Puntata 2 dell'articolo "Un Controller per i Motori Brushless DC" della Rubrica Firmware Reload.
CONTROLLO MOTORE MEDIANTE “SQUARE-WAVE PWM”
Come anticipato, ci sono due modalità di controllo motore, sinusoidale (Sine-Wave) e ad onda quadra (Square-Wave). In più, per la gestione a onda quadra, sono due le possibili modalità di commutazione PWM: PWM-PWM e PWM-ON. La modalità PWM-PWM viene utilizzata per avviare il motore. Nel caso in cui il controller è usato in modo stand-alone, generalmente viene utilizzata automaticamente la modalità sinusoidale. Mentre, nel caso in cui il controller è pilotato da un microprocessore mediante protocollo SPI, dopo l’avvio del motore, il microcontrollore può decidere se mantenere la commutazione PWM-PWM, se cambiarla in PWM-ON o se utilizzare il segnale sinusoidale.
Modalità PWM-PWM
In riferimento alla Figura 1, con il rilevamento a 120° della posizione del polo magnetico del rotore, ogni passaggio N- S esegue 360° sui tre sensori Hall, in modo che si verificano solo sei variazioni di segnale. Fino a quando le direzioni delle correnti corrispondenti sono fornite dagli avvolgimenti trifase degli statori basate su sei variazioni di segnale, il campo magnetico rotante viene generato per far ruotare i rotori. Ogni tipo di segnale Hall corrisponde a un tipo di uscita PWM. Ci sono sei diversi tipi di output PWM a 360° e con una commutazione si verificano ogni 60°, pertanto, è chiamato anche driver a sei step ad onda quadra. L’uscita dell’onda quadra sei fasi è mostrata nella Figura 1.
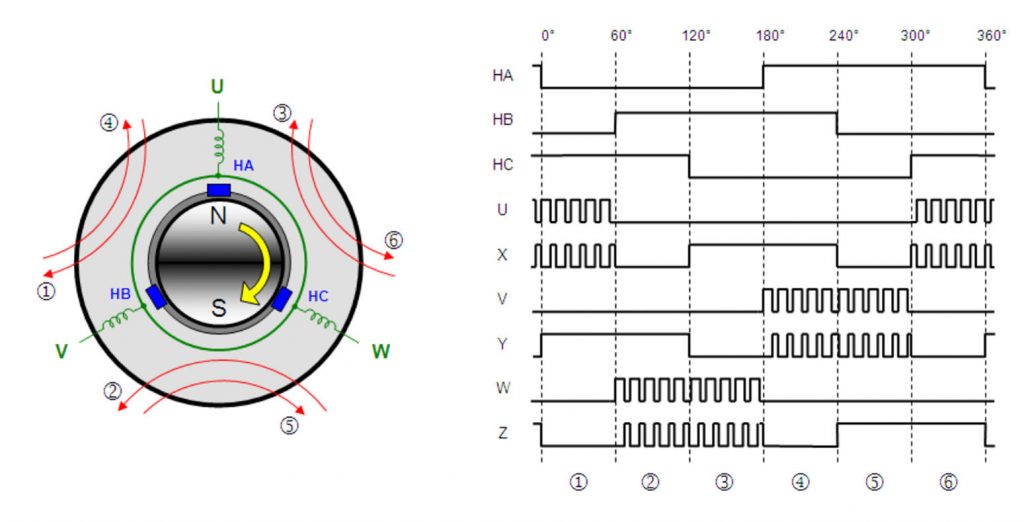
Figura 1: Modalità PWM-PWM
In tutti i casi, una di queste tre fasi PWM è continuamente generata ogni 120° (due punti) e quindi ogni uscita PWM viene generata ogni due step, perciò tale modalità è chiamata commutazione PWM-PWM. Con una configurazione di questo tipo è notevolmente facilitato l’uso di questo integrato con circuiti “High-Side” dato che entrambi utilizzano MOSFET a canale N o IGBT come circuito di pilotaggio per il motore. Lo stadio di uscita del controllore FCM8201 include un circuito di pilotaggio alquanto semplice che non richiede particolare attenzione per l’eventuale mancata o parziale accensione del MOSFET high-side; tra le due fasi di uscita PWM continua, le correnti negative possono ritornare verso l’alimentazione quando si hanno dei fronti bassi sulle altre due fasi, come illustrato nella Figura 2.
