è la categoria dove si trovano articoli di ingegneria robotica ma anche semplici guide su come realizzare un robot. L’elettronica applicata alla meccanica, quindi robotica educative e robotica industriale. Potrete inoltre leggere articoli anche sui droni radiocomandati. Dai più semplici per hobbisti, ai droni per riprese aeree ed a quelli professionali.
E' online il nuovo numero della rivista di elettronica Firmware 2.0 dedicata a Makers, Professionisti e Appassionati. Questo numero della rivista è focalizzato sul tema Robotics-Cloud Computing. All'interno del magazine potrete leggere contenuti esclusivi sull'elettronica embedded e i microcontrollori, progetti, tutorial a puntate, articoli tecnici sull'elettronica e le tecnologie emergenti, nonché sul mercato dell'elettronica. Ecco alcuni contenuti esclusivi da leggere in questo numero di Firmware 2.0: Memorizziamo i dati in maniera sicura con il confidential computing, Progetto di un robot di telepresenza con l’ESP32-CAM – Parte 1, Costruiamo un robottino in LEGO – Parte 1, Un sistema di riconoscimento facciale con …
In questo articolo vedremo la realizzazione passo passo di un semplice robottino costruito in LEGO a cui daremo vita usando una board di Arduino. Da sempre il LEGO è stato molto di più di un semplice gioco per bambini, oltre che divertire i piccoli ha appassionato e continua ad appassionare anche adulti di ogni età fornendo migliaia di modelli sempre in evoluzione per tutti i gusti e livelli, dal classico al moderno, dalle trasposizioni cinematografiche agli strumenti della vita reale, fino ad arrivare a modelli stradali, nautici, aerei e spaziali. Insomma, una infinita gamma di soluzioni per stimolare la …
I progressi nell’Intelligenza Artificiale hanno stimolato la nascita di diverse Autonomous Things come droni, robot e veicoli adatti a svolgere operazioni in modo autonomo. Mentre gli elettrodomestici sono largamente commercializzati, le auto a guida autonoma o i droni con passeggeri hanno davanti a sé almeno un decennio prima di passare alla produzione su scala industriale. Questo almeno per quanto riguarda il settore commerciale. La ricerca può permettersi costi più elevati e portare avanti progetti di robot a guida autonoma. Anche la JAXA, l'agenzia spaziale giapponese, in accordo con la Toyota, sta studiando per rendere la mobilità lunare autonoma una …
La rapida crescita del mercato della robotica mobile sta portando ad una crescente domanda di soluzioni a basso costo per la navigazione robotica. L'hardware tradizionalmente utilizzato per questa funzione è piuttosto costoso e spesso sovra dimensionato per l'applicazione specificata. Questa situazione ha dato origine ad una nuova classe di dispositivi LiDAR appositamente costruiti e volti a ridurre drasticamente i costi di ingresso nei sistemi robotici in grado di navigare. Questo articolo vuole essere una panoramica sulla navigazione robotica mobile basata sul dispositivo LiDAR. Introduzione La robotica mobile è un'area tecnologica e di ricerca che ha attirato molta attenzione negli …
Il robot di telepresenza è fondamentalmente un robot operativo a distanza dotato di telecamera e sensori. Il robot di telepresenza è utilizzato in molte istituzioni nel mondo: accademiche/di ricerca, militari e spaziali per esplorare località remote o aree in cui è troppo pericoloso per l'essere umano essere presente fisicamente. Pertanto, nel passato, per un appassionato di elettronica, costruire questo tipo di robot era solo un sogno, sia per la complessità di progettazione che realizzativa e per il notevole costo, ma, oggigiorno, poiché sul mercato sono disponibili moduli elettronici wireless sempre più economici e sofisticati, potremmo prendere parte all'eccitante possibilità …
