiesti componenti aggiuntivi per effettuare la cosiddetta “slope compensation”. Per sicurezza utilizziamo il valore massimo del 45% per il duty-cycle, quindi TON = 0,45 * (1/fSW), e sostituendo otteniamo:
PIN,MAX = 0,5 * (18 – 1)2 * 0,452 * (1/fSW)2 * fSW/Lp
Questo valore deve essere maggiore o almeno uguale al valore desiderato, cioè 6,667W. Effettuando i calcoli e semplificando, si ottiene la:
Lp * fSW <= 4,389
Resta ancora una volta dimostrato che esistono, in teoria, infinite coppie Induttanza/ Frequenza che soddisfano i criteri desiderati per un alimentatore switching. La configurazione flyback utilizza il nucleo magnetico in un solo quadrante B-H (la corrente nel primario scorre sempre in una sola direzione), a differenza dei due quadranti sfruttati dalla push-pull, e quindi è possibile usare il nucleo E20/10/6 che è chiaramente sovradimensionato, ma è facile da reperire e le “ampie” dimensioni faciliteranno la realizzazione degli avvolgimenti. Scelto il nucleo, restano da definire altri due aspetti, il tipo di materiale, che dipende strettamente dalla frequenza operativa; il “gap”, cioè lo spazio vuoto esistente tra la gambe centrali di molti nuclei in ferrite, vedi Figura 4.
Considerando che l’aria non è un materiale ferromagnetico, in generale (mediamente) la capacità di allineamento delle isole magnetiche diminuirà. La diminuzione della permeabilità del nucleo implica che per ottenere la stessa induttanza, saranno necessarie più spire nell’avvolgimento, ma questo di per sé non è solo uno svantaggio, infatti l’aggiunta del “gap” in un nucleo magnetico, aumenta la sopportazione di corrente, cioè la corrente massima che è possibile fare scorrere sull’avvolgimento prima del raggiungimento della saturazione. Questa caratteristica è di fondamentale importanza in tutti i casi in cui l’induttanza o il trasformatore sono attraversati da grandi correnti. Vedremo che questo è il caso della tipologia flyback, in modalità discontinua. Per uno switching, funzionante a frequenza sicuramente minore di 100 kHz, si può scegliere un nucleo in materiale standard, quale l’N27 della EPCOS o equivalenti di altre case. La scelta del “gap” necessario richiede qualche calcolo in più. Infatti, notate che il nucleo E20/10/6 viene fornito dalla EPCOS in 5 differenti versioni:
Senza gap (g = 0)
Con gap da 0,09 mm
Con gap da 0,17 mm
Con gap da 0,25 mm
Con gap da 0,50 mm
Il problema è dunque il seguente: Come calcolare il numero di spire necessarie per ottenere un dato valore di induttanza, con un certo nucleo magnetico? La risposta teorica sarebbe abbastanza complicata, in quanto deve tener conto di diversi fattori come la forma del nucleo, le sue dimensioni, il tipo di materiale magnetico, eccetera. Per ogni nucleo e materiale magnetico, esiste un valore AL che, moltiplicato per il numero delle spire al quadrato, fornisce l’induttanza. Matematicamente:
L = AL * N2
Il valore AL, in genere in nanoHenry (nH, 10-9 Henry), è riportato nei datasheet. Per fare un esempio, il nucleo E20/10/6, senza GAP, di materiale N27, presenta un valore di AL uguale a 1300 nH, con ampia tolleranza (+30% -20%). Se con questo nucleo volessimo realizzare un’induttanza del valore di 100 H, occorrerebbero quindi, invertendo la formula precedente:
N = (L/AL)0,5 = (100e-6/1300e-9)0,5 = 8,77 spire, arrotondate a 9
Il nucleo accettabile è quello con gap = 0,17 mm, fatto funzionare alla frequenza di 80kHz. Questo garantisce di evitare la saturazione in corrispondenza della corrente massima. Una possibile realizzazione di uno switching flyback (testata e funzionante) è riportata in Figura 5.
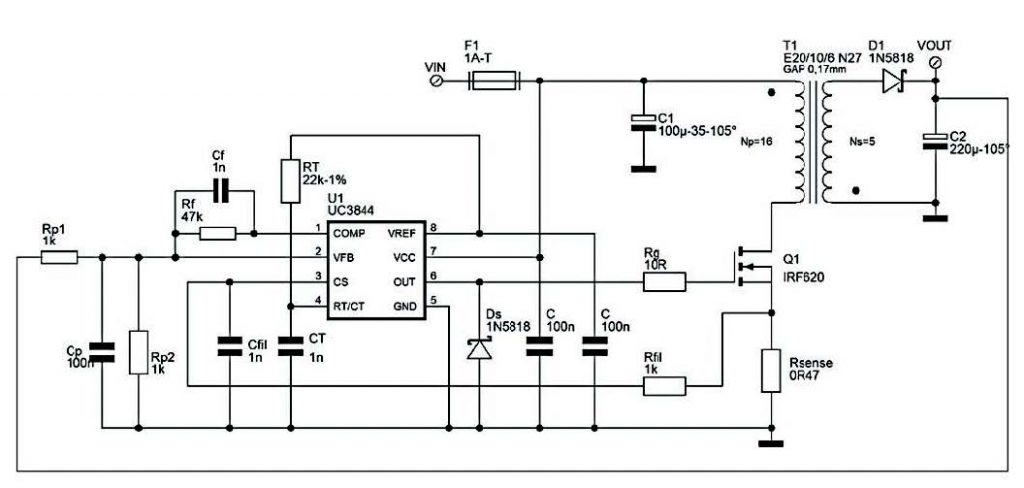
Figura 5: Switching 5V-1A in tipologia flyback