Oggigiorno la presenza dei motori brushless DC in molte applicazioni ha portato i produttori di semiconduttori alla realizzazione di dispositivi dedicati al loro controllo per permetterne una più facile gestione. La Texas Instruments risponde a tale richiesta mediante gli integrati appartenenti alla famiglia C2000, rendendo disponibili sia piattaforme hardware che librerie software per uno sviluppo rapido.
INTRODUZIONE
I vincoli economici e molti nuovi standard pongono requisiti sempre più stringenti sui sistemi elettronici. Le nuove generazioni di apparecchi devono avere parametri di prestazione più elevati, come una migliore efficienza ma anche una maggiore riduzione delle interferenze elettromagnetiche. La flessibilità del sistema deve essere alta per facilitare le modifiche di mercato e ridurre i tempi di sviluppo. Tutti questi miglioramenti devono essere raggiunti e allo stesso tempo bisogna ridurre il costo del sistema. La tecnologia dei motori brushless DC (BLDC) permette di ottenere queste e altre caratteristiche.
Tali motori uniscono un’elevata affidabilità con alta efficienza e un costo inferiore rispetto ai comuni motori a spazzola. Sebbene la caratteristica brushless può essere applicata a diverse tipologie di motori (motori sincroni AC, motori passo- passo, motori a riluttanza commutata, motori asincroni AC), il motore BLDC è convenzionalmente definito come un motore sincrono a magneti permanenti con una forma d’onda trapezoidale back-EMF. Vengono ampiamente utilizzati in quanto offrono svariati vantaggi, come ad esempio una coppia meccanica sviluppata costante ma anche un’alta densità di potenza meccanica. Analizziamo un pò di teoria per il controllo dei motori brushless DC e vediamo alcune caratteristiche più importanti riguardo i dispositivi che fanno parte della famiglia di microcontrollori (C2000) ottimizzati e pensati per i motori trifase, che permettono una riduzione dei componenti del sistema e di conseguenza un aumento dell’efficienza, con algoritmi di controllo molto precisi.
I MOTORI BLDC
Il motore BLDC è un motore sincrono a corrente alternata e magneti permanenti del rotore (parte mobile) con avvolgimenti sullo statore (parte fissa). I magneti permanenti creano il flusso di rotore e gli avvolgimenti di statore eccitati creano i poli dell’elettromagnete. Facendo riferimento alla Figura 1, il rotore (equivalente ad una barra magnetica) è attratto dalla fase dello statore eccitato e usando la sequenza appropriata per fornire le fasi statoriche, un campo rotante sullo statore viene creato e mantenuto. Questa azione del rotore, che insegue i poli dell’elettromagnete sullo statore, è l’azione fondamentale utilizzata nei motori sincroni a magneti permanenti. Il cavo tra il rotore e il campo rotante deve essere controllato per produrre la coppia e questa sincronizzazione implica la conoscenza della posizione del rotore.
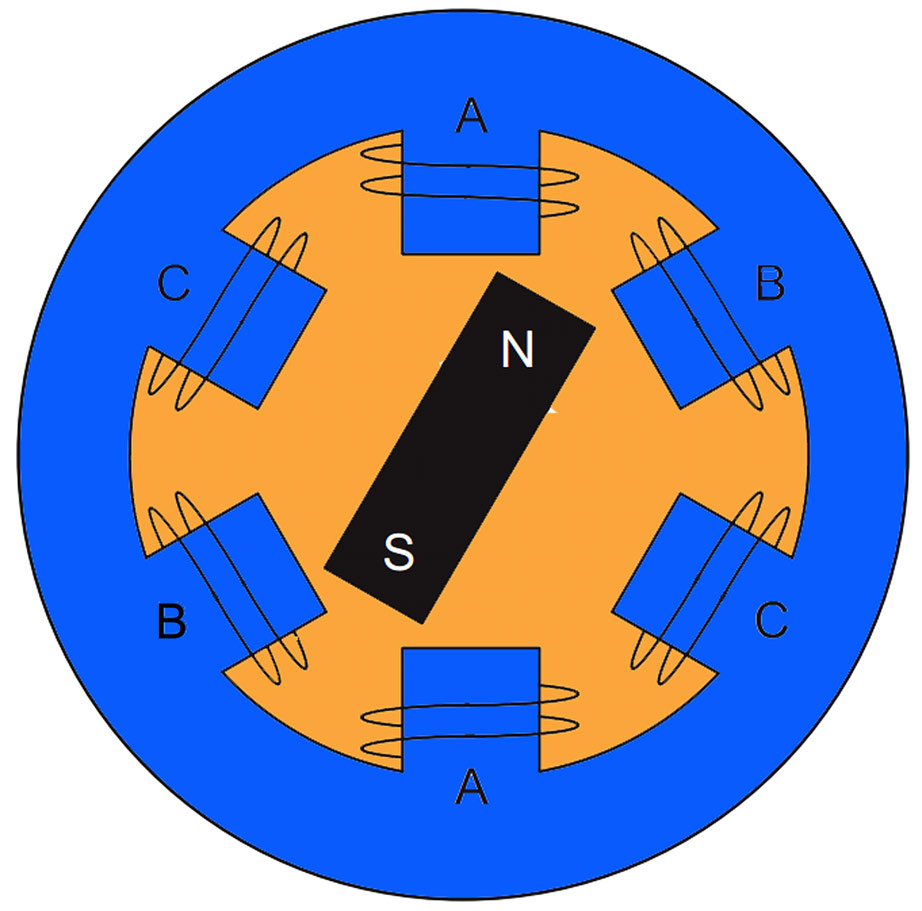
Figura 1: Motore sincrono a tre fasi con un singolo magnete permanente