Amazon Web Services (AWS) è ormai diventato uno dei leader nel settore del cloud computing. Uno dei suoi componenti principali è S3, il servizio di storage di oggetti. Con la sua impressionante disponibilità e durata, è diventato il modo standard per archiviare video, immagini e dati. Grazie alle sue potenzialità è possibile combinare S3 con altri servizi per creare applicazioni infinitamente scalabili. Boto3 è il nome dell'SDK Python per AWS. Esso consente di creare, aggiornare ed eliminare le risorse AWS direttamente dagli script Python. In questo articolo andremo a descrivere come operare su S3 attraverso uno script in Python. …
Per rendere più veloce il calcolo della trasformata DFT, l'algoritmo FFT venne sviluppato da James Cooley e John Tukey. Questo algoritmo è considerato uno degli algoritmi più importanti del 20° secolo. La trasformata DFT impiega N*N moltiplicazioni complesse per fornire i risultati, mentre l'algoritmo FFT impiega solo (N/2)*logN moltiplicazioni. Tale riduzione nel numero delle operazioni richieste diventa un vantaggio significativo quando il numero dei campioni è elevato. In questo articolo faremo un'analisi dell'algoritmo FFT e vedremo come implementarlo da zero utilizzando il linguaggio di programmazione Python. Introduzione La classica trasformata di Fourier permette di ottenere una rappresentazione nel dominio …
Nell'ultimo decennio, la rapida penetrazione di Internet e delle moderne tecnologie dell'informazione in tutti i rami della società e della vita degli individui, ha portato a un forte aumento degli utenti di Internet: già nel 2011, il loro numero aveva superato i 2 miliardi di utenti nel mondo. Un aumento delle capacità dei media e, di conseguenza, una diminuzione del costo delle informazioni memorizzate hanno portato ad una significativa diminuzione del costo dei servizi dei supporti di memorizzazione. Lo sviluppo delle tecnologie di programmazione ha portato all'uso efficiente delle risorse di calcolo dei sistemi multiprocessore e la distribuzione flessibile …
La tecnologia del cloud computing risale ormai a più di vent'anni fa. Il termine cloud, infatti, è stato usato per riferirsi a piattaforme per il calcolo distribuito già nel 1993. Adesso, questa stessa tecnologia, sta plasmando il mondo cibernetico e si evolve come elemento chiave di servizi per la condivisione di risorse, tra cui piattaforme e applicazioni software. Anche se porta una grande capacità di calcolo e benefici economici, le applicazioni del cloud computing sono ancora limitate. Infatti, ci sono moltissime richieste di servizi in loco basati sulla posizione fisica a cui il cloud computing non può ottemperare, a …
I cloud robot sono controllati da un "cervello" nel cloud. Il cervello, situato in un data center, fa uso di Intelligenza Artificiale e altre tecnologie software avanzate per affrontare compiti che nei robot tradizionali sarebbero effettuati da un controllore locale di bordo. Rispetto ai robot locali, i cloud robot genereranno nuove catene del valore, nuove tecnologie, nuove architetture, nuove esperienze e nuovi modelli di business. In questo articolo esploreremo tutti questi aspetti legati alla robotica cloud. Introduzione La robotica cloud è un concetto relativamente recente. I primi lavori risalgono al 2010, quando la Commissione Europea diede inizio al progetto …
