Giuseppe Silano
Appassionato sin da piccolo al mondo dell'elettronica e dell'informatica, la scelta del percorso di studi è stata naturale: laurea triennale in Ingegneria Informatica, magistrale in Ingegneria Elettronica, entrambe curriculum controlli automatici, e dottorato di ricerca in Tecnologie dell'Informazione per l'Ingegneria. Ora è un tenured researcher presso Ricerca sul Sistema Energetico (RSS) S.p.A. e un associate researcher presso la Czech Technical University di Praga dove si occupa di progettazione di sistemi autonomi per velivoli sprovvisti di pilota e smart grids.
Giuseppe Silano Blog
L'articolo fa parte delle tre puntate focalizzate sui sistemi embedded, quali Arduino e Raspberry Pi. In questa seconda puntata ci occuperemo della realizzazione di un sistema trasmissione e ricezione di segnali digitali ed analogici utilizzando Arduino, xBee e pochi altri …
Il seguente articolo si pone l'obiettivo di offrire un focus pratico di approfondimento sui sensori per sistemi embedded, quali Arduino e Raspberry Pi. Dato l'ampio respiro della trattazione, il tutto è diviso in più puntate. In questa prima puntata si …
Un motore DC (Direct Current), anche noto con l'acronimo CC (Corrente Continua), è uno qualsiasi di una classe di motori elettrici rotanti che converte l'energia elettrica a corrente continua in energia meccanica. I tipi più comuni si basano sulle forze …
La robotica è un dominio multidisciplinare in continua espansione in vari ambiti della ricerca, dell'industria manifatturiera, della sanità e persino nella vita quotidiana. Tuttavia, come una qualsiasi altra tecnologia in evoluzione, la robotica deve affrontare numerose sfide. In questo contesto, …
Recenti studi stimano un contributo del traffico ferroviario in Europa entro il 2025 almeno pari al 10% per i passeggeri e del 15% per i veicoli, rispetto al totale della mobilità di persone e mezzi. Tale tendenza è evidente anche …
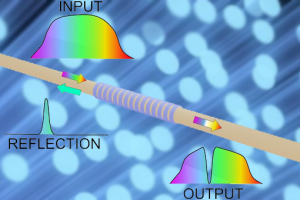
Il campo delle comunicazioni con fibre ottiche è esploso negli ultimi due decenni. Nei moderni sistemi di comunicazione, vengono utilizzate fibre sottili come capelli costituite principalmente da vetro di silice. Le fibre ottiche si basano sul principio della riflessione totale …
Percepire l'ambiente che ci circonda è un requisito fondamentale per un qualunque sistema decisionale. Difatti, qualunque sia l'azione di controllo da intraprendere, è necessario conoscere l'ambiente ed avere una misura dell'affidabilità dei dati a disposizione. Spesso le informazioni sono acquisite …
I robot autonomi sono sistemi complessi che richiedono l'interazione tra numerosi componenti eterogenei (software e hardware). I middleware robotici nascono come risposta all'aumento della complessità delle applicazioni robotiche e della vasta gamma di hardware. Sono progettati per promuovere l'integrazione di …
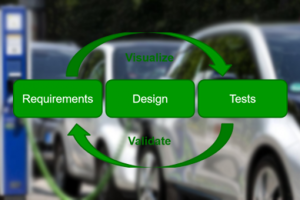
L'articolo presenta un'indagine sui modelli matematici esistenti di veicoli elettrici seguita da approcci all'avanguardia sulla modellizzazione dell'ibridazione delle fonti energetiche. Viene discussa in dettaglio la rappresentazione matematica del veicolo elettrico (EV, Electric Vehicle) che va dai semplici modelli a singolo …
Le reti di sensori wireless o Wireless Sensors Networks (WSN) rappresentano il più diffuso esempio di sistema di misura digitale, basti pensare ai moderni smartphone. Lo sviluppo delle reti 5G e dell'Internet of Things ha innalzato il livello di interesse …
Tanti anni sono passati dall'invenzione del primo transistor a semiconduttore, nonché dalla famosa legge di Moore. Questa invenzione ha condizionato il mercato e l'intera era tecnologica, e la condiziona ancora oggi. L'articolo ripercorre la storia dei transistor: dalla loro nascita, …
Il problema di controllo e monitoraggio è uno dei più importanti negli ambienti industriali, da questo derivano le azioni che governano i cicli produttivi nonché i processi di manutenzione. Per questa ragione, al giorno d'oggi sempre più aziende investono nella …
Il problema della pianificazione del percorso per robot mobili è sempre stato oggetto di ricerca, sin dalle prime applicazioni della robotica. Oggi, con l'avvento dell'Industria 4.0, le ricerche si concentrano su sistemi autonomi capaci di pianificare in pochi istanti i …
L'articolo affronta lo sviluppo di un’applicazione "pick and place" per un robot manipolatore in ambiente MATLAB/Simulink, uno dei problemi classici nella smart manufacturing. L'articolo mostra come rilevare e riconoscere un oggetto attraverso una fotocamera RGB-D, eseguire calcoli di cinematica diretta ed …
In questo articolo è presentato il modello e l'algoritmo di controllo sviluppato per la guida di un robot mobile capace di seguire una parete (wall follower), principio utilizzato poi per realizzare un robot pattugliatore. Arduino, in particolare la versione Mega 2560, è stato scelto come unità …
L'obiettivo dell'articolo è mostrare come sia possibile realizzare un Safety Tutor System, un rilevatore di velocità media, utilizzando Arduino UNO ed una coppia di sensori ad ultrasuoni HC-SR04. Il sistema è in grado di rilevare la velocità media di un veicolo, …
L'articolo mostra, in chiave educational ed in piccola scala, come realizzare un sensore di velocità acustico passivo utilizzando un semplice microfono per PC ed il software LabVIEW. Il sensore sfrutta l'effetto Doppler per misurare la velocità di spostamento di un veicolo …
Nella realtà tutti i sistemi fisici sono non lineari e approssimativamente lineari solo per piccoli segnali. Spesso risulta inevitabile considerare una non linearità in un sistema di controllo; non linearità presente nel processo da controllare oppure nella strumentazione. In altri …
Lo scopo dell'articolo è fornire una panoramica di un sistema MES astratto illustrandone le componenti sia da un punto di vista tecnologico che funzionale, con particolare riferimento ai flussi di controllo che garantiscono una continuità di produzione automatizzando singole macchine o, addirittura, l'intero …
Le tecniche di deep learning, letteralmente "approfondimento profondo", sono sempre più diffuse ed utilizzate in ambiti differenti ed i più vari. Gli avanzamenti tecnologici, nel calcolo parallelo con le GPU (Graphics Processing Unit), hanno consentito di risolvere problemi che fino a …