Per quanto riguarda gli statori, i motori trifase sono i più comuni. Questi offrono un buon compromesso tra un controllo preciso e il numero di dispositivi elettronici di potenza richiesti per controllare le correnti di statore. Per il rotore, un maggior numero di poli, di solito crea una maggiore coppia per un pari livello di corrente ma d’altra parte, con l’aggiunta di più magneti, si raggiunge un punto in cui, a causa dello spazio necessario tra i magneti, la coppia non aumenta più. Il costo di produzione aumenta anche in base al numero di poli, di conseguenza, il numero di poli è un compromesso tra costo, coppia e volume. I motori sincroni a magneti permanenti possono essere classificati in molti modi, ma quella di maggiore interesse è relativa ai profili di back-EMF (forza elettromotrice, termine comunemente usato per riferirsi alla tensione che si ha nei motori elettrici in cui vi è movimento tra l’armatura del motore e il campo magnetico dato dai magneti di campo del motore o avvolgimenti): i motori brushless (BLDC) a corrente diretta e i motori sincroni con magnete permanente (PMSM - Permanent Magnet Synchronous Motor). Questa terminologia definisce la forma della forza contro-elettromotrice del motore sincrono. Possiamo distinguere alcune differenze:
- entrambi i motori hanno magneti permanenti sul rotore, ma si differenziano per le distribuzioni di flusso e profili di back-EMF; come è facile intuire, per ottenere le migliori prestazioni del motore sincrono è importante identificare il tipo di motore, per poter applicare il tipo più appropriato di controllo;
- entrambi i tipi di motore sono macchine sincrone; l’unica differenza tra loro è la forma della tensione indotta, risultante da due diversi modi di cablaggio delle bobine statoriche. La back-EMF è trapezoidale nel caso del motore BLDC e sinusoidale nel caso del motore PMSM;
- i motori BLDC possono essere guidati con correnti sinusoidali e i motori PMSM con correnti continue, ma per migliorare le prestazioni, questi ultimi dovrebbero essere eccitati da correnti sinusoidali mentre i BLDC da correnti continue.
La struttura di controllo (hardware e software) di un motore sinusoidale richiede diversi sensori di corrente e correnti di fase sinusoidali, che sono difficili da ottenere con tecniche analogiche, di conseguenza, molti motori (sia sinusoidali che trapezoidali) sono guidati a corrente continua per ragioni di costo e semplicità (sensori di posizione a bassa risoluzione e unico sensore di corrente a basso costo), compromettendo però l’efficienza e il comportamento dinamico. Le tecniche digitali utilizzate dai DSP C2000 della Texas Instruments consentono di scegliere la metodologia di controllo più adatta per ogni tipologia di motore, ricavando le migliori prestazioni dal sistema e riducendo di conseguenza i costi. Le opzioni possibili utilizzano tecniche “sensorless“ (senza sensori) per ridurre il costo (eliminando quello del sensore) e anche complessi algoritmi che contribuiscono a semplificare la progettazione meccanica abbassando il costo dell’intero sistema.
