Questo progetto si basa su un robot autonomo e compatto alimentato dall'ESP32 della Espressif e dotato di un cervello di apprendimento automatico scritto in PHP. Trasmettendo video in diretta a un server Web remoto, questo robot riceve infatti i comandi da un modello di Machine Learning basato su PHP.
Il robot autonomo è alimentato da un microcontrollore Espressif ESP32 e da un modello di apprendimento automatico scritto in un'insolita scelta di linguaggio di programmazione: il PHP. Si tratta di un piccolo robot controllato da uno script di apprendimento automatico in grado di andare avanti, indietro, a sinistra, a destra, fermarsi, il tutto controllato dai dati della telecamera elaborati su ML. E in tutto ciò, c'è anche una parte divertente: il codice ML è scritto in PHP usando la libreria Rubix ML. Il robot invia immagini utilizzando un'API REST al server e riceve comandi di spostamento come risposta.
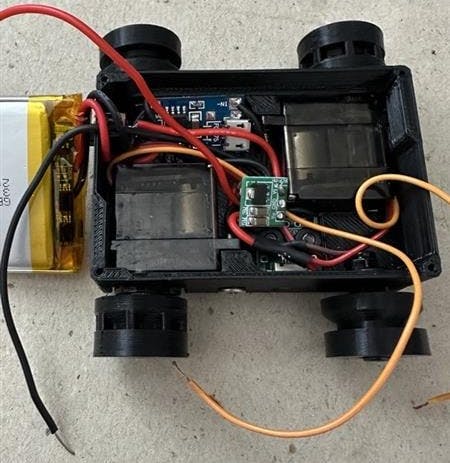
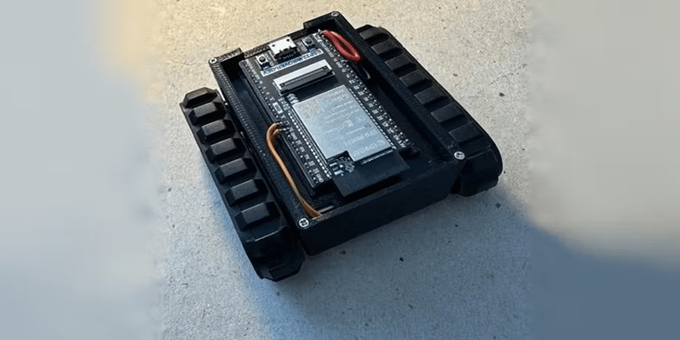
Un telaio del serbatoio stampato in 3D e un microcontrollore Espressif ESP32 guidano questo robot, ma il suo cervello è puro PHP. Sviluppato da Rasmus Lerdorf e lanciato nel lontano 1995, PHP, noto originariamente come Personal Home Page, e divenuto in seguito PHP Hypertext Preprocessor, è un linguaggio sviluppato saldamente per il web. Nel progetto, invece, funge da cervello del robot. Un flusso video a basso frame rate viene trasmesso dal robot a un server web, dove l'applicazione PHP lo elabora per localizzare gli oggetti e trasmettere comandi di controllo guidando il robot verso il suo obiettivo. Il robot stesso è costruito attorno a un microcontrollore Espressif ESP32 con un sensore della fotocamera e prevede un sensore di collisione in futuro, con due servomotori a 360 gradi che guidano cingoli in stile carro armato assemblati attorno a un alloggiamento stampato in 3D.
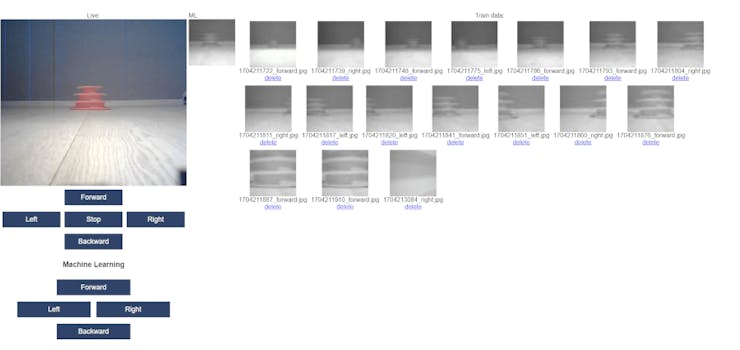
Il modello di Machine Learning viene eseguito su un laptop, ricevendo un flusso video ed elaborandolo per restituire i comandi di movimento. L'addestramento ML e l'analisi delle immagini dalla fotocamera sono in esecuzione sul laptop che comunica con il server il quale, a sua volta, comunica con il robot. E' possibile controllare il robot da Internet e aggiungere dati di addestramento per il Machine Learning. Quando è stato addestrato il modello ML, è stato anche testato sul robot e verificato il suo comportamento. Se si aggiunge un sensore di collisione, si può addestrare un nuovo modello ML dopo la collisione con nuove immagini, automaticamente senza alcuna interazione umana. Maggiori informazioni sul progetto completo sono disponibili nella sezione Riferimenti di seguito.
Riferimenti
Mini robot ESP32 + CAM - Machine Learning (PHP), controlled from remote server : ArduinoProjects


