Elettronica Open Source presenta una Raccolta di Progetti Embedded realizzati dai nostri Autori. Gli articoli progettuali sono rivolti a Makers, Hobbisti, Appassionati di DIY e Professionisti del settore elettronico. In questa Raccolta sono presenti diversi Progetti Embedded che potrete realizzare seguendo le istruzioni indicate step by step negli articoli tecnici. I Progetti sono completamente Open Source e sono replicabili. Ecco alcuni articoli inclusi in questa raccolta: Tester IoT di temperatura e umidità, sistema multisensoriale per la smart home, riconoscimento facciale per la domotica, robot PRAM fai da te e molto altro.
1.Tester IoT di temperatura e umidità con sensore DHT11, ESP8266 e ThingSpeak

In questo articolo viene descritto il progetto di un semplice sistema di monitoraggio di temperatura e umidità via web. In sostanza, sarà descritto come interfacciare il sensore DHT11 con il modulo transceiver WiFi ESP8266 e, mediante l’applicazione ThingSpeak, monitorarne i dati anche da remoto via web.
2.Un sistema Multisensoriale per la Smart Home – Parte 1

Questo articolo descrive un approccio all’utilizzo della tecnologia in modo pratico e significativo all'interno di un sistema di casa intelligente, che può essere implementato in contesti residenziali. Nel mondo moderno le persone si stanno rapidamente rivolgendo alla tecnologia come un modo rapido ed economico per migliorare la qualità della vita quotidiana. L’obiettivo principale è soddisfare le esigenze dell'utente finale utilizzando sensori ambientali a bassa potenza e a basso costo collegati in rete. Il sistema proposto nel progetto consiste nel rilevamento diretto dell'ambiente, raccolta e analisi dei dati con controllo da remoto mediante web server su smartphone e altri dispositivi connessi in rete. Il sistema Multisensore si compone di un gruppo di sensori, di un dispositivo di gestione basato sul microcontrollore WiFi ESP8266 integrato nel modulo D1 Mini NodeMCU, e di un’applicazione web server per il controllo dei sensori tramite un'interfaccia user-friendly per dispositivi mobili e PC.
3.Un sistema Multisensoriale per la Smart Home – Parte 2

Nell’articolo “Un sistema Multisensoriale per la Smart Home – Parte 1” abbiamo descritto i componenti del progetto Multisensore, il funzionamento del circuito e come realizzarlo utilizzando lo schema elettrico riportato nella Figura 4 dell’articolo Parte 1. Abbiamo installato nella scheda D1 Mini il driver del chip CH340 e alcune librerie di gestione dei sensori, infine, abbiamo testato il funzionamento del modulo D1 Mini mediante il programma di esempio Blink.
4.Riconoscimento facciale per la domotica con l’ESP32-CAM – Parte 1

Negli ultimi anni è diventato necessario disporre di un sistema di sicurezza affidabile in grado di proteggere i nostri beni nel modo migliore e più sicuro possibile. I sistemi di sicurezza tradizionali richiedono all'utente una chiave, una password di sicurezza, una scheda RFID o una badge d'identità per avere accesso al sistema. Tuttavia, questi sistemi di sicurezza hanno delle carenze, ad esempio, possono essere dimenticati o rubati da persone non autorizzate. Di conseguenza, è necessario sviluppare un software che garantisca un livello di sicurezza più elevato. Il riconoscimento facciale è uno dei metodi più diffusi della tecnologia biometrica. In questo articolo e in successivi altri due articoli, proponiamo il progetto di un sistema di riconoscimento facciale per il controllo degli accessi non professionale basato sulla scheda di sviluppo ESP32-CAM.
5.Riconoscimento facciale per la domotica con l’ESP32-CAM – Parte 2
In questo articolo riprendiamo il progetto iniziato nel precedente articolo "Riconoscimento facciale per la domotica con l’ESP32-CAM – Parte 1" in cui abbiamo testato la videocamera della scheda di sviluppo ESP32-CAM utilizzando lo sketch di esempio "CameraWebServer" estratto dagli esempi dell’IDE di Arduino.
6.Riconoscimento facciale per la domotica con l’ESP32-CAM – Parte 3