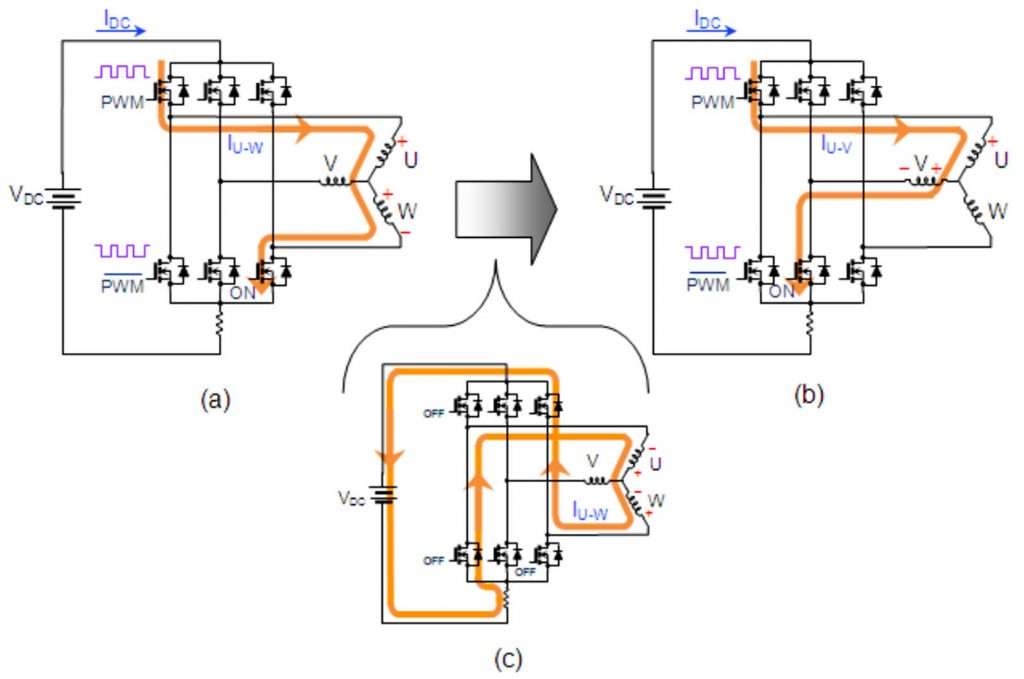
Figura 2: Commutazione tra U-W e U-V
Tale corrente negativa è una delle principali fonti di rumore per un azionamento a onda quadra, infatti, quando è generata l’uscita PWM dalla fase U nell’istante di conduzione “low-side” della fase W e V, l’energia immagazzinata nell’induttanza “diventa negativa” e ritorna verso l’alimentazione attraverso il diodo integrato nel MOSFET high-side della fase W. In questo modo, si genera corrente negativa.
Modalità PWM-ON
Per evitare la generazione di corrente negativa nella modalità precedente PWM-PWM e di ridurre il rumore ad onda quadra, il controller FCM8201 fornisce la modalità di commutazione PWM-ON. Come mostra la Figura 3, la differenza tra PWM-PWM e PWM-ON sta nel passaggio dallo step 2/4/6 allo step 3/5/1. Durante la fase in cui il MOSFET high-side genera l’output PWM alto, un’altra fase prende posto per l’uscita PWM bassa. In questo modo, l'induttanza degli avvolgimenti trifase, che dà luogo a inversione di polarità e di conseguenza genera corrente inversa, non viene più generata. Inoltre, la direzione della corrente e il campo magnetico coerenti con la modalità PWM-PWM vengono mantenuti. Per maggiori informazioni riguardanti la configurazione e l'utilizzo dell'FCM8201 si faccia riferimento al foglio specifiche scaricabile direttamente dal sito della Fairchild.
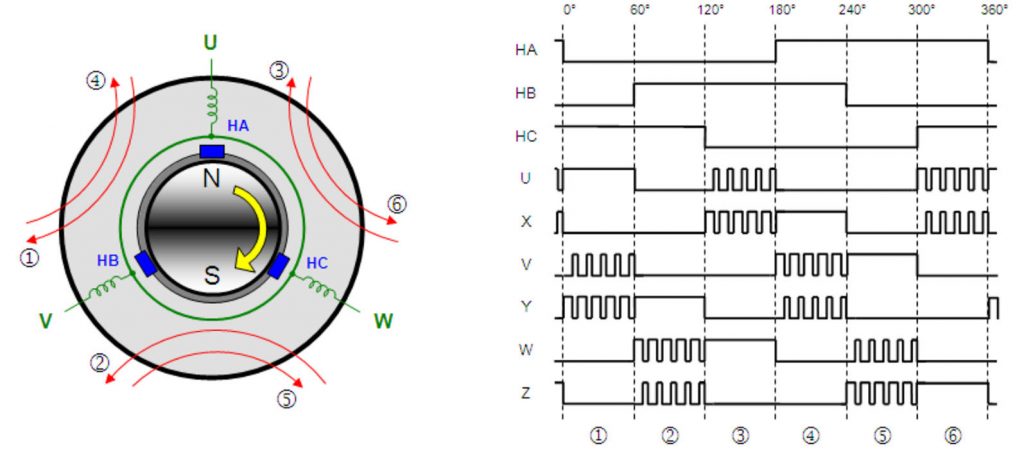
Figura 3: Modalità PWM-ON
CONCLUSIONI
Recentemente, grazie alla spinta commerciale legata alla richiesta di prodotti a elevata efficienza energetica nel settore civile, i motori brushless sono stati introdotti su vari mercati come quello del condizionamento e/o della refrigerazione, dove si possono ottenere elevati benefici in termini di consumi a favore dei grandi utilizzatori; esistono anche applicazioni navali di tali motori con tecnologie a superconduzione che hanno potenze dell’ordine dei MW! Questo fa capire perché la loro diffusione e di conseguenza anche quella dei controller come quello della Fairchild appena analizzato, sia sempre maggiore.