IL CONTROLLO DEI MOTORI BLDC
Avendo introdotto concettualmente la back-EMF, possiamo affermare che le chiavi per la coppia effettiva e il controllo della velocità di un motore BLDC si riferiscono a equazioni relativamente semplici che sono simili a quelle del motore DC. Per riassumere, la back-EFM è direttamente proporzionale alla velocità del motore e la produzione di coppia è quasi direttamente proporzionale alla corrente di fase. Questi fattori portano a schemi di controllo di velocità del motore BLDC come mostrato in Figura 2.
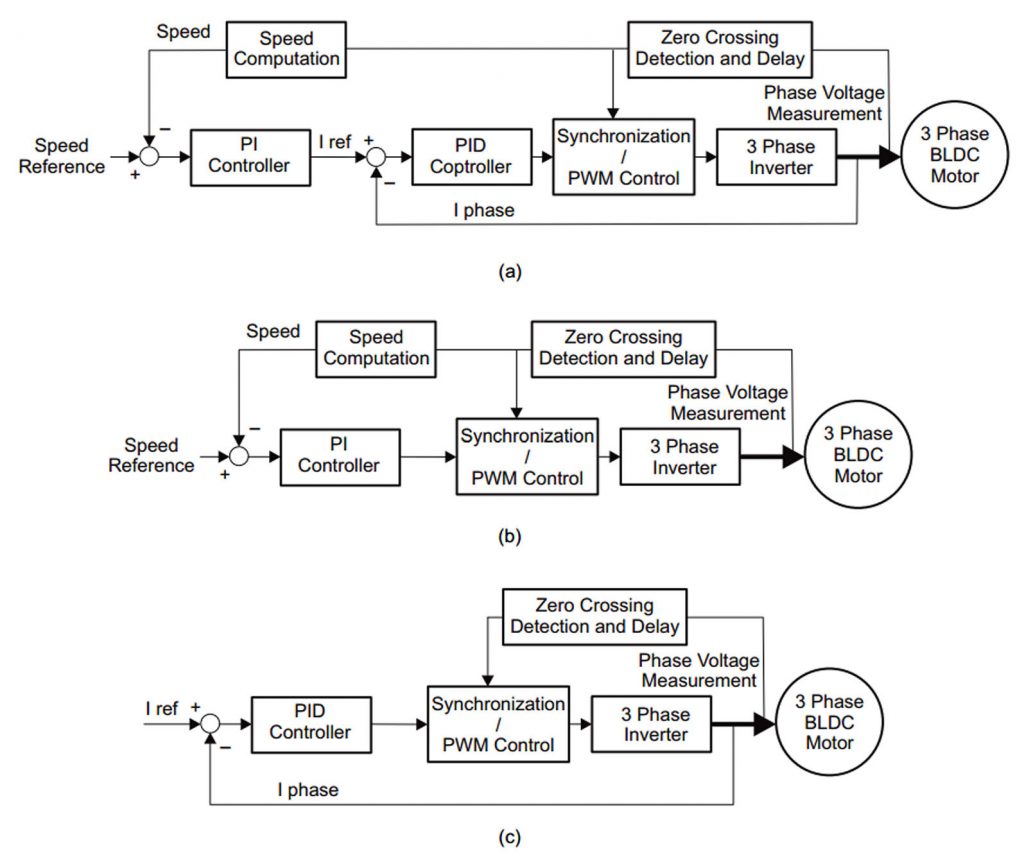
Figura 2: Configurazioni di controllo della velocità e della corrente per motori BLDC
Il motore BLDC è caratterizzato da due fasi “ON” per controllare l’inverter, in questi schemi di controllo, la produzione della coppia segue il principio che la corrente deve fluire in solo due delle tre fasi alla volta e che non ci dovrebbe essere nessuna produzione di coppia nella regione di attraversamento dello zero della back-FEM. La Figura 3 descrive le forme d’onda elettriche nel motore BLDC nelle due fasi di funzionamento.