Come abbiamo visto nel precedente articolo "Riconoscimento facciale per la domotica con l’ESP32-CAM - Parte 2", il codice dello sketch "CameraWebServerPermanent" registra i volti permanentemente in memoria, ma l’interfaccia utente grafica è limitata. Inoltre, per cancellare i volti occorre un altro apposito codice che oltretutto non consente di cancellare un singolo volto ma cancella tutti i volti registrati. In questo articolo vedremo una più evoluta applicazione di riconoscimento facciale con più ricche funzionalità interattive ed una più efficiente interfaccia grafica.
7.Progetto di un sistema di controllo di servomotori con web server – Parte 1

Nel settore della produzione industriale gli strumenti di lavorazione frequentemente utilizzati dipendono generalmente dai fattori di posizione e velocità. I controlli di posizione e velocità vengono effettuati tramite motori elettrici. Anche se le strutture di questi motori variano, tutti trasformano l'energia elettrica in energia meccanica. Per il controllo di posizione e velocità ogni motore elettrico potrebbe non essere adatto. In tal caso, quando si sceglie un motore elettrico è necessario considerare l'entità della forza da controllare. Nelle applicazioni in cui la posizione deve essere controllata con precisione, vengono solitamente utilizzati motori passo-passo o servomotori. I servomotori sono principalmente preferiti nei controlli di sistema con bassa richiesta di potenza. In questo articolo applicativo presentiamo la prima parte di un semplice progetto di un sistema IoT di controllo di un servomotore basato sull’utilizzo della scheda di sviluppo ESP32 DevKitC V4 della Espressif Systems, di un servomotore SG90 e di un web server. Questo progetto puramente dimostrativo, benché applicabile in pratica per piccoli utilizzi, vuole essere una sorta di tutorial per chi volesse approfondire l’argomento sul controllo dei servomotori e realizzare in proprio un simile progetto. La descrizione del progetto sarà preceduta da una propedeutica panoramica sui servomotori.
8.Progetto di un sistema di controllo di servomotori con web server – Parte 2

Nel precedente articolo "Progetto di un sistema di controllo di servomotori con web server – Parte 1", abbiamo fatto una panoramica sui servomotori e introdotto la descrizione del progetto. In questa seconda parte, inizieremo analizzando i due componenti del progetto, la scheda di sviluppo ESP32 DevkitC V4 e il servomotore SG90. Data la complessità funzionale e le sue enormi potenzialità eventualmente sviluppabili in altri progetti, sarà descritta dettagliatamente la scheda di sviluppo ESP32.
9.Progetto di un sistema di controllo di servomotori con web server – Parte 3

Il precedente articolo "Progetto di un sistema di controllo di servomotori con web server - Parte 2" è stato orientato alla trattazione della scheda di sviluppo ESP32 in quanto abbiamo ritenuto che sia propedeutica alla migliore comprensione di questo tutorial, ma anche per altri progetti che i lettori desiderino realizzare. In questa Parte 3, descriveremo l’altro componente del progetto, il servomotore SG90, poi tratteremo la programmazione dell’ESP32 mediante l’IDE di Arduino e, infine, la realizzazione e il collaudo del prototipo.
10.Un sistema IoT di controllo remoto degli attuatori con l’ESP32