Redazione
31 Gennaio 2022
Aerospace & Defense, AI, Arduino, Automotive, Blockchain, Embedded, Energy Harvesting, Industry 4.0 IIoT, IoT, LED Lighting & Opto, Makers & Progetti Fai Da Te, Mems & Sensors, Microcontrollori & FPGA, PCB Circuiti Stampati, Power & Motor, Raspberry Pi, RFID NFC, Robotica & Droni, Scienza & Tecnologia, Stampanti 3D, Test & Measurements, Wireless RF
Sono arrivati i giorni della Merla, il periodo più freddo dell'anno. Quale momento migliore per dedicare un pò del nostro tempo alla lettura? Anche quest'anno, in occasione dei giorni della Merla, Elettronica Open Source ti regala una grande opportunità. L'imperdibile Promozione dei giorni della Merla Solo fino al 6 Febbraio potrai usufruire subito di uno sconto sull'abbonamento annuale Platinum 2.0 e in più ricevere uno speciale omaggio esclusivo. L'abbonamento Platinum 2.0 potrà essere tuo per soli 29€ all'anno (meno di 3€ al mese!), invece di 37€/anno, con rinnovo annuale a prezzo ridotto, finché vorrai. Ma non è tutto! Si, …
Si può usare una scatola da scarpe come robot, dargli vita con un Arduino Nano e prenderne il controllo con un'applicazione fatta tramite App Inventor? Certo, ma la domanda giusta è: perché usare una scatola da scarpe? Perché usare un'applicazione Android? Nel precedente articolo abbiamo visto il circuito che governa il nostro robot di cartone, in questo ti accompagnerò a realizzare il codice Arduino e l'applicazione Android grazie ad App Inventor. In un articolo precedente, per la precisione questo, ci siamo chiesti: "Ma cosa spingerà mai una persona a usare una scatola da scarpe per dare vita ad un robot …
Si può usare una scatola da scarpe come robot, dargli vita con un Arduino Nano e prenderne il controllo con un'applicazione fatta tramite App Inventor? Certo, ma la domanda giusta è: perché usare una scatola da scarpe? Perché usare un'applicazione Android? In questo primo articolo-tutorial ho il piacere di condividere tutto il necessario per dare vita a quello che può essere non solo un progetto per imparare a programmare Arduino, ma anche un giocattolo dal costo contenuto e altamente personalizzabile. Cosa dovrebbe spingere una persona ad usare una scatola da scarpe da impiegare come chassis per un robot e …
Se ne parla già da tempo, ma non sembrava che questo evento fosse poi così imminente: l’arrivo del BVLOS (Beyond Visual Line Of Sight) è ormai realtà e con esso si prevedono grandi novità in vari settori. Grazie a questo piccolo, grande strumento sarà infatti possibile andare oltre i limiti visivi che hanno confinato il viaggio dei droni nello spazio. A dimostrarlo è il fatto che l’arrivo del BVLOS ha già suscitato l’interesse di un numero sempre più crescente di professionisti geo-spaziali per quello che concerne le sue possibili applicazioni, rendendo l’argomento come uno dei più discussi in tutto …
Il piccolo robot Roamer è un'intelligente dimostrazione di come, anche solo con l'utilizzo di materiali e componenti semplici e facilmente reperibili a basso costo, si possano implementare soluzioni per creare robot che non rimangono mai senza energia. Roamer è un piccolo robot mobile in grado di ricaricarsi da solo. I piccoli robot stimolano la creatività di makers, studenti e appassionati di elettronica Per tutti gli appassionati di robotica ed elettronica e, in particolare, per i makers, i piccoli robot mobili sono molto divertenti e da sempre appassionano persone appartenenti ad ogni fascia di età. Ma non sono soltanto uno …