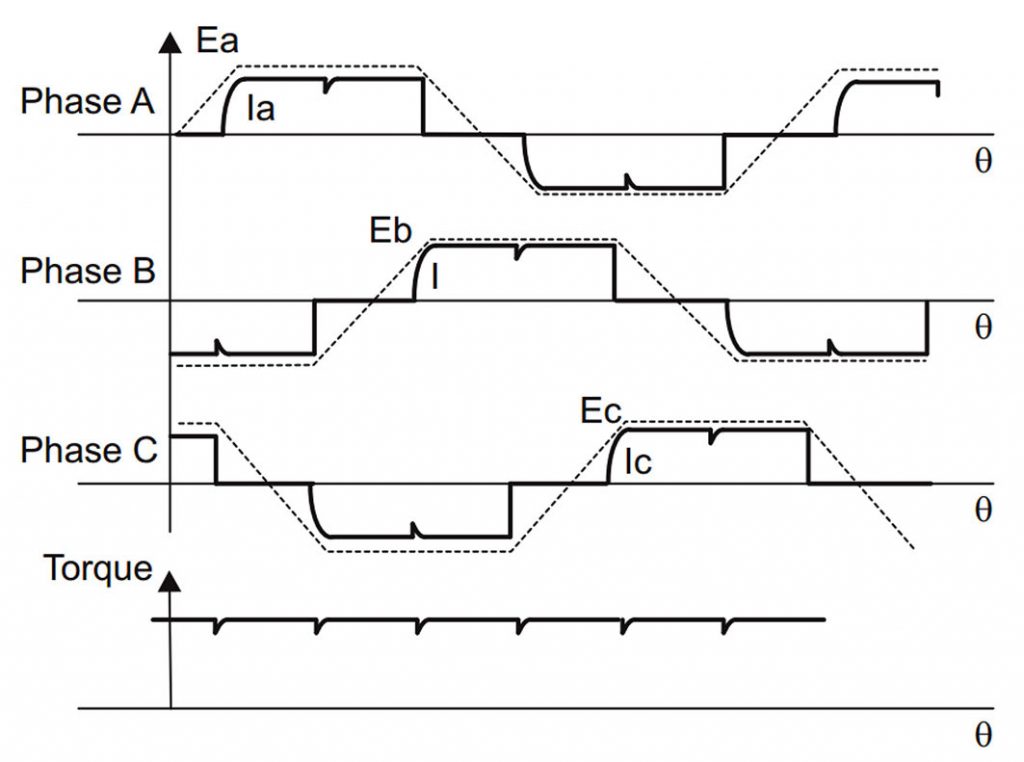
Figura 3: Forme d’onda elettriche nelle due fasi “ON” di funzionamento e il ripple di coppia
Questa struttura di controllo ha diversi vantaggi:
- una solo corrente alla volta deve essere controllata;
- solo un sensore di corrente è necessario;
- il posizionamento del sensore di corrente permette l’uso di sensori a basso costo come uno shunt (per la lettura delle correnti).
Il principio del motore BLDC è che in ogni momento bisogna eccitare la coppia di fase, che può produrre la massima coppia, perciò per ottimizzare questo effetto la forma EMF è trapezoidale. La combinazione di una corrente continua con una trapezoidale rende teoricamente possibile produrre una coppia costante. Facendo riferimento alla Figura 4, in pratica, la corrente non può essere stabilita istantaneamente in una fase del motore, di conseguenza il “ripple di coppia” è presente in ogni fase di commutazione 60°.
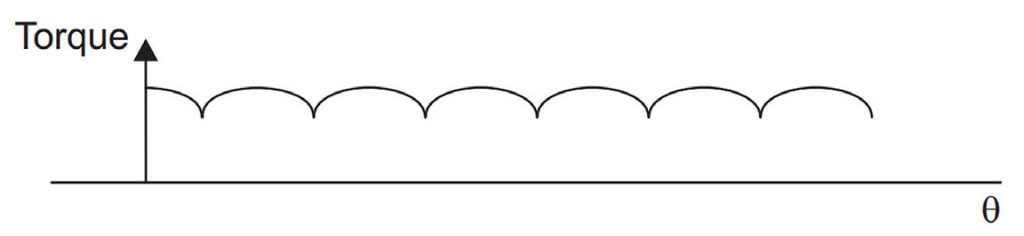
Figura 4: Limiti di memoria delle funzioni di libreria
Se il motore utilizzato ha una forma sinusoidale back-EMF, tale controllo può essere applicato ma la coppia prodotta è:
- non costante ma costituita da porzioni di un’onda sinusoidale, ciò è dovuto al suo essere la combinazione di una strategia di controllo di corrente trapezoidale e di un back-EMF sinusoidale;
- il valore di coppia prodotta è più debole.