Con questo articolo proponiamo a titolo dimostrativo, il progetto di un sistema IoT di home automation per il controllo di attuatori lineari o di motori a 12 V, mediante l’impiego del microcontrollore Wi-Fi ESP32 e di alcuni moduli relè. L’ESP32 con connettività IP tramite Wi-Fi locale, consente all’utente l'accesso e il controllo da remoto di attuatori e motori, utilizzando un’applicazione web server installata su dispositivi mobili come smartphone, tablet e PC. Il software, con poche modifiche, consente di espandere il numero di attuatori controllabili. Gli attuatori possono essere utilizzati ad esempio per l’apertura/chiusura di finestre, tapparelle, lucernari, serrande etc., a seconda della tensione di alimentazione degli attuatori. In questo esempio, per motivi di sicurezza, il progetto prevede l’impiego di dispositivi alimentati a 12 V.
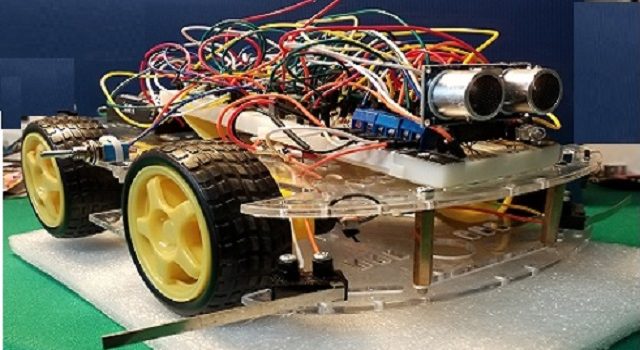
11.PRAM, il tuo Primo Robot Autonomo Mobile – Parte 1

La maggior parte della nostra percezione del robot è basata su film Hollywoodiani come i famosi robot 3CPO e R2D2 di Star Wars fino al simpatico robot mangiatore di rifiuti di nome WALL-E, dell’omonimo cartone animato; queste macchine sono un esempio di ciò che tutti noi pensiamo dovrebbe essere il robot. Anche se il robot che costruiremo qui è ancora lontano dalle tecnologie mostrate in quei film, almeno ci consentirà di introdurci al mondo della robotica. Con questo articolo inizia una serie di articoli/tutorial che ci introdurrà passo-passo nel mondo della robotica. Cominceremo realizzando PRAM, il Primo Robot Autonomo Mobile.
12.PRAM, il tuo Primo Robot Autonomo Mobile – Parte 2

Nel precedente articolo “PRAM, il tuo Primo Robot Autonomo Mobile – Parte 1” abbiamo introdotto il progetto del PRAM, un semplice progetto di robot autonomo mobile basato sul modello di una smart car, che utilizzeremo come tutorial per l’approccio al mondo della robotica. Nella prima parte abbiamo illustrato l’assemblaggio dello chassis della smart car con i quattro motori ed i rispettivi encoder di velocità. In questo tutorial utilizzeremo solo due motori e nessun encoder; gli encoder li abbiamo installati in previsione di successivi progetti di smart car più complessi ed evoluti. Abbiamo, inoltre, riportato lo schema elettrico della scheda di controllo e la descrizione del funzionamento di PRAM. In questo articolo faremo un breve riepilogo del progetto e tratteremo la descrizione dettagliata dei principali componenti del robot car PRAM.
13.PRAM, il tuo Primo Robot Autonomo Mobile – Parte 3

Nel precedente articolo “PRAM, il tuo Primo Robot Autonomo Mobile – Parte 2” abbiamo descritto il progetto e i principali componenti di PRAM. In questa terza parte del progetto/tutorial della smart car PRAM realizzeremo la scheda di controllo, la installeremo sullo chassis della smart car e programmeremo la scheda di sviluppo uChip utilizzando l’editor di sviluppo di Arduino.
14.PRAM, il tuo Primo Robot Autonomo Mobile – Parte 4
Nel precedente articolo “PRAM, il tuo Primo Robot Autonomo Mobile – Parte 3” abbiamo realizzato e installato la scheda di controllo di PRAM, eseguito tutte le fasi propedeutiche alla programmazione della scheda di sviluppo uChip, infine, abbiamo creato e salvato lo sketch del codice per il funzionamento di PRAM. In questa quarta ed ultima parte del progetto, descriveremo gli aspetti più rilevanti del codice e lo caricheremo nella scheda di sviluppo uChip, eseguiremo le tarature e il collaudo funzionale del prototipo e, finalmente, vedremo PRAM all'opera.