Quando si parla di droni ci si riferisce, per antonomasia, a quei dispositivi utilizzati per uso aereo. Declinati agli usi più disparati in volo, rappresentano i prodotti di punta della tecnologia dell’ultimo secolo. Tuttavia, spesso non si pensa ai droni sottomarini: i droni AUV si stanno ritagliando un grande spazio nel settore della perlustrazione marina. I droni stanno affrontando le sfide più ardue, in generale, ma navigare nel fondo degli abissi davvero sembra un’esperienza fantascientifica. Droni AUV: perché tanto interesse da parte del mercato? Dal controllo del territorio all'aspirazione dei rifiuti oceanici, dalla movimentazione di oggetti al monitoraggio sottomarino: i …
Cari lettori, E' TEMPO DI GRANDI NOVITA' in Elettronica Open Source. Ora Elettronica Open Source diventa ANCORA PIU' SMART E DIGITALE! A partire da questo numero, infatti, potrete leggere Firmware 2.0, la rivista tecnica digitale più letta in Italia, in versione sfogliabile online comodamente dal vostro dispositivo, tablet, computer o smartphone. Potrete quindi sfogliare e leggere la rivista proprio come un ebook, fruibile quando e dove preferite, in ufficio, a casa o in spiaggia sotto l'ombrellone se siete ancora in vacanza. Ogni mese avrete tutta l’elettronica a portata di click, con progetti, focus e approfondimenti sul mondo dell’elettronica embedded, …
I robot autonomi sono sistemi complessi che richiedono l'interazione tra numerosi componenti eterogenei (software e hardware). I middleware robotici nascono come risposta all'aumento della complessità delle applicazioni robotiche e della vasta gamma di hardware. Sono progettati per promuovere l'integrazione di nuove tecnologie, semplificare la progettazione del software nascondendo la complessità della comunicazione di basso livello e l'eterogeneità dei sensori, migliorare la qualità del software, nonchè per ridurre i costi massimizzando la produzione. Questo articolo presenta una panoramica dei middleware robotici più utilizzati descrivendone le caratteristiche che motivano la scelta dell'uno rispetto all'altro. L'attenzione passa poi al Robot Operating System …
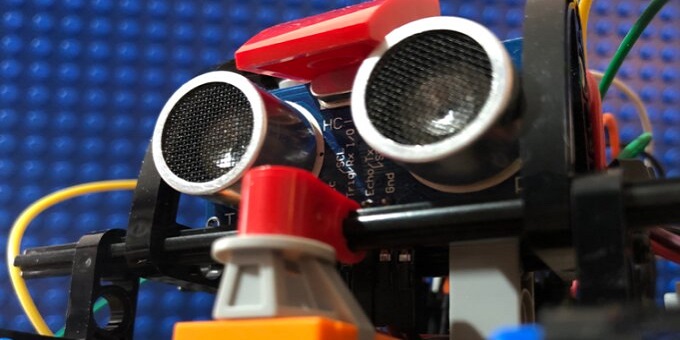
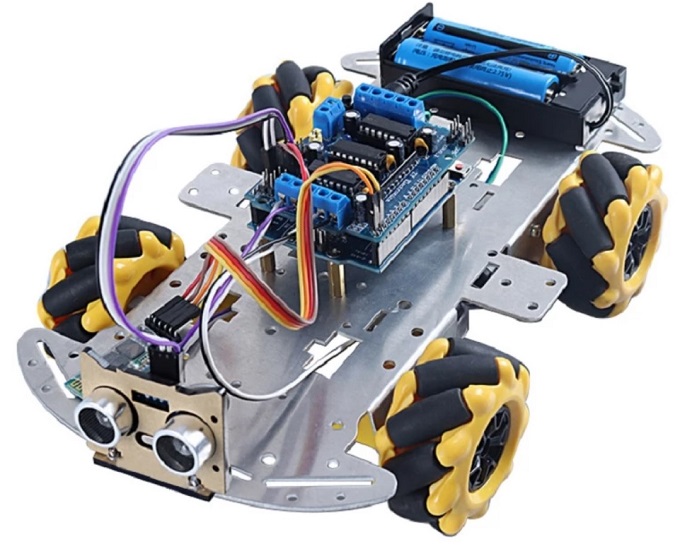
La maggior parte della nostra percezione del robot è basata su film Hollywoodiani come i famosi robot 3CPO e R2D2 di Star Wars fino al simpatico robot mangiatore di rifiuti di nome WALL-E, dell’omonimo cartone animato; queste macchine sono un esempio di ciò che tutti noi pensiamo dovrebbe essere il robot. Anche se il robot che costruiremo qui è ancora lontano dalle tecnologie mostrate in quei film, almeno ci consentirà di introdurci al mondo della robotica. Con questo articolo inizia una serie di articoli/tutorial che ci introdurrà passo-passo nel mondo della robotica. Cominceremo realizzando PRAM, il Primo Robot Autonomo …
Che cosa sono e come funzionano i servomotori? Come mai sono così famosi? Non c'è nessun segreto, solo tanta genialità di cui ho il piacere di parlarti in questo articolo! Servomotori: ti stai chiedendo cosa sono quei piccoli involucri di plastica con sopra una sottospecie di elica? Stai cercando di capire per quale motivo sono così famosi? Oppure sai già tutto e ti stai chiedendo come funzionano per dare vita al tuo robot? Andiamo con ordine assieme in questo articolo dove ti risponderò a tutto questo. Ma prima di cominciare, permettimi di presentarmi: sono Lorenzo Neri: chief education officer …