Come detto, una caratteristica del controllo BLDC è di avere una sola corrente alla volta nel motore (due fasi ON), di conseguenza non è necessario mettere un sensore di corrente su ciascuna fase del motore; un sensore posto nella linea di ingresso dell’inverter rende possibile controllare la corrente di ciascuna fase. Inoltre, con un sensore sulla linea di terra, non sono necessari sistemi isolati e può essere usata banalmente una resistenza di basso costo.
IL BENEFICIO DELLA FAMIGLIA 32-BIT C2000 DELLA TI
Come abbiamo visto non è banale gestire motori BLDC, ma la famiglia C2000 della TI possiede la potenza di calcolo necessaria per eseguire algoritmi di controllo complessi con la giusta combinazione di periferiche d’interfaccia hardware come, ad esempio: il convertitore analogico-digitale (ADC), l’enhanced pulse width modulator (ePWM), il Quadrature Encoder Pulse (QEP), l’enhanced Capture (ECAP) e così via. Queste periferiche sono tutte necessarie per i sistemi che soddisfano requisiti di sicurezza. In aggiunta la Texas Instruments mette a disposizione software (librerie e applicativo) ma anche hardware (kit applicativi) che aiutano a ridurre il tempo e gli sforzi necessari per sviluppare una soluzione digitale di controllo del motore. La libreria DMC (Digital Motor Control) della TI prevede blocchi configurabili che possono essere riutilizzati per implementare nuove strategie di controllo. I componenti di tale libreria sono stati utilizzati da TI per fornire esempi di sistema e tutte le variabili sono definite e interconnesse nella fase di inizializzazione. In fase di esecuzione, le funzioni macro sono chiamate in ordine.
Ogni sistema è costruito utilizzando un approccio di generazione incrementale, consentendo che sezioni del codice possano essere costruite in tempi diversi per permettere allo sviluppatore di verificare ogni sezione della loro applicazione un passo alla volta. Questo è fondamentale in applicazioni di controllo in tempo reale in cui ci sono così tante variabili diverse che possono influenzare il sistema e devono essere sincronizzati diversi parametri del motore. La libreria IQmath consente una facile migrazione da algoritmi “floating point” ad algoritmi “fixed point” accelerando in tal modo il ciclo di sviluppo. Pertanto, con la famiglia di dispositivi C2000 è facile e veloce implementare complessi algoritmi di controllo (con e senza sensori) per il controllo del motore. L’uso di dispositivi C2000 e schemi di controllo avanzati fornisce vari miglioramenti del sistema, come:
- la riduzione dei costi del sistema di un controllo efficace in tutta la gamma di velocità che implica un corretto dimensionamento dei circuiti dei dispositivi di potenza;
- è possibile ridurre il ripple di coppia, con conseguente riduzione delle vibrazioni e maggiore durata del motore;
- riduzione delle armoniche generate dall’inverter, riducendo il costo del filtro;
- l'uso di algoritmi sensorless elimina la necessità di sensore di velocità o di posizione;
- la generazione in tempo reale dei profili di riferimento quasi ottimali, con conseguente miglioramento delle prestazioni;
- fornisce il sistema di controllo con un unico chip.
Per maggiori dettagli si può far riferimento al sito ufficiale, da cui è possibile effettuare il download di tutto il software necessario per poter utilizzare questa famiglia di integrati.
CONCLUSIONI
Come abbiamo avuto modo di analizzare, la gestione di un motore BLDC non è banale ma, visti i loro vantaggi, la diffusione è in continuo aumento. Fortunatamente molte case di semiconduttori rispondono alla continua necessità di integrati per la gestione di tali motori con dispositivi sempre più complessi e ottimizzati, come il caso della Texas Instruments, che fornisce una famiglia specializzata e dedicata al loro controllo.


I motori brushless sono una grandiosa invenzione, in quanto proprio grazie all’assenza delle spazzole non necessitano di manutenzione. La fortuna è fatta dalle applicazioni di mobilità elettrica che richiedono proprio componenti robusti.