
I ricercatori dell'Università di Coimbra in Portogallo hanno recentemente sviluppato una nuova mano robotica, morbida e scalabile, basata su più materiali, che potrebbe essere più economica e anche più semplice da fabbricare. Il design integra attuatori morbidi con un esoscheletro, entrambi i quali possono essere prodotti utilizzando tecniche scalabili.
Un team di scienziati portoghesi ha creato una mano robotica morbida e scalabile basata sull'utilizzo di più materiali. Solitamente, i robot basati su materiali morbidi sono spesso migliori nel replicare l'aspetto, i movimenti e le abilità sia degli esseri umani che degli animali. Allo stato attuale, tuttavia, ci sono innumerevoli robot morbidi, molti di questi sono difficili da produrre su larga scala, a causa dell'alto costo dei loro componenti o del complesso processo di fabbricazione. Inoltre, gran parte dei robot sono fatti di materiali rigidi, ma quando si osservano gli animali, si nota che i loro corpi possono essere composti da parti dure, gli scheletri, e parti molli, come lo sono i muscoli. Prendendo ispirazione dalla natura, possiamo immaginare che la prossima generazione di robot incorporerà componenti realizzati con materiali morbidi o, in alcuni casi, essi possono essere anche completamente morbidi.
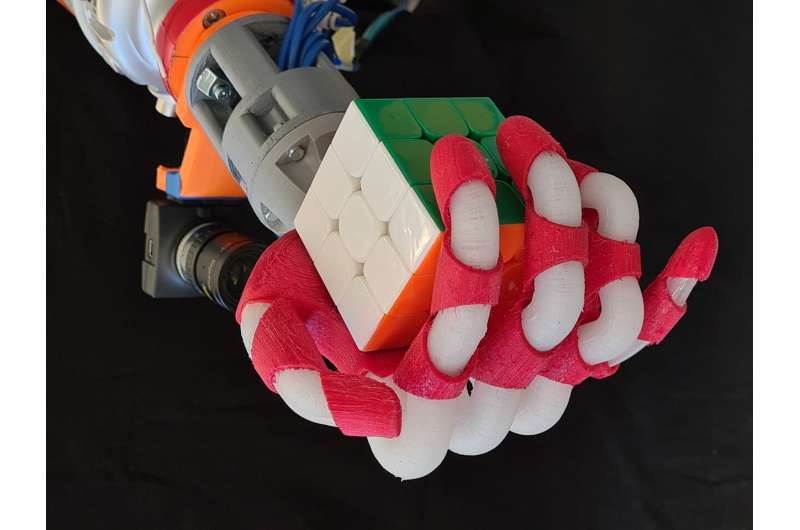
Rispetto ai robot rigidi, i sistemi robotici morbidi potrebbero essere più sicuri e in grado di coesistere meglio con esseri umani o animali sia in ambienti esterni che interni. L'obiettivo principale del recente lavoro del team di ricercatori era quello di sviluppare una nuova mano robotica morbida che fosse sicura e allo stesso tempo conveniente. Tale mano sarebbe teoricamente più facile da implementare su larga scala, alimentando così nuove ricerche e innovazioni nel campo della robotica. Durante la creazione del progetto, è stata utilizzata l'analisi degli elementi finiti per ottimizzare il progetto prima di fabbricare fisicamente la mano, riducendo così i costi di prototipazione. L'utilizzo della stampa 3D si è rivelato molto efficace stampando direttamente alcuni componenti in materiali morbidi e gli stampi in materiali rigidi. La morbida mano robotica creata dai ricercatori si basa su diversi materiali: la struttura accuratamente progettata aveva lo scopo di replicare l'aspetto e la funzionalità delle mani umane, riproducendo i loro movimenti e le abilità degli arti. La configurazione della mano robotica consiste in cinque attuatori morbidi, ciascuno dei quali corrisponde a un dito, e un esoscheletro per promuovere la piegabilità delle dita; inoltre, un controller ON-OFF mantiene determinati angoli di flessione delle dita, consentendo alla mano di afferrare efficacemente oggetti di varie forme, pesi e dimensioni.
I ricercatori hanno finora valutato le prestazioni della mano robotica in una serie di simulazioni ed esperimenti. I risultati iniziali sono molto promettenti, poiché la mano potrebbe afferrare con successo numerosi oggetti con forme, peso e dimensioni differenti. Il contributo principale è il sistema integrato di progettazione-fabbricazione che si basa sull'analisi degli elementi finiti per ottimizzare la progettazione prima della fase di fabbricazione. Questo risultato ha il potenziale per aumentare l'accessibilità delle mani robotiche morbide, riducendo i costi ed eliminando le procedure di progettazione-fabbricazione molto dispendiose in termini di tempo, che spesso si basano su flussi di lavoro iterativi ad alta intensità di risorse. In futuro, la mano robotica morbida sviluppata da questo team di ricercatori potrebbe essere ampiamente impiegata sia da team accademici che da singoli robotici per testare nuovi algoritmi di Intelligenza Artificiale (AI) e altri strumenti computazionali volti a far progredire le abilità dei robot. Il suo design potrebbe aprire nuove strade per la fabbricazione a basso costo di robot umanoidi in grado di assistere gli esseri umani nelle loro attività quotidiane. In previsione, il lavoro del team portoghese si focalizzerà ulteriormente sull'obiettivo di migliorare l'accessibilità dei robot morbidi a un pubblico più ampio. Il controllo dei robot morbidi che utilizzano modelli di Intelligenza Artificiale sarà un tema caldo per la ricerca di nuove tecnologie.
Note e Riferimenti
Samuel Alves et al, Integrated Design Fabrication and Control of a Bioinspired Multimaterial Soft Robotic Hand, Cyborg and Bionic Systems (2023)


